一種基于伺服系統實現四電機消隙的控制方法
2024-07-09 22:54:36唐智鵬
大眾科學 2024年6期
唐智鵬
摘 要: 針對齒輪傳動系統驅動超大負載轉臺高精度、快速響應的消隙伺服控制領域,雙電機消隙伺服系統存在單伺服系統體積大、功率大、成本高、消隙單一的缺點,為此,設計了基于四伺服同步控制四電機消隙系統;實現了多伺服同步控制的四電機消隙,有效地降低單臺消隙伺服系統的功率、體積、成本,并且安裝也相對靈活;又能較好地實現百噸級超大負載高精度快響應控制。
關鍵詞: 高精度 伺服系統 消隙 四電機消隙 超大負載
中圖分類號: TP273文獻標識碼: A文章編號: 1679-3567(2024)06-0025-04
Realization of Four-Motor Anti-Backlash Based on Four-Servo Synchronous Control
TANG Zhipeng
Guilin Stars Science and Technology Co., Ltd., Guilin, Guangxi Zhuang Autonomous Region, 541004 China
Abstract: In the field of anti-backlash servo control with high precision and fast response of the super-large load turntable driven by the gear transmission system, the double-motor anti-backlash servo system has the shortcomings of the large volume, high power, high cost and single anti-backlash of the single servo system, so a four-motor anti-backlash system based on four-servo synchronous control is designed. It realizes the four-motor anti-backlash based on multi-servo synchronous control, and effectively reduces the power, volume and cost of a single antibacklash servo system, which is also relatively flexible to install, and it can also better achieve the high-precision and fast-response control of hundred-ton super-large load.
Key Words: High precision; Servo system; Anti-backlash;Four-motor anti-backlash;Oversized load
隨著航空航天、汽車、高速鐵路等行業的高速發展,轉臺控制的精度越來越高,所以對高精度、高響應、高速度的轉臺控制技術需要更加迫切,轉臺系統的驅動方式主要為高速伺服電機+齒輪傳動,齒輪傳動是利用兩齒輪輪齒相互嚙合來傳遞動力和運動的機械傳動,齒輪傳動是應用十分廣泛的一種機械傳動。
這種間接傳動方式在完成各種運動時存在諸多問題,產生的摩擦,變形、反向間隙等會引起系統響應速度慢、動態剛度差,及其他非線性誤差,難以滿足現代日益增長的高精度要求。為了解決這些問題,齒輪消隙技術孕育而生,特別是伺服消隙技術的發展,很好地解決了齒輪間隙問題。伴隨著多單元伺服同步控制技術的日益成熟,四消隙驅動超大負載轉臺進行高精度、高響應、高速度成為現實。
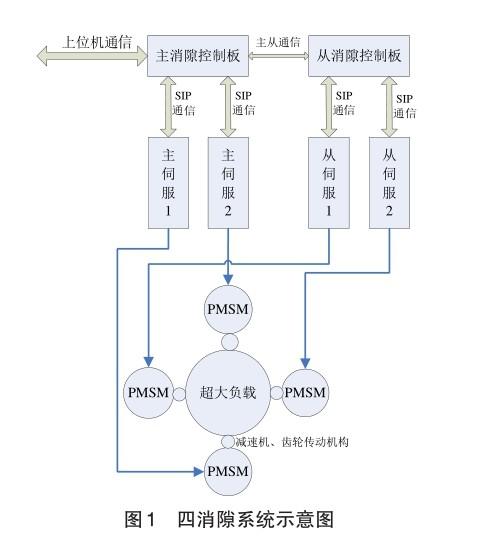
四消隙伺服控制可以使用主從雙電機消隙伺服系統及主從消隙控制實現四消隙算法控制。主消隙控制板使用主從通信控制從消隙控制板,主從消隙控制板分別通過SPI通信控制兩臺伺服驅動兩臺伺服電機,電機帶動減速機、齒輪傳動機構來驅動超大負載轉臺,來實現四消隙控制見圖1。
1 消隙的工作原理
1.1 齒輪傳動機構消隙原理
四消隙驅動系統中存在的間隙主要出現在傳動機構的齒輪等機械部件中。要消除齒輪之間的間隙,就需要電機端的小齒輪作用在負載端的大齒輪力,出現兩種力大小一致且方向相反的靠齒力;如圖2主機消隙驅動系統齒輪消隙如圖2所示[1-2],主機消隙兩驅動電機在空間上為對稱布置。
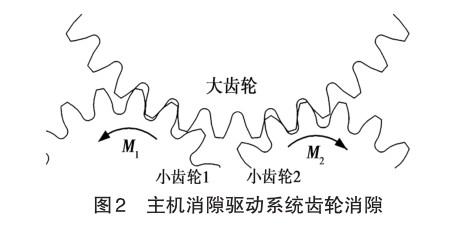
主機消隙驅動系統由主消隙控制板實現主電機消隙算法,使小齒輪1對大齒輪產生一個順時針的靠前齒力,使小齒輪2對大齒輪產生一個逆時針的靠后齒力,進而消隙了小齒輪1、小齒輪2與大齒輪之間的間隙,從機消隙驅動系統齒輪消隙也亦然。
1.2 伺服消隙過程
當主機消隙驅動系統處于閉環消隙工作狀態時,主機兩主電機是按圖3所示的電流控制曲線,通過各自的減速器去驅動轉臺齒輪(該齒輪與轉臺應為無隙連結結構),從圖中可看到,永遠不會出現兩個主機電機輸出轉矩同時為零的情況,也就是說,任何時候兩個電機至少有一個會對轉臺齒輪施加不為零的轉矩,在此轉矩的作用下,轉臺的運動間隙就不可能存在。當然,此轉矩必須大于傳動鏈本身的摩擦力矩[2,3,4]。
主機伺服驅動的電流環輸入電壓與電機輸出轉矩之間呈線性關系,主機伺服驅動系統的速度閉環的輸出經消隙算法處理后,將消隙控制曲線值分別傳輸給兩主伺服,如圖4所示的電流消隙曲線,就可以達到消除齒隙的目的。
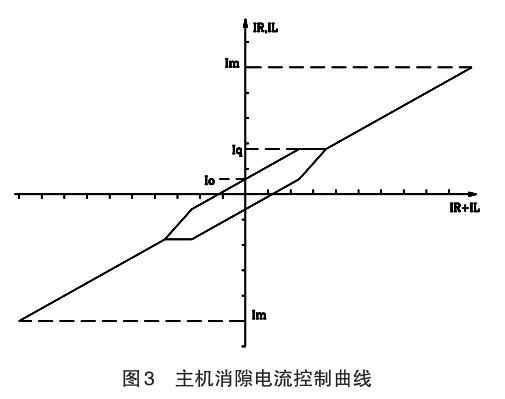
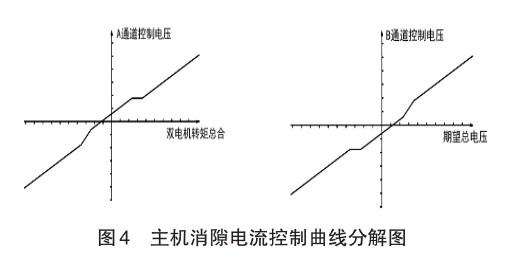
在消隙工作模式下,若主機消隙系統需要的輸出合力矩為零時,兩主電機的電樞電流為±Io(消隙偏置電流),其輸出力矩大小相等方向相反;若主機消隙系統需要的輸出合力矩增加時,兩主電機的電樞電流隨圖4的消隙電流曲線變化,其中一個通道的輸出力矩將逐漸減小至零,從阻力源變為動力源;若主消隙系統需要的輸出合力矩繼續增加,兩主電機的電樞電流大于Iq(拐點電流值)后,兩主電機將以相同出力對外作功。
主從消隙驅動系統組成了四消隙,主消隙控制板速度閉環后,將速度閉環值通過主從通信傳輸至從機消隙控制板,主機與從機同步進行消隙算法處理,分別驅動主從消隙驅動系統實現對超大負載轉臺四電機消隙同步控制。
2 四消隙的實現
2.1 伺服方案
伺服選用4臺63 kW交流伺服驅動器及2塊消隙控制板。伺服驅動器的主控芯片為DSP,主要功能為SVPWM控制、保護功能、電流閉環及SPI通信,電流環控制周期≤83.33 uS,最大電流150 A;消隙控制板的主控芯片為ARM,主要功能為I/O口控制、速度閉環、消隙算法、CAN通訊控制及SPI通信,速度環控制周期≤333.33 uS,速度環調速比3 000 rpm∶0.3 rpm。
2.2 軟件方案
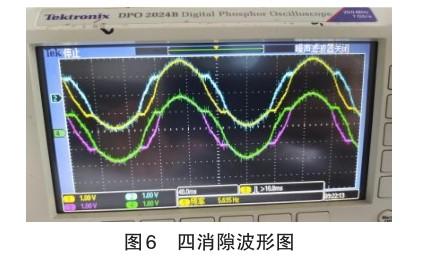
2.3 四電機消隙波形
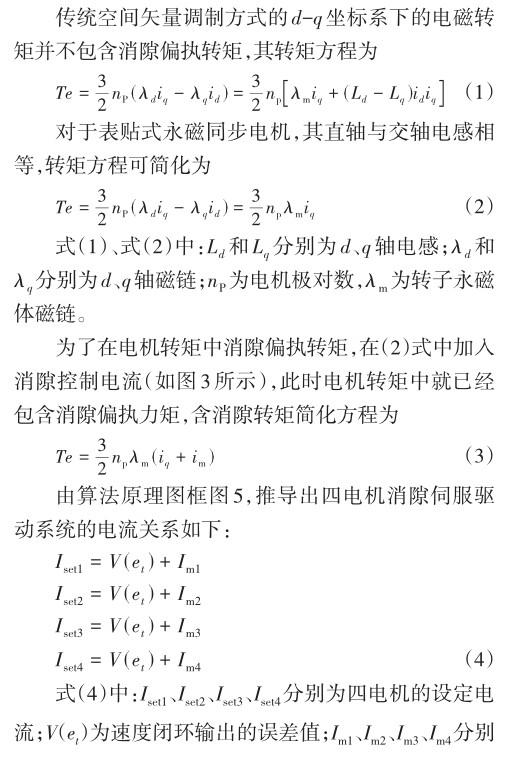
采用圖1所示構建四電機消隙控制系統,消隙控制器實現算法波形圖如圖3所示,四電機消隙控制系統軟件算法如圖5所示[1,5,6],四電機消隙波形圖如6所示。從圖6看四電機消隙波形一致,同步性優良,不僅可以實現消隙功能,還能實現四電機同步控制。
3 四消隙的特點
消隙伺服系統在消除傳動機構的齒隙帶來的非線性,具有結構簡單、消隙效果好及成本低的優勢。隨著四消隙伺服系統的特點如下:
(1)消除傳動機構的齒隙;
(2)高精度,響應速度快,帶寬高;
(3)調速比高、穩定性好;
(4)極大提高了超大轉臺負載能力;
(5)既能實現多伺服同步控制,又能實現消隙技術;
(6)能通過主從通訊擴展同步控制更多伺服驅動器。
鑒于以上的特點,可應用于高精度、超大負載的齒輪傳動伺服系統控制場合,如應用于高精度超大負載消隙傳動機構及大中型數控系統、機器人控制、工業控制、轉臺控制、武器火力控制、雷達控制及慣性導航領域中。
4 結語
四伺服同步控制四電機消隙系統,實現四電機雙消隙曲線,不僅消除了超大負載齒輪傳動機構的齒隙,還通過調速比及減速機的傳遞比,使驅動上百噸及幾百噸的負載跟隨控制系統,進行高精度的隨動控制成為現實。目前四伺服同步控制四電機消隙系統產品已在轉臺控制、工業控制領域得到了應用,未來隨著技術的發展可實現更多數量伺服同步控制的消隙系統。
參考文獻
[1]江勇,張偉,劉曉源,等.雙電機消隙技術在串聯機械臂中的仿真與應用[J].中國機械工程,2020,31(16): 1991-1997.
[2]鄭杰基,陳凌宇,范大鵬,等.雙電機精密傳動機構消隙方法研究[J].中國機械工程,2022,33(22):2684-2692.
[3]李方俊,王生捷,李浩.基于擾動補償的雙電機同步消隙策略研究[J].電機與控制應用,2021,48(3):27-35.
[4]李莉.雙電機驅動伺服系統消隙及同步控制方法研究[D].天津:天津工業大學,2017.
[5]楊國文,靳磊,趙沖,等.高速搜索雷達伺服系統設計[J].科技創新與應用,2020(11):106-109.
[6]陳立奇.基于單片機的嵌入式多電機智能控制系統設計[J].計算機測量與控制,2020,28(5):117-122.