基于3D穿梭車的活立方密集倉儲系統及存取貨調度研究
2024-06-21 19:02:48熊依蓓馬云峰盧陽
物流科技 2024年10期
熊依蓓 馬云峰 盧陽

摘 要:為滿足新時代自動化密集倉儲系統的需求,在保持高倉儲密度的同時,也需重視系統的靈活性與高效性。因此,結合活立方密集倉儲系統的多倍深存儲和3D穿梭車倉儲系統中的六向移動技術,提出以三維自主移動穿梭車為核心的活立方密集倉儲系統。針對該系統中的存取貨調度問題,建立了基于整數規劃的三維網絡流模型。為比較倉儲密度相同時,包含提升機的傳統活立方密集倉儲系統與以三維自主移動穿梭車為核心的活立方密集倉儲系統在存取貨效率方面的性能,在不同系統配置下通過大量算例進行了數值實驗,結果表明:以三維自主移動穿梭車為核心的活立方密集倉儲系統在存取貨時間上平均節省30%,系統效率有著較為顯著的提高;模型在不同系統配置下均具有良好的求解性能,驗證了三維網絡流模型的有效性與通用性。
關鍵詞:自動化密集倉儲系統;活立方密集倉儲系統;穿梭車式倉儲系統;網絡流模型;存取貨調度模型
中圖分類號:F253;TH24文獻標志碼:ADOI:10.13714/j.cnki.1002-3100.2024.10.014
Abstract: In order to meet the needs of the new era of automated compact storage systems, while maintaining high storage density, it is also necessary to pay attention to the flexibility and efficiency of systems. Therefore, combining the multi-deep storage of Live-Cube Compact Storage System and the six-way moving technology in 3D shuttle-based storage system, Live-Cube Compact Storage System with 3D autonomous mobile shuttles as the core is proposed. For the access scheduling problem in the system, a 3D Network Flow model based on integer planning is established. To compare the performance of traditional Live-Cube Compact Storage System with an elevator and Live-Cube Compact Storage System with 3D autonomous mobile shuttles as the core in terms of storage and retrieval efficiency when the storage density is the same, numerical experiments are carried out with a large number of instances in different system configurations. The results show that: Live-Cube Compact Storage System with 3D autonomous mobile shuttles as the core saves an average of 30% in storage and retrieval time, and the system efficiency has been significantly improved; the model has a good performance under different system configurations, which verifies the validity and versatility of the 3D Network Flow model.
Key words: automated compact storage system; Live-Cube Compact Storage System; shuttle-based storage system; Network Flow model; access scheduling model
0? ? 引? ? 言
倉庫在任何供應鏈中都是至關重要的節點。隨著貿易的增加,在許多地區,倉庫的數量和倉儲所占空間迅速增加[1],但可用于建造倉庫的土地資源(特別是靠近需求點的)已經變得稀缺[2]。于是,具有高空間利用率的密集倉儲系統被提出。與普通立體倉儲系統相比,密集倉儲系統的土地利用率和空間利用率可提高20%~100%左右,同時作業效率可提高20%,運行能耗可降低30%,單元投資成本可節約10%左右[3]。目前,密集倉儲系統越來越受到行業關注,發展前景廣闊[3]。
穿梭車是密集倉儲系統中的重要自動化搬運設備[4],通過與上位機、WMS系統通信或通過手持終端控制,結合電子標簽、條形碼等技術即可實現自動識別和自動存取功能,完成貨物的出入庫、盤點、放置等任務。穿梭車具有運行速度快、智能化程度高等特點,適用于各種物流倉儲系統。
穿梭車移動方式的不同導致了基于穿梭車的自動化密集倉儲系統的技術演變[5]。
1? ? 基于穿梭車的自動化密集倉儲系統的技術演變
1.1? ? 以雙向行駛穿梭車為核心的系統——多層穿梭車倉儲系統
多層穿梭車倉儲系統(MSWS)是一種新型的自動化倉庫,受到越來越多公司的青睞[6]。
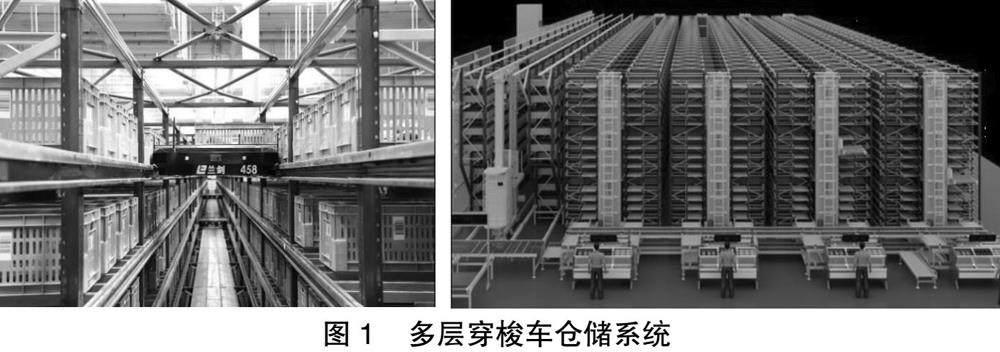
如圖1所示,MSWS包含多條平行排列的巷道,巷道兩邊的貨物為單倍深存儲,提升機通常位于巷道末端。穿梭車只能沿著巷道方向做直線往復運動(前后移動),不可左右移動。
系統中存在單層作業和跨層作業兩種作業模式。單層作業模式中,為每層貨架的每條巷道配備一臺穿梭車。當系統出入庫流量較大、穿梭車閑置率較低時,適合采用單層作業模式。跨層作業模式中,每列垂直排列的多條巷道內至少存在一輛穿梭車,穿梭車可通過提升機實現換層操作,處理不同貨架層的貨物。該模式適用于穿梭車存在閑置的情況,經濟性、擴展性和柔性都更佳。
1.2? ? 以子母穿梭車為核心的系統——子母穿梭車倉儲系統
如圖2所示,子母穿梭車倉儲系統包含多條平行排列的巷道,巷道兩邊的貨物為多倍深存儲,存在翻箱問題/倒庫問題,提升機位于巷道末端。
系統中母車與子車作業模式靈活,母車(shuttle carrier)牽引著子車(radio shuttle)在貨架的主導軌上行駛(前后移動),當到達特定支道時,子車被釋放,自主運行到支道進行作業(左右移動),與此同時,母車可在主導軌上接駁協同其他子車進行作業或對子車進行在線充電。若要進行換層作業,母車可攜帶子車乘坐提升機去往指定樓層。
子母穿梭車四向移動的實現使貨物在各個貨架之間的運輸布局更為緊湊、簡潔,進而使系統的倉儲效率和空間利用率都得到一定程度的提升。但子母穿梭車結構和組成上過于復雜,因此安全性和穩定性不高,出現故障后的維護過程存在困難,且成本較高[7]。
1.3? ? 以四向穿梭車為核心的系統——四向穿梭車倉儲系統
如圖3所示,四向穿梭車是子母穿梭車的升級版,在保留前后(主導軌)左右(支導軌)四向運動的基礎上對車體結構進行了簡化。穿梭車可以通過提升機移動到任何目標樓層,并通過主軌道和巷道兩邊的支導軌到達任意貨位位置,從而完成系統的倉儲和取貨作業[8]。
1.4? ? 以可任意移動2D穿梭車為核心的系統——活立方密集倉儲系統
近年來,新一代密集倉儲系統——活立方密集倉儲系統變得越來越流行[9]。
如圖4所示,活立方密集倉儲系統也可被視為多層的基于拼圖的倉儲系統(Puzzle-based Storage System,PBS系統)。每層倉儲空間均由多個貨位緊密排列組合而成的矩形網絡,每個貨位可以為空或容納單個存放在穿梭車上的貨物。單層倉儲空間中不存在任何通道,只存在少量空貨位(簡稱空位),載有貨物的穿梭車可沿上下左右四個基本方向移動至相鄰空位,以實現存取貨操作。各層倉儲空間通過提升機進行連接。載著貨物的穿梭車可借助提升機,往返于目標樓層與位于地面的工作站。
當收到存取貨命令時:提升機從地面工作站出發,到達目標貨物所在樓層;樓層內穿梭車沿著軸和軸任意自主移動,合力將載著目標貨物的穿梭車送達提升機處,其中,提升機可視為臨時空位參與移動;通過提升機將載有目標貨物的穿梭車運往地面工作站。當收到存貨命令時:載著目標貨物的穿梭車從地面工作站出發,通過提升機到達目標樓層;樓層內穿梭車沿著軸和軸任意自主移動,合力將載著目標貨物的穿梭車送達特定貨位;提升機返回地面工作站。
活立方密集倉儲系統貨物存儲密度高、響應時間短,通常應用于停車系統、倉庫和集裝箱碼頭等實際場景[9]。
1.5? ? 以3D穿梭車為核心的系統——3D穿梭車倉儲系統
以上提到的穿梭車,如果要實現跨層作業,都必須借助提升機進行升降,如果去除這一限制,那么系統將更加靈活與高效。
加拿大的Attabotics創業公司創新性地推出了一款可以依靠貨架上安裝的高精度導軌沿著、、軸方向實現六向移動的3D穿梭車和對應的3D穿梭車倉儲系統(如圖5所示)。該3D穿梭車倉儲系統為由多個貨位緊密排列組合而成的立方體結構,系統中不存在提升機,只存在多條貫穿式通道,通道四周存放著單倍深存儲的貨物,地面工作站位于系統最下層架空層。3D穿梭車可沿著、、軸方向上的高精度導軌,通過系統頂層、底層和多條貫穿式通道自主移動到目標樓層的目標貨位完成倉儲和取貨作業。
自動化密集倉儲系統正向著靈活化發展,若在系統中安裝復雜的固定設備,系統面對未來需求變化而進行擴展的能力會大大降低[10]。同時,作為倉儲系統最重要的性能之一[9],存取貨時間必須盡可能的短,以保證倉儲系統的高效吞吐。為了滿足新時代自動化密集倉儲系統的需求,在保持高倉儲密度的同時,提高系統靈活性與高效性是倉儲管理人員必須考慮的關鍵問題。因此,結合活立方密集倉儲系統的多倍深存儲和3D穿梭車倉儲系統中的六向移動技術,提出以三維自主移動穿梭車為核心的活立方密集倉儲系統,并針對該系統中的存取貨調度問題建立整數規劃模型。為比較倉儲密度相同時,包含提升機的傳統活立方密集倉儲系統與以三維自主移動穿梭車為核心的活立方密集倉儲系統在存取貨方面的性能,在不同系統配置中進行了數值實驗,同時驗證了調度模型的有效性與通用性。
2? ? 問題描述
2.1? ? 基于三維自主移動穿梭車的活立方密集倉儲系統
考慮規模為、I/O點位于系統左下角的以三維自主移動穿梭車為核心的活立方密集倉儲系統(如圖6所示)。該系統是由多個貨位緊密排列組合而成的立方體結構,每個貨位可以為空或容納單個存放在穿梭車上的貨物,系統中不包含提升機及任何通道,只存在少量用于實現存取貨操作的空位。借助三維自主移動穿梭車,貨物可沿軸、軸和軸六個基本方向移動至相鄰空位。貨物可通過位于系統左下角的I/O點(輸入/輸出位置)被存入或取出。
基于三維自主移動穿梭車的活立方密集倉儲系統的狀態是通過空位、穿梭車和目標貨物的位置來定義的,通常用三維狀態矩陣表示。
其中0表示空位,1表示阻塞貨物,2表示目標貨物,4表示穿梭車位于阻塞貨物處,5表示穿梭車位于目標貨物處。
圖7為某活立方密集倉儲系統軸和軸方向某橫切面的系統狀態及對應狀態矩陣舉例。
2.2? ? 基于三維自主移動穿梭車的活立方密集倉儲系統中的存取貨調度問題
活立方密集倉儲系統中的存取貨調度問題主要研究在給定系統狀態下,接收到存取貨指令后,如何在最短的時間內協調多輛穿梭車,使其協作配合,合力將目標貨物運往指定終點。該調度問題的輸出結果通常為最短存取貨時間和相應的目標貨物、阻塞貨物和穿梭車的具體調度方案。
為了提高存取貨速度,加入考慮塊運動[11]和并行運動[12]。一組連續排列在一行或一列中的貨物及穿梭車可以沿空位方向一起移動,該過程稱為塊移動[11],如圖8(a)所示。單位時間內發生多次不存在沖突的貨物及穿梭車移動,該過程稱為并行移動,如圖8(b)所示[12]。
2.3? ? 問題假設
本文做出以下假設。只考慮系統中單貨物的存取貨問題;系統中存在隨機分布的多個空位;I/O點位于系統左下角;系統中的穿梭車是同質的,不考慮穿梭車加速、減速、轉彎、轉向等操作;穿梭車和承載的貨物在單位時間內可沿軸、軸和軸的六個基本方向移動一個貨位尺度或保持靜止,在不發生沖突的情況下允許塊移動與并行移動。
3? ? 三維網絡流模型
將系統中各個貨位和單位時間的組合記為節點。如果穿梭車、目標貨物或阻塞貨物在單位時間內從一個貨位移動到相鄰的貨位,則產生運動弧;如果穿梭車、目標貨物或阻塞貨物在單位時間內停留在某一貨位中不發生移動,則產生空轉弧。這些弧和節點共同形成帶有約束的時間擴展圖(TEG),通過控制TEG中弧的流入與流出,可以實現在現實中對穿梭車,目標貨物或阻塞貨物的調度[13]。
使用表1中的符號,將形成的帶有約束的時間擴展圖(TEG)轉為整數線性規劃問題(ILP),并建立相應的三維網絡流模型。
該三維網絡流模型可用于求解以三維自主移動穿梭車為核心的活立方密集倉儲系統中存取貨問題的最優解。目標函數為存取貨時間最短。約束(1)—約束(3)是流量守恒約束,即對TEG中任意節點來說,流入弧的數量和流出弧的數量要相同。約束(4)—約束(9)是系統初始狀態約束,保證所有弧都從初始位置流出,非初始位置沒有弧流出。約束(10)保證所有貨物均依托于穿梭車發生移動。約束(11)—約束(12)表示,在單位時間內,以j為終點的弧之間不存在沖突。約束(13)保證目標貨物在取貨時間上限內,到達I/O點。約束(14)—約束(17)消除穿梭車之間的沖突與碰撞。
4? ? 數值實驗與結果分析
4.1? ? 實驗設計
為比較倉儲密度相同時,傳統活立方密集倉儲系統和以三維自主移動穿梭車為核心的活立方密集倉儲系統在存取貨方面的性能,同時驗證三維網絡流模型的有效性與通用性,在配置為AMD Ryzen7 5 800H 1.90 GHz CPU,RAM 16 GB的Windows 10計算機上,利用PYTHON搭建仿真平臺,并采用GUROBI對模型進行求解。
由于存取貨互為逆過程,選擇其一展開研究即可。考慮一個真實的活立方停車系統中的取貨問題,基本系統參數如表2所示[9]。
表2? ? 基本系統參數
系統參數 貨位長度 貨位長寬度 貨位高度 穿梭車速度 升降機速度
值 4m 4m 4m 1.3m/s 1.3m/s
綜合考慮倉儲密度、建設成本和存取貨效率,傳統活立方密集倉儲系統中單層倉儲空間的空位率通常設置為11.11%左右(包括升降機所占空間)[14]。由于以三維自主移動穿梭車為核心的活立方密集倉儲系統中不存在提升機,原提升機所占空間直接折換成任意分布的活動空位參與取貨過程。實驗參數如表3所示。
(18)
規模分別為、、和的傳統活立方密集倉儲系統和以三維自主移動穿梭車為核心的活立方密集倉儲系統各隨機生成500個算例,比較兩個系統在平均取貨時間上的差異。
4.2? ? 結果分析
為了更直觀地反映以三維自主移動穿梭車為核心的活立方密集倉儲系統相對于傳統活立方密集倉儲系統對取貨時間的優化程度,定義 (retrival time steps)表示當前系統下所有算例的平均取貨時間,表示以三維自主移動穿梭車為核心的活立方密集倉儲系統中單個算例相對于傳統活立方密集倉儲系統中單個算例在取貨時間上的節省比例, (average saving percentage in time)表示以三維自主移動穿梭車為核心的活立方密集倉儲系統中所有算例相對于傳統活立方密集倉儲系統中所有算例在取貨時間上的平均節省比例,計算公式如下。
其中,表示以三維自主移動穿梭車為核心的活立方密集倉儲系統中單個算例的取貨時間,表示傳統活立方密集倉儲系統中單個算例的取貨時間,表示使用的算例數。
數值實驗結果(表4)表明,當倉儲密度不變時,與借助提升機完成存取貨操作的傳統活立方密集倉儲系統相比,以三維自主移動穿梭車為核心的活立方密集倉儲系統的存取貨效率得到了進一步提高。同時,證明三維網絡流模型在各種系統配置下的有效性與通用性良好。
5? ? 結論與展望
結合活立方密集倉儲系統的多倍深存儲和3D穿梭車倉儲系統中的六向移動技術,提出了以三維自主移動穿梭車為核心的活立方密集倉儲系統,并針對該系統中的存取貨調度問題建立整數規劃模型——三維網絡流模型。大量算例表明,當倉儲密度不變時,與借助提升機完成存取貨操作的傳統活立方密集倉儲系統相比,以三維自主移動穿梭車為核心的活立方密集倉儲系統在存取貨時間上的平均節省比例約為30%,存取貨效率有著較為明顯的提高。同時,提出的三維網絡流模型具有良好的求解性能和通用性能。綜上,應用以三維自主移動穿梭車為核心的活立方密集倉儲系統,并通過三維網絡流模型對其存取貨過程進行調度,可以在保持高倉儲密度的同時提高系統靈活性與高效性,以滿足相關企業對于新時代倉儲系統的要求。
在后續的研究中,可以進一步考慮三維自主移動穿梭車的轉向、加速和減速等操作對取貨過程的影響。在優化目標上考慮取貨過程的能量消耗、二氧化碳排放量等也是值得研究的方向之一。
參考文獻:
[1] ZAERPOUR N,YU Yugang,DE KOSTER R.Small is beautiful: A framework for evaluating and optimizing live-cube compact?storage systems[J].Transportation Science,2015,51(1):34-51.
[2] AZADEH K,DE KOSTER R,ROY D.Robotized and automated warehouse systems: Review and recent developments[J].? ? Transportation Science,2019,53(4):917-945.
[3] 陸大明.中國物流倉儲裝備產業發展研究報告[M].北京:機械工業出版社,2018.
[4] 王康康.密集倉儲系統中往復式穿梭車設計[D].北京:北京物資學院,2014.
[5] 陳滌新.論多層穿梭車系統的技術發展[J].制造業自動化,2018,40(9):168-172.
[6] WANG Yanyan,LIU Ziwei,HUANG Ke,et al.Model and solution approaches for retrieval operations in a multi-tier shuttle? ?warehouse system[J/OL].Computers & Industrial Engineering,2020,141:106283.[2023-06-07].https://doi.org/10.1016/j.cie.2020.106283.
[7] 歐亞德集團官網.“雙向、子母車、四向”貨架車的區別[EB/OL].(2021-04-23)[2023-07-13].https://www.ouyade88.com/article_? ?detail.asp?id=813#.
[8] 秦彩云,吳穎穎,吳耀華,等.兩種多層穿梭車系統的性能比較分析[J].機械工程學報,2020,56(20):255-264.
[9] ZAERPOUR N,YU Yugang,DE KOSTER R B M.Response time analysis of a live-cube compact storage system with two storage?? classes[J].IISE Transactions,2017,49(5):461-480.
[10] CUSTODIO L,MACHADO R.Flexible automated warehouse: A literature review and an innovative framework[J].The International? ? ?Journal of Advanced Manufacturing Technology,2020(106):533-558.
[11] YU Hu,YU Yugang,DE KOSTER R.Dense and fast: Achieving shortest unimpeded retrieval with a minimum number of empty cells?? ? in Puzzle-Based Storage systems[J].IISE Transactions,2022,55(2):156-171.
[12] GUE K R,FURMANS K,SEIBOLD Z,et al.GridStore: A puzzle-based storage system with decentralized control[J].IEEE??Transactions on Automation Science and Engineering,2014,11(2):429-438.
[13] RAVIV T,BUKCHIN Y,DE KOSTER R.Optimal retrieval in puzzle-based storage systems using automated mobile robots[J].? Transportation Science,2023,57(2):424-443.
[14] GUE K R,KIM B-S.Puzzle‐based storage systems[J].Naval Research Logistics (NRL),2007,54(5):556-567.