基于3D相機成像的公路護欄梁板中心高度快速檢測技術研究
2024-06-17 10:55:42錢敬之范道英
交通科技與管理 2024年11期
錢敬之 范道英

收稿日期:2024-03-20
作者簡介:錢敬之(1975—),男,本科,高級工程師,從事道路交通工程及沿線設施檢測以及智能交通研究等工作。
通信作者:范道英(1986—),女,本科,工程師,從事道路交通工程沿線設施檢測及質量管理等工作。
摘要 中心高度是公路波形梁鋼護欄的一個重要工程指標,無論是新建護欄還是運營期公路的波形梁鋼護欄,均需對其中心高度進行檢測。文章為實現對波形梁鋼護欄中心高度的快速檢測,基于3D相機成像技術開發了車載式的梁板中心高度快速檢測系統,并就該檢測系統與傳統人工檢測的結果進行對比,同時就該系統在工程實際中的應用效果進行了分析,以期為公路波形梁鋼護欄中心高度檢測提供新的思路。
關鍵詞 波形梁鋼護欄;中心高度;3D相機;檢測
中圖分類號 U418.7文獻標識碼 A文章編號 2096-8949(2024)11-0067-04
0 引言
護欄作為公路的重要附屬設施,其在保障道路交通安全方面發揮著至關重要的作用,截至目前,我國公路總里程逾5 350 000 km,隨著新建公路及運營公路里程的不斷增加,作為交通安全設施重要組成部分的公路護欄里程也在不斷增加。公路護欄中波形梁鋼護欄因防撞性能良好,在各等級公路中均得到了廣泛的應用,尤其是在高等級公路中,大都采用波形梁鋼護欄。
波形梁鋼護欄具有引導行車人員視線、防止車輛沖出路面、保護車輛及司乘人員等功能,但其功能的正常發揮是以安裝養護到位為基礎的,而在波形梁鋼護欄的各項技術參數中,梁板中心高度值是一個非常重要的指標,在各階段針對護欄的檢測中都需要對其進行現場檢測[1]。但當前的檢測方式效率較為低下,嚴重依賴于人工操作,因此該文提出了一種基于3D相機成像的公路波形梁鋼護欄梁板中心高度快速檢測技術。
1 公路波形梁鋼護欄分類及其技術要求
當前在公路工程中所應用的波形梁鋼護欄分為兩波形梁板鋼護欄和三波形梁板鋼護欄,針對不同類型的波形梁鋼護欄,相關規范中對其梁板中心高度的要求也有所不同。在《公路交通安全設施設計細則》(JTG/T D81—2017)中規定了兩波形梁板中心高度為600 mm,三波形梁板中心的高度為697 mm,該規范從設計的角度對不同類型波形梁鋼護欄梁板的中心高度作出了規定,為波形梁鋼護欄的設計以及施工提供了明確的依據[2]。在工程實踐中,對于新建公路,可能由于施工因素導致梁板中心的高度無法滿足規范要求,而對于運營期的公路,則可能由于車輛碰撞、自然環境、人為破壞等因素使得梁板中心高度發生變化,所以無論是在公路的交竣工階段還是運營期,都需要對護欄梁板中心高度進行檢測,以確保其滿足規范的要求。
2 波形梁鋼護欄梁板中心高度檢測方法概述
2.1 尺量檢測
根據《公路工程質量檢驗評定標準 第一冊 土建工程》(JTG F80/1—2017)規定,波形梁鋼護欄橫梁中心高度允許偏差為±20 mm,其中所規定的檢測方法為尺量,每1 km每側測5處[3]。該抽檢方式采樣間距達到200 m,往往無法真實表征梁板中心高度的實際情況,同時采樣點的選擇對于最終的檢測結果也有較大的影響。采用尺量檢測的方式針對里程較長的護欄,所需要的檢測時間也會大幅增加,尤其是對于高速公路,在檢測過程中由于需要保證現場檢測人員的人身安全,往往需要封閉交通進行[4]。
2.2 基于線結構光掃描的測量技術
在白佳迪[5]的研究中,其通過巡檢機器人載運平臺,基于結構光視覺傳感器所采集的圖像,并通過設計相應的算法對所采集的圖像進行處理,然后結合系統標定結果進行護欄中心高度的解算。但是在其研究中,整個巡檢機器人載運平臺與護欄之間的距離需要保持恒定,在通過計算機對梁板中心高度進行計算的過程中,需要依賴于載運平臺的高度保持相對恒定。該檢測方式的檢測效率相較于尺量檢測有了大幅提升,但是其巡檢機器人需要與護欄之間建立連接以使得二者之間的距離在檢測過程中保持穩定,同時在檢測的過程中,由于所采用的是小型機器人,往往也不適用于全路段的檢測。此外,在梁板中心高度解算方面,其算法相對復雜,而在實際的檢測過程中,周邊環境、護欄自身狀況都會對最終的計算結果造成影響。因此,該檢測技術在工程實踐中的應用仍然受限。
3 基于3D相機成像的公路波形梁鋼護欄梁板中心高度快速檢測系統
3.1 基于3D相機成像的測量原理分析
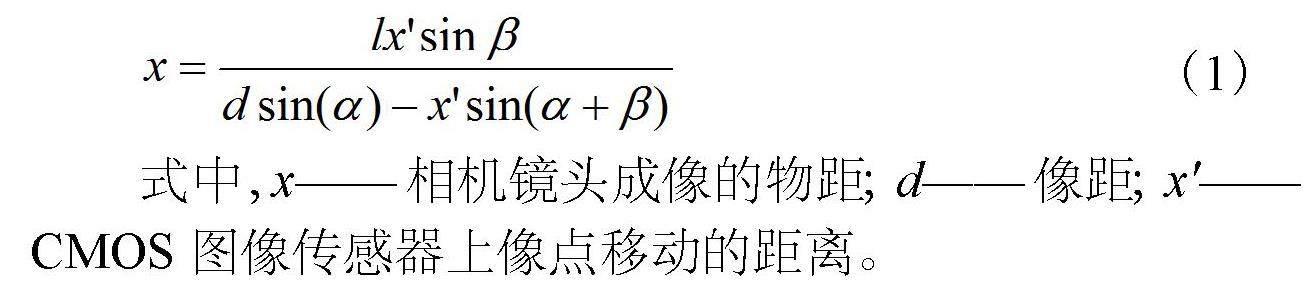
3D相機中的激光發生器所發出的激光被投射到待測物體表面時,在待測物體的表面會形成激光條紋,而激光經過物體表面的漫反射或反射又會被3D相機的CMOS傳感器捕捉,此時激光發生器、待測物體的表面以及圖像傳感器在空間上就會形成一定的三角幾何關系,而CMOS傳感器所捕捉的激光條紋圖像則包含了被測物體的三維信息,CMOS圖像傳感器中的成像點對于基準點的位移距離與被測物體表面相對于基準面高度之間的關系如式(1)所示,再通過建立合適的數學模型,即可實現對待測物體表面三維信息的提取,從而實現對于待測物的測量[6]。
(1)
式中,x——相機鏡頭成像的物距;d——像距;x'——CMOS圖像傳感器上像點移動的距離。
3.2 梁板中心高度快速檢測系統的硬件組成
該文基于線激光3D成像原理設計了針對公路波形梁鋼護欄梁板中心高度檢測的系統,該系統硬件部分包括檢測車輛、線激光3D相機、支架、吸盤、觀測相機、距離傳感器、PLC、電腦,其中線激光3D相機、觀測相機通過支架和吸盤安裝在檢測車輛之上,線激光3D相機用于投射線激光到待檢測護欄的表面并在表面形成激光輪廓線,而3D相機中的CMOS圖像傳感器則會對護欄表面的激光輪廓線信息進行捕捉和收集,這些激光輪廓數據進一步傳輸至電腦上,經過配套軟件的處理即可獲得護欄激光輪廓的坐標信息。同時,線激光3D相機所發出的線激光還會進一步投射到地面以及路緣石上,與投射到護欄表面的線激光相同,投射到地面以及路緣石上的激光輪廓線信息也會被記錄和傳輸。觀測相機則用于拍攝護欄以及周邊環境的實景照片,并且距離傳感器觸發觀測相機和線激光3D相機同步采樣,從而保證二者所對應的公路里程樁號一致。
3.3 梁板中心高度快速檢測系統的軟件
為實現對線激光3D相機所獲得的護欄梁板、地面及路緣石激光輪廓信息的處理,該文還開發了與硬件相配套的軟件。線激光3D相機和觀測相機所采集的圖像和信息通過網絡被發送到電腦的配套軟件之中,配套軟件包括數據處理界面程序和AI分類程序,其中數據處理界面程序用以加載原始數據、處理數據、導出數據和修改參數,AI分類程序用于識別護欄波形梁板的類型。其中,AI分類程序在視覺算法上結合了傳統視覺算法與深度學習視覺算法,傳統視覺算法部分負責對護欄激光輪廓圖像進行預處理,去除特異的雜點,進行模板匹配,即進行梁板和路緣石的匹配、計算;深度學習視覺算法部分則用于對護欄梁板進行分類,深度學習視覺算法使用ResNet50網絡進行訓練,同時使用TensorRT的16位推理引擎進行推理,進而可以經過分析得到護欄梁板的類型為兩波形或三波形。
4 梁板中心高度快速檢測系統檢測結果分析
4.1 護欄梁板中心高度檢測流程
該梁板中心高度快速檢測系統的硬件與軟件協同工作,其工作的主要流程:檢測車輛搭載線激光3D相機、觀測相機等在車道上正常行駛,檢測車輛開始行駛后,即帶動距離傳感器開始工作,距離傳感器向PLC發送信號,PLC進一步向電腦發送信號,電腦控制線激光3D相機采集護欄、路面及路緣石激光輪廓數據,并控制觀測相機采集護欄、路面及路緣石的觀測圖像。然后電腦對采集的激光輪廓數據和觀測圖像進行保存。通過線激光3D相機和觀測相機獲得激光輪廓數據和觀測圖像之后,再通過配套軟件對數據進行處理。配套軟件分析處理數據的具體流程:首先讀取本地的激光輪廓數據,并且AI分類程序構建一幅護欄輪廓的剖面圖,然后再由AI分類程序進行圖像預處理,去除激光輪廓圖像中的雜點,再將靠近線激光3D相機一側的路面激光輪廓線作為路面基準線,進行圖像旋轉,同時AI分類程序根據波形梁梁板和路緣石的模板文件,進行模板匹配,找到對應部位的圖像位置,將對應部位的圖像截取下來,利用深度學習分類網絡,將波形梁圖像劃分為兩波形、三波形梁板,至此即可完成對公路護欄梁板類型的劃分。
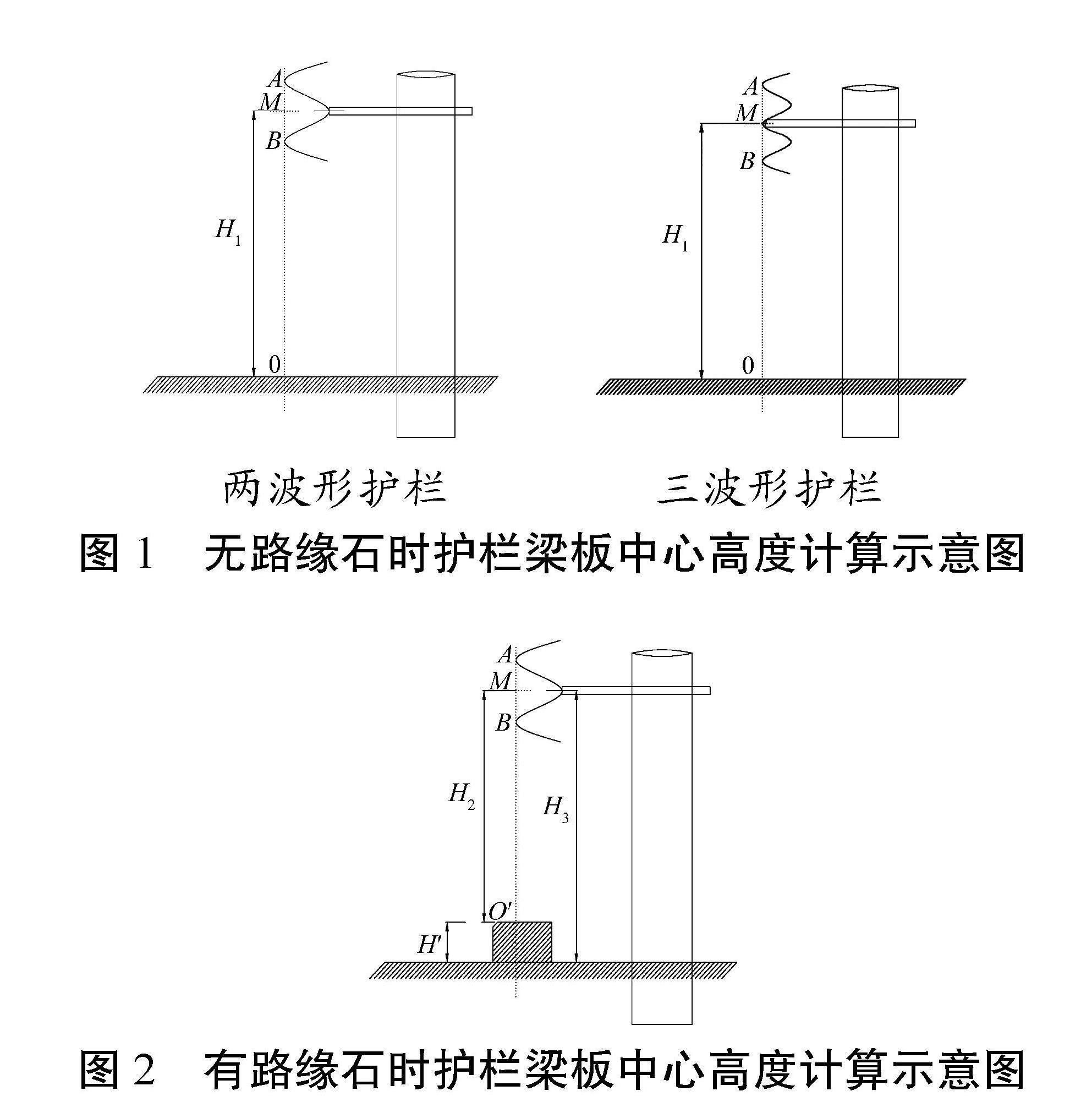
由于線激光3D相機所采集的護欄激光輪廓數據包含了各個點的空間坐標信息,利用AI分類程序可得到梁板上部和下部波峰A和B的坐標信息,如圖1所示,AB所在直線與路面基準線的交點為O(x2, y2, z2),AB所構成的線段的中點為M(x1, y1, z1),如式(2)所示,M與O之間的歐式距離即為梁板的中心離地高度H1。同時,根據軟件中所儲存的路緣石模板,AI分類程序可以判斷是否存在路緣石,如檢測路段沒有路緣石,則護欄梁板中心離地高度為梁板中心點與所述交點之間的歐式距離H1。
(2)
如果存在路緣石,將路緣石頂面激光輪廓線作為路緣石基準線,并進行圖像旋轉,如圖2所示,AB所在直線與路緣石基準線所在直線的交點為O',M與O'之間的距離即為護欄梁板的中心離地高度H2,再通過對路緣石的激光輪廓信息進行分析即可得到路緣石高度H',如式(3)所示,此時護欄梁板的中心離地高度H2為梁板中心距離路面的距離H3減去路緣石的高度H'。該文之所以采用式(3)計算存在路緣石的情況下護欄梁板中心高度,是因為路緣石頂面寬度一般在100~150 mm之間,激光在路緣石上的投影長度相較于路面和護欄更短,實際所獲取的路緣石頂面激光輪廓數據往往較為零散,故通過算法對零散的數據進行處理和擬合以得到路緣石頂面距離地面的距離。而由于地面和護欄激光輪廓數據較為完整,因此護欄梁板中心距離地面距離的計算結果誤差較小,故采用式(3)的計算方式能夠減少誤差的傳遞。
H2=H3?H' (3)
4.2 檢測結果分析
4.2.1 對比實驗結果分析
為檢測該文的梁板中心高度快速檢測系統檢測結果的精度,選取了100 m的測試路段,與傳統尺量的檢測結果進行對比。對于尺量檢測,按照傳統檢測方式獲得護欄梁板中心高度數據。對于車載式快速檢測,首先啟動計算機處理系統和橫梁中心高度測量裝置電源,打開控制系統軟件,檢查確認控制系統軟件中各項功能和技術參數狀態正常。然后在控制系統軟件上輸入待測路段信息,檢測系統開始自動測量護欄橫梁中心高度及實時記錄對應樁號。在對比實驗中,檢測車輛分別以30 km/h、50 km/h、80 km/h速度行駛,以測試在不同速度下檢測系統檢測結果的穩定性,人工測試與快速檢測系統檢測結果對比情況如圖3所示。從圖3中不難發現,通過人工檢測所獲得的檢測數據與利用梁板中心高度快速檢測系統所測得的結果基本一致,由此表明快速檢測系統的檢測精度與人工檢測基本相同,且快速檢測系統的檢測結果不受檢測車輛行駛速度的影響,在80 km/h以內行駛能夠獲得相同的檢測結果。
4.2.2 工程檢測結果分析
為進一步了解該檢測系統在長距離、復雜環境下的檢測效果,選取了G4217蓉昌高速(成灌段)K11+137~
K31+137共計20 km路段進行現場檢測,檢測過程中,檢測車輛以90~120 km/h的速度行駛,選取其中K23+840
~K25+000路段的檢測數據進行分析,該段護欄中心高度檢測結果如圖4所示。通過對快速檢測系統的檢測結果進行分析,該路段均為兩波形護欄,護欄梁板中心高度在600±20 mm范圍內。如圖5所示,為K23+544處的檢測結果,不難發現此時觀測相機所顯示的現場情況為水泥護欄,同時相應的護欄高度檢測結果也為0,此外,針對其他檢測結果為0的情況,通過對比觀測相機所采集的現場照片,發現對應位置基本為水泥護欄、無護欄或受到植物遮擋的情況。通過工程檢測結果不難發現,梁板中心高度快速檢測系統在長距離、復雜環境的條件下也能夠獲得較為準確的檢測結果,且檢測車輛的行駛速度對于檢測結果未造成嚴重影響,檢測車輛最高行駛速度可以達到120 km/h。
圖5 K23+544檢測結果
5 結語
在該文的研究中,首先明確了波形梁鋼護欄梁板中心高度傳統人工檢測以及其他檢測方式所存在的不足之處,然后基于3D相機成像技術研究和設計了公路波形梁鋼護欄梁板中心高度快速檢測系統。最后通過與傳統人工檢測結果進行對比,發現檢測系統的檢測結果與人工檢測結果吻合度較高,同時將該檢測系統應用于高速公路的護欄高度檢測之中,通過對檢測結果進行分析發現該系統在高速、復雜環境下也能夠有效實現對護欄梁板中心高度的檢測,因此驗證了該系統用于波形梁鋼護欄梁板中心高度快速檢測的可行性。
參考文獻
[1]王洋, 郭杜杜, 王慶慶, 等. 基于改進DeepLabV3+的無人機高速公路護欄檢測[J]. 激光與光電子學進展, 2024
(4): 240-248.
[2]公路交通安全設施設計細則: JTG/T D81—2017[S]. 北京:人民交通出版股份有限公司, 2017.
[3]公路工程質量檢驗評定標準(第一冊 土建工程): JTG F80/1—2017[S]. 北京:人民交通出版股份有限公司, 2017.
[4]陳隆. 線激光3D相機軟件關鍵技術研究與實現[D]. 南京:南京郵電大學, 2022.
[5]白佳迪. 基于線結構光掃描的高速公路護欄板參數檢測系統[D]. 西安:長安大學, 2023.
[6]楊曼, 黨倩, 萬劍. 基于機器視覺的公路護欄狀態智能監測系統[J]. 中國交通信息化, 2023(S1): 250-254.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34