基于Zigbee平臺的車輛間微網系統
2024-06-16 05:03:12趙正健程良
電腦知識與技術 2024年12期
趙正健 程良

關鍵詞:交通擁堵;自組網通信;Zigbee模塊
1 研究背景
1.1 課題的背景及研究目的
1.1.1 課題來源及背景
近年來,數字家庭、無線通信、無線控制、無線定位、無線組網和移動連接等詞語頻頻出現在新產品中[1]。由于IT產業的高速發展、網絡的普及、家電的智能化以及單片機強有力的功能拓展,智能產品已經進入我們的生活。面對社會的快速發展,現有的交通設施建設已經無法滿足人們對出行的要求[2]。雖然進行了大規模的地鐵和道路建設,但大部分時間路上依舊很堵。
1.1.2 研究目的
通過對擁堵問題的分析發現,導致擁堵的大部分原因是駕駛員不能相互理解對方的意思,導致行車效率低下。一旦發生擁堵,缺乏良好的溝通便會加劇擁堵現象[3]。本論文設計了一種能夠使車輛自組網的系統,無需其他設備參與。當車輛在一定的通信距離內,駕駛員按下按鍵,便可與周圍車內駕駛員進行相互通信,從而提高了行車效率。此外,在徹底擁堵時,該系統能夠有效溝通,有助于疏導交通。
2 系統需求與相關技術
2.1 本論文的系統需求
1) 核心控制器采用51單片機和無線模塊。
2) 建立Zigbee無線硬件平臺:以cc2530為核心建立Zigbee無線開發平臺,所需的基本硬件平臺包括開發板、計算機、仿真器等[4]。
3) 建立Zigbee無線軟件平臺:軟件部分主要是編程開發平臺,如IAR,以及支持無線通信的Zigbee協議棧。
4) Zigbee協議棧:支持從應用層到物理層的信息傳遞。
2.2 相關技術
1) 信道接入技術的研究:在無線自組網中,一個節點發送數據時,只有鄰近的節點可以接收,而其他節點無法感知,但它們也會發送數據,這時就會出現數據沖突[5]。因此,在后續的研究過程中必須專門研究特殊的信道接入技術。
2) 路由協議的研究:由于汽車不停運動,無線自組網中會出現信道衰耗、干擾等原因,導致網絡拓撲結構頻繁變化。因此,要實現多跳路由,就需要相應的路由協議支持。
3) 服務質量的問題:Zigbee技術的帶寬不足。
4) 多播技術的研究:由于無線自組網拓撲結構不斷發生動態變化,信道會不足。
2.3 設計方法
該論文設計的實驗首先可應用在公交車上,以提高交通運營效率,并為之后安裝在私家車上打下基礎。通過兩車之間的無線通信,利用Zigbee的自動組網技術,使兩車能夠彼此了解彼此的距離,避免兩車同時到站以及運營過程中效率低下的問題。其工作原理是,兩輛車分別安裝Zigbee,并外加LED指示燈。當車間距離接近2km時,LED指示燈亮起;當距離增大時,LED指示燈熄滅,從而有效地指示司機何時加速何時減速。與目前的預計公交車到站的App相比,這種產品是以司機和公交公司為出發點的,而不是以個人為出發點的。兩種產品不會發生沖突,相反,它們是互補的產品。此外,這個產品還可以進一步拓展功能。
2.4 技術路線
由于Zigbee技術具有自組網功能,裝有Zigbee的車輛之間可以進行數據傳輸[6]。在發射模塊上編寫程序時,以非常短的時間間隔發送數據,并同時編寫加速度計算程序,這樣就可以計算出車輛的各種運動參數。因此,主要的技術還是在程序編寫上。
3 CC2530 芯片介紹
3.1 無線模塊
無線模塊=發射器+接收器+控制器。一般我們所見到的有三種類型:1) ASK(用在遙控器上);2) 無線收發模塊(通過單片機來控制其接收和發送數據);3) 無線數傳模塊(直接通過串口進行數據的收發)。工作頻率也有三種:315MHz,433MHz,2.4GHz。315MHz 一般是ASK無線模塊,代表型號是YB315;433MHz的代表型號有CC1101S,CC1101+PA+LNA,YB30,YB32;2.4GHz 的代表型號有CC2500S,CC2500M,CC2500+PA+LNA,YB2530,YB2530+PA 等。如果按發射功率分,一般也分為3種:1mW,10mW,100mW。但是有些廠家自行加裝PA(功率放大器)達到1W 以上。
3.2 控制線引腳功能
為了對Zigbee模塊的充分利用,需要指導它各個功能,如表1所示。
4 系統設計
4.1 硬件設計
功能要求:50米內無線自組網,傳輸速度快,支持語音通信。
其他要求:體積小,成本低。
根據功能選擇器件:RF模塊、CPU、語音模塊、電源模塊、USB轉串口模塊、各種傳感器以及LED[7]。(這里直接選擇CC2530芯片,內部包含CPU以及無線模塊,USB轉串口使用的是PL2303芯片。)
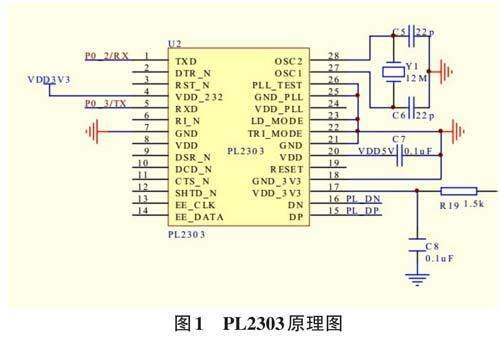
1) USB轉串口選擇使用PL2303,主要是因為畢業設計對穩定性要求不高,而PL2303 價格便宜。見圖1。
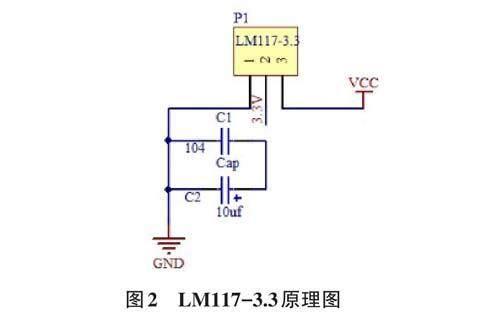
2) 電源模塊。這里選擇使用開關電源,是因為它的結構中沒有中間的變壓器和散熱片,因此體積非常小。同時,開關電源內部都是電子元件,具有高效率和低發熱的特點[8]。雖然具有電磁干擾等缺點,但是現在的屏蔽技術已經可以解決這些問題。這里首先使用LM2576 芯片將12V 轉換為5V,然后再用LM117-3.3將5V轉換為3.3V。
LM117-3.3芯片的1號引腳接地,2號引腳為3.3V 輸出引腳,3號引腳為5V輸入引腳,C1、C2為兩個濾波電容。由于LM117-3.3V輸出的電源紋波較大,必須通過電容進行濾波,才能得到穩定輸出的3.3V 電源。
3) USB轉換模塊。因為CC2530單片機需要與電腦通過RS232實現通信,而電腦是RS232電平,高電平用+12V 表示,低電平用-12V 表示。而單片機是TTL電平,高電平用+5V表示,低電平(邏輯負)用0V 表示[9]。因此,要實現RS232和TTL的通信必須使用電平轉換芯片。本系統采用的轉換芯片為CH340G,其供電電壓為3.0V至5.5V。
4.1.1 設計目的
可以將支持Zigbee技術的該模塊安裝到汽車上,并確保其能夠正常工作。
4.1.2 參數要求
1) 距離:2km左右;2) 電壓3.3V;3) 傳輸速率;4)CPU的處理速度。
4.1.3 解決方案
1) 一般的Zigbee只能傳輸大約100米左右的距離,所以需要加入功率放大器才能實現更遠的傳輸距離,電路圖見附錄。
2) 因為一般公交車提供的電壓為24V,所以需要電源模塊將其降壓至3.3V,電路圖見附錄。
3) 現在Zigbee 技術所支持的傳輸速率只有250bit/s,所以對于語音和視頻的傳輸來說仍然遠遠不夠,只能進行初步信號的傳輸[10]。
4) 當下市場上所有的CPU都能滿足要求。
4.2 軟件設計
Zigbee技術采用自組織網的方式組建網絡,Zig?bee網絡的設備分為協調器、路由器和終端節點。系統的軟件設計采用宏編譯的方式,三個設備的程序放在同一個工程中,通過宏編譯的方式選擇設備。本系統所涉及的只有協調器和終端節點兩種設備。通過模塊化程序設計,將該系統實現的功能進行分布式設計,主要完成組網以及信息的輸入、處理和輸出等任務。
4.2.1 設計目的
通過模塊化程序設計,將該系統所實現功能進行分布設計。主要完成組網以及信息的輸入、處理、輸出等。
4.2.2 程序設計
主程序設計是指導每個模塊功能的重要部分,決定整體的工作效率。流程圖如圖3。
協調器軟件設計:
協調器作為整個無線網絡的監控部分,協調整個網絡的功能。程序設計如圖4。
5 建立Zigbee 無線軟硬件平臺
5.1 硬件準備
一臺電腦,兩個開發板,功率放大器,下載器,電源模塊。
5.2 軟件準備
IAR軟件,具體的安裝步驟以及這次試驗所進行的操作過程都在附錄中詳細地進行了描述。
5.2.1 安裝IAR 以及下載組網程序
作為Zigbee的開發環境,IAR是一款集成度非常高的應用軟件,可以將Zigbee 配置成不同的工作模式,原理圖如圖5所示。
5.2.2 安裝仿真驅動
具體的安裝步驟,以及詳細的電腦操作都在附錄中詳細的記錄。
5.2.3 進入調試
實物焊接完成后,并不一定就能立即使用,需要首先利用萬用表進行簡單的測量,主要測量以下內容:
第一:測量電路板中所有的電源VCC,包括5V和3.3V,是否通路;
第二:測量所有的地GND是否通路;
第三:測量VCC和GND之間是否存在短路現象;
第四:測量所有的信號引腳是否通路。
只有滿足上述四種情況才能上電進行測試。上電后還需要使用萬用表進行測量,主要內容如下:
第一:測量電源和地之間的電壓值,例如輸入是5V的電壓必須是5V,經過LM117-3.3V芯片的電壓必須是3.3V。如果電壓值不正確且差異較大,則需要重新檢查電路;
第二:對于LED的檢測,本次設計的LED是共陽LED,因此另一端接地后LED會亮起。因此,在測試LED時,使用一根導線分別將LED的另一端與導線連接,觀察LED是否亮起。這種方法可以驗證LED連接是否正確,同時也可以通過萬用表繼續測量LED的好壞。
如果以上測試都正常,就可以在PC上編寫控制軟件,進行代碼調試。
6 總結
本文主要利用Zigbee模塊作為信息交互橋梁,通過Zigbee模塊的自組網功能,使通信范圍內的車輛能夠相互通信,加強駕駛員之間的溝通,緩解交通問題。由于整體功能測試難度較大,因此該論文通過LED的閃爍來說明情況。通過將Zigbee模塊設計為終端、路由器以及協調器模式,并通過自組網功能使三者進行信息的交互,為駕駛員的溝通打下基礎。
針對無線網絡的發展以及其在交通領域的研究方向,可以解決許多問題,例如公交車運行效率問題。通過兩車之間的無線通信,利用Zigbee的自動組網技術,使兩車能夠彼此了解彼此的距離,避免兩車同時到站以及運營過程中效率低下的問題。同時,用戶可以實時監控車輛的運動參數,也可以遠程觀看自己汽車的實時畫面。對于無線自組網的功能,可以利用的場景還有很多,相信在其他行業也可以通過無線網絡的支持獲得更加強大的功能。