三維角色運動重定向研究綜述
2024-06-17 04:01:31劉春林張燕
軟件工程 2024年6期
劉春林 張燕
摘?要:
在計算機圖形學中,角色運動重定向技術對于骨骼動畫的廣泛應用具有重要意義。為了便于人們了解已有的三維角色運動重定向研究成果并引發進一步的研究,文章首先簡要介紹了骨骼動畫技術與運動重定向;其次回顧了已有的運動重定向技術,并將其歸納為3類方法,通過對每一類方法進行分析,得出了現有研究在非人形角色和拓撲異構角色之間的運動重定向還很薄弱的結論;最后針對目前研究中存在的問題,展望了未來研究工作的主要方向。
關鍵詞:三維角色;骨骼動畫;運動重定向
中圖分類號:TP391??文獻標志碼:A
0?引言(Introduction)
骨骼動畫是應用最廣泛的角色動畫表示方式,在視頻游戲、虛擬現實及動畫電影等作品中都有廣泛應用。但是,骨骼動畫的動作與骨架具有強耦合關系,一個動作通常只能在一個骨架上播放,導致許多重復的動畫制作勞動,而運動重定向(Motion?Retargeting)則可以很好地解決這一問題。運動重定向是一種將骨骼動畫從原骨架遷移到另一個不同骨架的技術。為了驅動不同的角色,設計人員常常需要構建各部分比例不同的骨骼,有時甚至是拓撲結構也不同的骨骼。運動重定向是計算機圖形學中一個重要的研究課題,目前已經取得了豐碩的成果,但仍然存在許多問題尚待解決。為了便于人們了解該領域已有的研究成果并引發進一步的研究,本文總結了主要的角色運動重定向研究成果,并分析了現有研究存在的問題,提出了未來的研究方向。
1?骨骼動畫(Skeletal?animation)
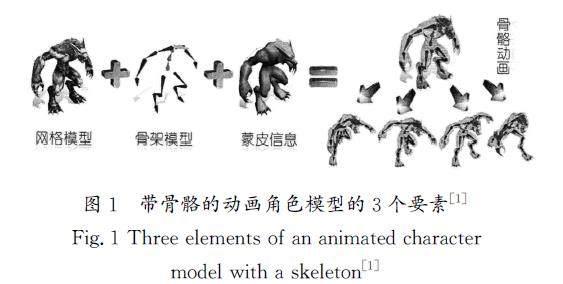
在現有的文獻中,骨骼動畫技術最早可追溯到Magnenat\|Thalmann等在1989年的一項研究。該技術通過將三維模型表面網格的頂點關聯到骨架結構,借助骨架的運動驅動網格的變形,從而實現模型的動畫效果。一個帶骨骼的動畫角色模型至少包括3個要素(圖1):(1)表示角色形狀的表面網格(Mesh);(2)骨架(Skeleton)以及表示骨架和表面網格頂點關聯信息的蒙皮(Skin);(3)基于骨架的運動序列(Motion),其中,骨架的運動序列即骨骼動畫。
骨架由模型中的一系列關節組成,這些關節相互連接形成一棵樹,樹的節點即關節,樹的邊即骨骼,樹的根節點即根關節,一般取靠近角色中心的關節作為根關節。骨架的每個關節具有位置、朝向和縮放等幾何屬性,所以它定義了一個局部坐標系。除根關節外,其他關節定義在其父關節的局部坐標系中,會隨著其父關節的運動而運動。一個關節的全局位置和朝向是由其自身的局部位置和朝向及其所有祖先關節的局部位置和朝向共同決定的,由一個關節及其所有祖先關節的局部位置和朝向計算其全局位置和朝向的過程即正向運動學(Forward?Kinematics);反之,由一個關節的全局位置決定其自身及其所有祖先關節的局部位置和朝向的過程即反向運動學(Inverse?Forward?Kinematics)。
骨骼模型中,骨架是不可見的,可見的部分是皮膚。皮膚與普通網格模型的區別在于它需要隨著骨架的關節運動而運動,所以需要與骨架的關節建立關聯關系,這是通過皮膚的頂點實現的。皮膚的頂點除了具有位置、法線、紋理坐標等普通網格模型的頂點具有的屬性,還需要存儲與其關聯的關節及關聯的權重。與一個頂點關聯的關節可以不止一個,但與所有關聯關節的關聯權重之和為1。為網格模型的所有頂點指定關聯關節和關聯權重的過程即蒙皮(Skinning),在三維建模軟件中有專門的工具完成此過程。
2?運動重定向(Motion?retargeting)
將運動重定向技術按照源動畫和目標動畫表演者之間的差異分為以下3類:拓撲相同運動重定向、拓撲異構運動重定向、計算機木偶動畫。
2.1?拓撲相同運動重定向
拓撲相同運動重定向是針對骨架拓撲結構相同但各部分比例可能不同的角色間的運動重定向。由于拓撲結構相同,所以此類方法隱含的假設源骨架中每個關節到目標骨架中每個關節的一一對應關系是已知的,從而源骨架每個關節的動畫軌跡可以直接拷貝到目標骨架對應的關節,它們要解決的主要問題是由骨架各部分大小比例的不同導致的動畫變形失真。
1998年,GLEICHER[2]在其開創性研究中提出了運動重定向問題,并且將此問題形式轉換為一個帶時空約束的優化問題,尋求一個滿足約束條件的最優目標動畫:
minimize?g(x)?subject?to?f(x)=c
其中:g(x)代表優化的目標函數,表示源動作和目標動作之間的距離;g(x)=∫t〖DD)〗(]m(t)-m0(t)[JB>2)]2=∫t[DD)]b(t,x)2,m是目標動作,m0是源動作,b(t,x)是三次B樣條函數,x是控制點,以三次B樣條曲線參數化源動作和目標動作之間的差距,目的是使目標動作更平滑;f(x)=c代表時空約束。此方法中,主要使用時空約束表達對目標動畫的要求,保留源動畫中的一些重要特性。羅忠祥等[3]對時空約束優化方法開展了進一步的研究,并將其應用到對運動捕獲數據的編輯和重定向中。
CHOI等[4]提出一種基于逆向運動學(Inverse?Kinematics,IK)的運動重定向方法,該方法利用雅可比矩陣的零空間同時實現末端效應器的軌跡跟蹤和整個骨架對源動畫的模擬。徐少帥[5]對基于IK的運動重定向方法開展了進一步的研究,重點解決運動與地形出現的交互問題。
HUANG等[6]認為角色關節的參數是根據姿態動態變化的,不能通過預先設定的值準確表達。他們提出一種方法,即從一組動畫片段中提取每個姿態下的關節參數,并將它們按照對應姿態下末端效應器的位置存儲到一棵八叉樹中。這些參數在后續的IK過程中會被用到。動畫重定位包括以下4個步驟。
(1)對末端效應器軌跡中的每個位置,從八叉樹中取出相應的關節參數,然后運行一個IK解算目標骨骼的姿態,所有的IK是并行運行的。
(2)運行一遍時間對齊濾波平滑動畫。
(3)與第一個步驟類似,但是IK的開始姿態是前一步計算出的姿態。
(4)再運行一次濾波平滑動畫。
JIN等[7]提出一種用于多角色交互動畫的運動重定向方法,該方法主要關注多角色交互動畫中角色間相互接觸位置關系的保留;他們提出了“氛圍網格(Aura?Mesh)”的概念,這是一種圍繞在角色周圍,占據角色交互空間的四面體表面網格(Tetrahedral?Mesh)。角色交互動畫中氛圍網格的碰撞點被當成是交互位置關系記錄下來,并且作為一種約束用在后面的運動重定向中。
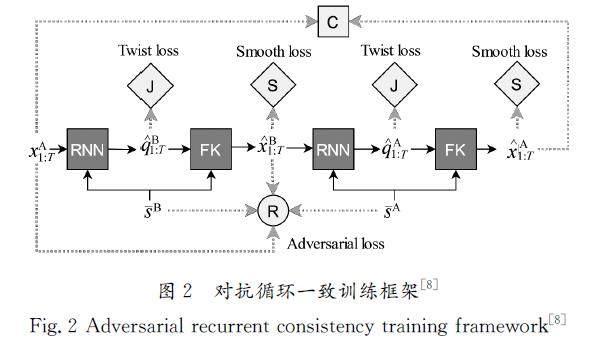
VILLEGAS等[8]開創性地提出了一種基于深度學習的運動重定向方法。他們使用一個編碼RNN(Recurrent?Neural?Networks)捕捉輸入動畫中的高層次屬性,并將其轉換為一種隱式編碼,然后用一個解碼RNN進行解碼,進而得到與目標骨骼適配的新動畫。該網絡采用無監督學習方式進行訓練,其損失函數中,除了通常的正則化項,還包括對抗訓練損失和循環一致性損失。對抗訓練損失用于最小化重定向動畫的關節運動速度與源動畫的關節運動速度之間的差異;循環一致性損失用于確保重定向動畫與源動畫盡可能相似,它能夠確保A角色的動畫重定向到B角色再重定向回來,使得到的動畫和原動畫盡可能地接近(圖2)。
LIM等[9]提出的方法和VILLEGAS等[8]提出的方法具有一定的相似性,但也有兩個差異:一是在每一個時間步中根骨骼的動畫被單獨進行重定向,再與其他部分合并;二是循環一致性損失被替換成重定向到自身產生的重構損失。
KIM等[10]堅持認為CNN(Convolution?Neural?Networks)比RNN更適合運動重定向任務,因為它能更好地捕獲動作的短期依賴,而這種依賴極大地影響了任務的表現。所以,他們的方案依賴于一個具有時間空洞卷積的純卷積網絡,該網絡在一個批次中重定向整個運動序列。
UK等[11]提出的運動重定向方法基于一個深度變分自動編碼器。這個自動編碼器結合了深度卷積逆向圖網絡(DC\|IGN)和U\|Net。其中,DC\|IGN用于分解身體各部分的運動,而U\|Net用于保留原始運動的細節。
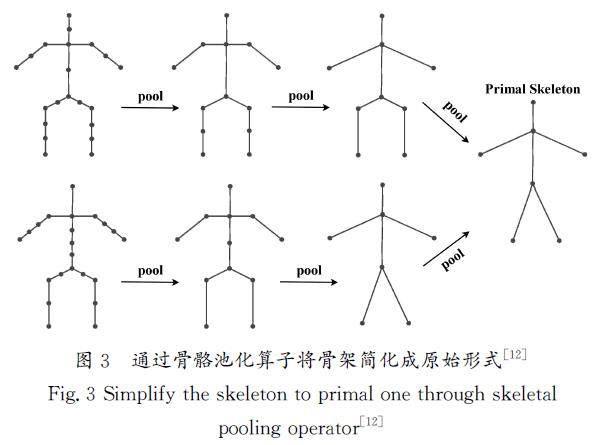
ABERMAN等[12]提出了一種深度學習的方法,可以在拓撲結構不同但同胚的骨架間進行運動重定向。他們提出了一種骨骼池化算子,可以在基于骨架的圖卷積網絡中將骨架簡化成原始骨架(Primal?Skeleton),再通過卷積與反池化將原始骨架變為另一骨架,從而實現動畫的遷移(圖3)。該方法同樣通過循環一致性檢驗和對抗訓練實現無監督學習。此方法較好地解決了同胚的骨架間的運動重定向,但是對于拓撲不同的每一對骨架都需要訓練一個專門的網絡。
保留肢體運動中與自身的接觸關系并防止肢體與身體其他部位相互穿透是運動重定向中的一大難題。VILLEGAS等[13]提出了一種基于隱空間優化的運動重定向方法解決以上問題。ZHANG等[14]提出的方法基于一個殘差網絡,其中包括一個骨架感知模塊用于保留源動畫的語義,一個形狀感知模塊用于保留自身接觸和減少肢體與身體其他部位相互穿透。
2.2?拓撲異構運動重定向
拓撲異構運動重定向能夠將運動重定向到拓撲結構不同的角色上,但是大多數方法都需要用戶指定骨架各部分的語義或者手動建立源骨架和目標骨架的對應關系。
MONZANI等[15]提出了一種使用中間骨架和IK的運動重定向方法。中間骨架通過用戶手動制定的源骨架和目標骨架的對應關系建立。源骨架的運動數據通過中間骨架重定向到目標骨架上,然后用IK強制一些約束條件。此方法不是全自動的,源骨架和目標骨架的對應關系需要用戶手動制定。謝文軍等[16]提出一種面向兩足和四足角色的分層骨架匹配方法,實現了源骨架和中間骨架的自動匹配。該方法通過分析多種幾何、拓撲參數,評估骨架關節的重要性和可區分度,從而將骨架關節分為3個層次,然后對每個層次的節點選取合適的參數組合,并結合中間骨架所提供的語義信息匹配各層節點。
KULPA等[17]提出了一種與角色形態無關的動作表示方式。他們使用歸一化骨架和動作約束來存儲動作。歸一化骨架可將動作姿態表示為與身體尺寸和比例無關的形式,動作約束用來表示動作的內在約束,比如腳與地面接觸的約束。他們將這種動作表示方式用于動作重定向。首先使用一種半自動的方式將角色動畫轉換為上述動作表示方式;其次在運行時實時地將這種與形態無關的動作數據適配到目標角色上。這種方法只適用于骨骼各部分語義明確的人形角色。
BACIU等[18]在研究的運動重定向方法中提出了一種叫作運動控制網絡(Motion?Control?Net,?MCN)的數據結構。對于每一對源骨架和目標骨架,用戶需要手動為它們建立一個運動控制網絡,并在其中定義源骨架到目標骨架的關節對應關系。該方法首先將源動畫數據轉換為控制網格角度的形式,其次通過運動控制網絡將其映射到目標骨骼,最后將目標骨骼上的控制網格角度轉換為動畫數據。由于需要用戶手動建立運動控制網格,所以此方法不是全自動的。
HECKER等[19]發明了一種方法,將角色運動記錄成一種和形態無關的形式,這種形式的動畫可以在由研究人員提供的編輯器里創建出的角色上播放,這些角色可以具有非常豐富的形態。他們在一款叫“孢子”的游戲中成功應用了這種技術。但是,應用這種技術的角色運動和角色都只能在編輯器里按照特定的規則創建,并不能將動作重定向到通常的骨骼模型上。
骨架自動映射是拓撲異構角色間運動重定向的難點,BHARAJ等[20]提出了一種骨架自動映射的方法。該方法將源骨架和目標骨架各自分解成一組從葉關節到根關節的關節鏈。將源骨架的每一條關節鏈與目標骨架的所有關節鏈匹配,并選擇匹配代價最小的關節鏈作為最終匹配。該方法沒有使用骨架的蒙皮網格信息,并且無法確保滿足對稱匹配約束和體系結構匹配約束,當兩個骨架姿態不同或拓撲差異較大時,容易導致不恰當的匹配。
FENG等[21]提出了一種人形角色的動作重定向方法。首先,研究人員使用一組啟發式的方法根據關節名字建立源關節和目標關節的對應關系。其次,根據這種對應關系對齊目標骨架和源骨架的T\|pose以及目標關節與源關節的局部坐標系,再將每個關節的動畫參數直接拷貝到目標關節。最后,使用IK強制一些約束被遵守,比如腳步觸地約束。唐琛[22]對上述方法進行了進一步的研究,使用了不同的關節映射方法。
ABDUL\|MASSIH等[23]提出了一種角色運動風格重定位的方法。該方法需要用戶手動在每個骨架上定義一些代表身體部位的關節組,稱為身體部位組(GBP),并且要指定源骨架和目標骨架的身體部位組的對應關系。源部位組上的屬性通過此對應關系傳送到對應的目標部位組上,并且作為約束加入對目標動畫的一個優化過程中,從而得到最終風格化的運動。但是,此方法也不是全自動的。
2.3?計算機木偶動畫
計算機木偶動畫(Computer?Puppetry)通過動作捕捉系統將真實表演者的動作實時映射到計算機虛擬角色上,這是一種特殊的運動重定向。
SHIN等[24]提出了一種方法將表演者的動畫實時映射到虛擬卡通角色上。該方法采用了一種末端效應器動態重要性的概念,根據末端效應器和周圍環境的距離計算每一幀的重要性程度,從而決定表演者動作的哪些方面應該被保留到結果動作中。末端效應器的位置及其重要性作為參數,被用在一個混合的IK解析器中得出最終的角色姿態。該方法能將動畫重定向到拓撲結構相同但身體各部分比例不同的虛擬角色上。
DONTCHEVA等[25]開發的系統通過一個動畫道具的運動合成虛擬角色的動作。該系統介紹了一種方法可以推斷動畫道具的運動和虛擬角色動作之間的隱含關系,該方法使用CCA(Canonical?Correlation?Analysis)分析一個角色的動作和模擬這個角色動作某些方面的道具運動,從而建立這個道具運動和對應角色動作之間一些特征的線性映射關系。使用此映射關系,用戶就可以通過道具的運動改變角色的動作。
YAMANE等[26]推出了一種方法用來將人類表演者的動作重定向到非人形虛擬角色上。該方法使用動捕標記的位置作為輸入,虛擬角色的每個骨骼也由骨骼上設定的3個虛擬標記的位置代表。該方法采用共享高斯過程潛變量模型(Shared?Gaussian?Process?Latent?Variable?Models,Shared?GPLVM)的統計模型將表演者的姿態映射到虛擬角色姿態。該模型使用一小組關鍵姿態對訓練而成,每個姿態對包括一個表演者姿態和一個相應的虛擬角色姿態。該方法還包括一個基于物理的優化過程,用以改善目標動作的物理真實感。
SEOL等[27]也提出了一種非人形角色的木偶動畫。研究人員使用兩種方法將表演者的姿態轉換為目標角色的姿態。第一種方法是直接特性映射,即直接將輸入姿態參數線性映射到輸出姿態參數;第二種方法是基于SVM的姿態歸類,即將輸入姿態匹配到一個訓練時給定的目標姿態。這兩種方法都是預先通過一些相互匹配的動作對訓練而成的,它們的輸出經過混合后得到最終的目標姿態。該方法的輸入為表演者身上的15個點,輸出為虛擬角色上的一組控制把手。
MOLLA等[28]提出的方法可以將表演者的動作映射到人形虛擬角色上。該方法主要關注源動作在重定向過程中身體自身接觸關系和身體部位空間次序的保留,它利用姿勢的自我中心表示,將每個肢體關節位置表示為相對于其他身體部位的相對向量的加權和(自我中心坐標),并定義每對身體部位之間的分離平面(自我中心平面)。該方法需要用戶手動在表演者和虛擬角色上標記一些對應點。
3?研究展望(Research?prospect)
經過多年的研究,運動重定向技術在某些特定的情景下獲得了比較好的效果,但仍然存在許多問題。一方面,大多數研究都將人形角色或拓撲相同的角色作為主要研究對象,也取得了很多成果。人形角色基本實現了自動化、高質量的運動重定向[13\|14];另一方面,對非人形角色及拓撲異構的角色間的運動重定向的研究很少,并且都沒能實現自動化[15,17\|18]。一方面是因為非人形角色的形態千變萬化,骨骼語義和關節參數很難獲取;另一方面是因為拓撲異構的骨架間關節的映射關系很難自動建立,有時甚至手動建立關聯也很困難。
最新的研究大多采用基于深度學習的方法。這些方法通過學習大量的動作,獲取動作與骨骼無關的高級特征,這些特征可以指導如何把動作從一個骨架遷移到另一個骨架。相比于傳統方法,深度學習的方法得到的重定向動畫更自然和平滑,缺點是需要大量的數據訓練模型,而且訓練時間很長。此外,由于神經網絡通常具有固定的結構,它在處理具有復雜結構且大小可變的骨架和動作數據時,常常非常困難。所以,目前的方法對可重定向動作的骨架具有嚴格的要求,大多數要求具有相同的拓撲結構或者要求拓撲同胚,而且對于每一個不同的骨架,都需要訓練一個專門的網絡進行動作重定向,在多數應用場景下都是難以接受的。
未來的研究應該著重于非人形角色和拓撲異構的角色間的運動重定向,特別是拓撲異構的骨架間關聯關系的建立,這是一個具有挑戰性的研究課題。為了克服深度神經網絡與骨架拓撲的強耦合關系,可將傳統的方法比如基于優化的方法和反向運動學方法等結合應用。
4?結論(Conclusion)
角色運動重定向是計算機圖形學中的一個重要研究課題。本文回顧了目前出現的主要運動重定向技術,歸納出拓撲相同運動重定向、拓撲異構運動重定向和計算機木偶動畫3類方法,分析了每一類方法的優勢與不足,并對當前的研究難點和未來的研究方向進行了闡述,希望能夠為三維角色運動重定向研究領域構建一個較為完整的全景圖,以便為相關研究人員提供參考和借鑒。
參考文獻(References)
[1]?陸勁挺.?類人角色的多源運動重定向[D].?合肥:合肥工業大學,2014.
[2]?GLEICHER?M.?Retargetting?motion?to?new?characters[C]∥ACM?SIGGRAPH.?Proceedings?of?the?25th?annual?conference?on?Computer?graphics?and?interactive?techniques.?New?York:ACM?Press,1998:33\|42.
[3]?羅忠祥,莊越挺,劉豐,等.?基于時空約束的運動編輯和運動重定向[J].?計算機輔助設計與圖形學學報,2002,14(12):1146\|1151.
[4]?CHOI?K?J,KO?H?S.?On\|line?motion?retargetting[C]∥IEEE.?Proceedings?of?the?IEEE:Seventh?Pacific?Conference?on?Computer?Graphics?and?Applications.?Piscataway:IEEE,1999:32\|42.
[5]?徐少帥.?基于反向運動學的運動重定向研究[D].?大連:大連理工大學,2018.
[6]?HUANG?J,FRATARCANGELI?M,DING?Y,et?al.?Inverse?kinematics?using?dynamic?joint?parameters:inverse?kinematics?animation?synthesis?learnt?from?sub\|divided?motion?micro\|segments[J].?The?visual?computer,2017,33(12):1541\|1553.
[7]?JIN?T,KIM?M,LEE?S?H.?Aura?mesh:motion?retargeting?to?preserve?the?spatial?relationships?between?skinned?characters[J].?Computer?graphics?forum,2018,37(2):311\|320.
[8]?VILLEGAS?R,YANG?J?M,CEYLAN?D,et?al.?Neural?kinematic?networks?for?unsupervised?motion?retargetting[C]∥IEEE.?Proceedings?of?the?IEEE:2018?IEEE/CVF?Conference?on?Computer?Vision?and?Pattern?Recognition.?Piscataway:IEEE,2018:8639\|8648.
[9]?LIM?J,CHANG?H?J,CHOI?Y?C.?PMnet:learning?of?disentangled?pose?and?movement?for?unsupervised?motion?retargeting[C]∥British?Machine?Vision?Association.?British?Machine?Vision?Conference.?Cardiff,United?Kingdom:BMVA,2019:196.
[10]?KIM?S,PARK?I,KWON?S,et?al.?Motion?retargetting?based?on?dilated?convolutions?and?skeleton\|specific?Loss?functions[J].?Computer?graphics?forum,2020,39(2):497\|507.
[11]?UK?KIM?S,JANG?H,KIM?J.?A?variational?U\|Net?for?motion?retargeting[J].?Computer?animation?and?virtual?worlds,2020,31(4\|5):e1947.
[12]?ABERMAN?K,LI?P?Z,LISCHINSKI?D,et?al.?Skeleton\|aware?networks?for?deep?motion?retargeting[J].?ACM?transactions?on?graphics,2020,39(4):62.
[13]?VILLEGAS?R,CEYLAN?D,HERTZMANN?A,et?al.?Contact\|aware?retargeting?of?skinned?motion[C]∥IEEE.?Proceedings?of?the?IEEE:2021?IEEE/CVF?International?Conference?on?Computer?Vision?(ICCV).?New?York:IEEE,2021:9700\|9709.
[14]?ZHANG?J?X,WENG?J?W,KANG?D,et?al.?Skinned?motion?retargeting?with?residual?perception?of?motion?semantics?&?geometry[C]∥IEEE.?Proceedings?of?the?IEEE.?2023?IEEE/CVF?Conference?on?Computer?Vision?and?Pattern?Recognition?(CVPR).?New?York:IEEE,2023:13864\|13872.
[15]?MONZANI?J?S,BAERLOCHER?P,BOULIC?R,et?al.?Using?an?intermediate?skeleton?and?inverse?kinematics?for?motion?retargeting[J].?Computer?graphics?forum,2000,19(3):11\|19.
[16]?謝文軍,陸勁挺,劉曉平.?語義中間骨架驅動的自動異構運動重定向[J].?計算機輔助設計與圖形學學報,2016,28(5):750\|762.
[17]?KULPA?R,MULTON?F,ARNALDI?B.?Morphology\|independent?representation?of?motions?for?interactive?human\|like?animation[J].?Computer?graphics?forum,2005,24(3):343\|351.
[18]?BACIU?G,IU?B?K?C.?Motion?retargeting?in?the?presence?of?topological?variations:research?articles[J].?Computer?animation?and?virtual?worlds,2006,17(1):41\|57.
[19]?HECKER?C,RAABE?B,ENSLOW?R?W,et?al.?Real\|time?motion?retargeting?to?highly?varied?user\|created?morphologies[J].?ACM?transactions?on?graphics,2008,27(3):1\|11.
[20]?BHARAJ?G,THORMHLEN?T,SEIDEL?H?P,et?al.?Automatically?rigging?multi\|component?characters[J].?Computer?graphics?forum,2012,31(2pt4):755\|764.
[21]?FENG?A,HUANG?Y?Z,XU?Y?Y,et?al.?Fast,automatic?character?animation?pipelines[J].?Computer?animation?and?virtual?worlds,2014,25(1):3\|16.
[22]?唐琛.?三維角色動畫中運動重定向技術的研究與實現[D].?成都:電子科技大學,2013.
[23]?ABDUL\|MASSIH?M,YOO?I,BENES?B.?Motion?style?retargeting?to?characters?with?different?morphologies[J].?Computer?graphics?forum,2017,36(6):86\|99.
[24]?SHIN?H?J,LEE?J,SHIN?S?Y,et?al.?Computer?puppetry:an?importance\|based?approach[J].?ACM?transactions?on?graphics,200120(2):67\|94.
[25]?DONTCHEVA?M,YNGVE?G,POPOVIC[DD(-1]'[DD)]?Z.?Layered?acting?for?character?animation[J].?ACM?transactions?on?graphics,2003,22(3):409\|416.
[26]?YAMANE?K,ARIKI?Y,HODGINS?J.?Animating?non\|humanoid?characters?with?human?motion?data[C]∥ACM.?SIGGRAPH.?Proceedings?of?the?2010?ACM?SIGGRAPH/Eurographics?Symposium?on?Computer?Animation.?New?York,USA:ACM?Press,2010:169\|178.
[27]?SEOL?Y,O′SULLIVAN?C,LEE?J.?Creature?features:online?motion?puppetry?for?non\|human?characters[C]∥ACM?SIGGRAPH.?Proceedings?of?the?12th?ACM?SIGGRAPH/Eurographics?Symposium?on?Computer?Animation\|SCA′13.?New?York:ACM,2013:213\|221.
[28]?MOLLA?E,DEBARBA?H?G,BOULIC?R.?Egocentric?mapping?of?body?surface?constraints[J].?IEEE?transactions?on?visualization?and?computer?graphics,2018,24(7):2089\|2102.
作者簡介:
劉春林(1981\|),男,碩士,軟件工程師。研究領域:計算機圖形學,游戲開發。
張?燕(1968\|),女,博士,教授。研究領域:計算機圖形學,人工智能。本文通信作者。