毫米波雷達點云聚類自適應的實時目標定位算法
2024-08-09 00:00:00李政儀田尊華
電子產品世界 2024年6期
關鍵詞:點云聚類數據集;毫米波雷達;實時目標定位;粒子濾波;多元素特征分析
中圖分類號:TN958.98 文獻標識碼:A
0 引言
傳統攝像頭傳感器系統在進行實時目標定位[1]處理時,受制于天氣、光照以及續航時間等因素,難以實現全天時、全天候的目標狀態定位。而當前較為熱門的3D 激光雷達傳感系統雖然具備高精度的優勢,但其同樣難以較好地適應惡劣天氣,造價也較為高昂。基于此,毫米波雷達傳感系統憑借快速處理小批量數據的優勢以及較強的實時性定位特點,具有較高的應用價值。
1 算法介紹
1.1 毫米波雷達點云聚類自適應的實時目標定位算法實現流程
本文設計的毫米波雷點云自適應的實時目標定位算法(簡稱“本文算法”)主要包含數據處理與聚類、目標定位兩個部分。先對目標對象點云數據進行聚類,基于多元素特征提取與分析、概率模型算法確定目標對象狀態,從而實現目標對象的實時定位、跟蹤與控制。本文算法可以高效、實時地完成目標對象的定位任務。
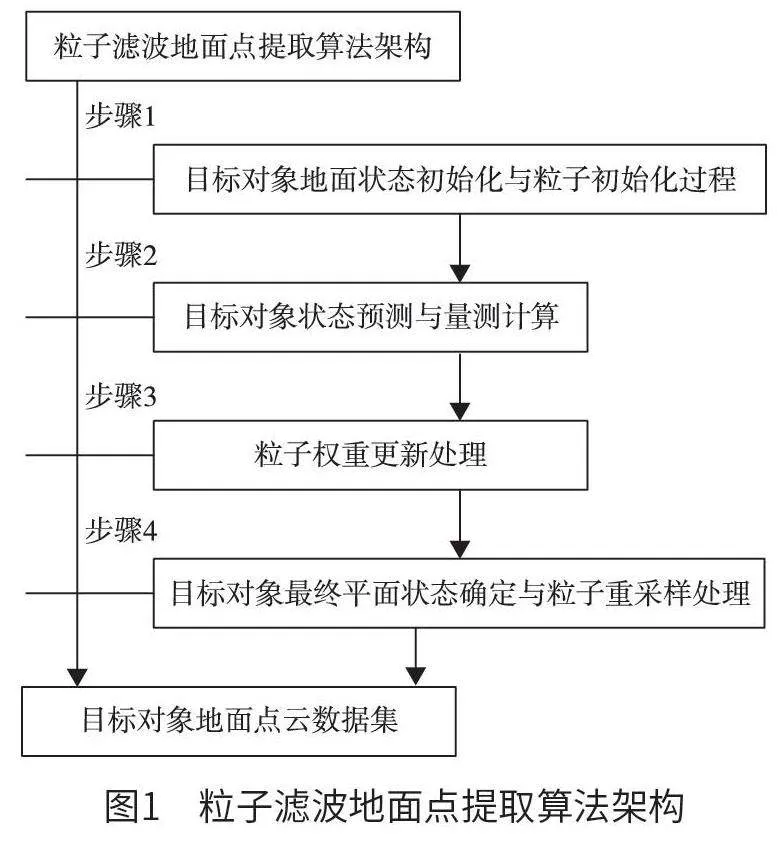
為了實現目標對象地面點的有效提取,避免對干擾點進行無效處理,引入了粒子濾波理論對地面點進行跟蹤處理。粒子濾波地面點提取算法架構如圖1 所示,具體流程如下。
步驟1:目標對象地面狀態初始化與粒子初始化過程。首先對地面點集合進行篩選,將目標對象地面點到地面平面垂直投影的長度設定為特征最低點的高度值,采集所有的特征最低點高度值并對其進行平均值處理,并將該平均值設定為最終的目標對象地面特征最低點。以最終目標對象地面特征最低點的高度值作為篩選閾值,將最終篩選出的所有點作為目標對象地面狀態初始化數據集。
步驟2:目標對象狀態預測與量測計算。通過目標對象上一狀態的概率密度,基于馬爾科夫過程假設理論對粒子疊加噪聲,實現下一時刻狀態預測并且得到下一時刻的概率密度數值。量測計算主要是對高度非線性函數進行求解,形成目標對象點云數據集,將數據集中的點到預選平面的垂直投影長度與場景設置中的距離閾值進行比較[3],從而確定點云數據集合中的具體數據點。從已經確定的點云數據集中采樣M 個數據點,計算其到平面向量的距離,求此類距離的平均值,對應的計算公式如下:
步驟4:目標對象最終平面狀態確定與粒子重采樣處理。基于粒子及其權重對目標對象最終平面狀態進行計算。為了解決粒子濾波在反復迭代計算過程中出現的粒子退化問題,本文采用重采樣算法進行處理,通過計算點云數據集中各個點到目標對象最終平面狀態所對應平面的距離,設置合理的閾值篩選地面點與干擾點,選取地面點作為本文聚類處理的數據集。
1.3 基于多元素特征分析與概率模型分析的目標對象狀態監測
1.3.1 基于多元素特征分析的目標對象狀態監測
引入的基于多元素特征分析的目標對象狀態監測算法核心思路如下:以具體目標對象的中心點位置為圓心,將其點云量測按照固定的角度進行旋轉,在此過程中依據實際測量范圍進行框選操作,并選擇目標對象最佳框選狀態,此時便可以確認目標對象的方位角以及點云量測的具體范圍。
其次,需要確定目標對象的方位角。以目標對象的中心點構建局部坐標系,同時以目標對象中心點為中心進行旋轉,旋轉角度采取固定度數步進的方法進行計算,旋轉過程中統計框選的點云數據量,當點云數據量達到最大時,此時方位角便為目標對象的最終方位角。
1.3.2 基于概率模型分析的目標對象狀態優化處理
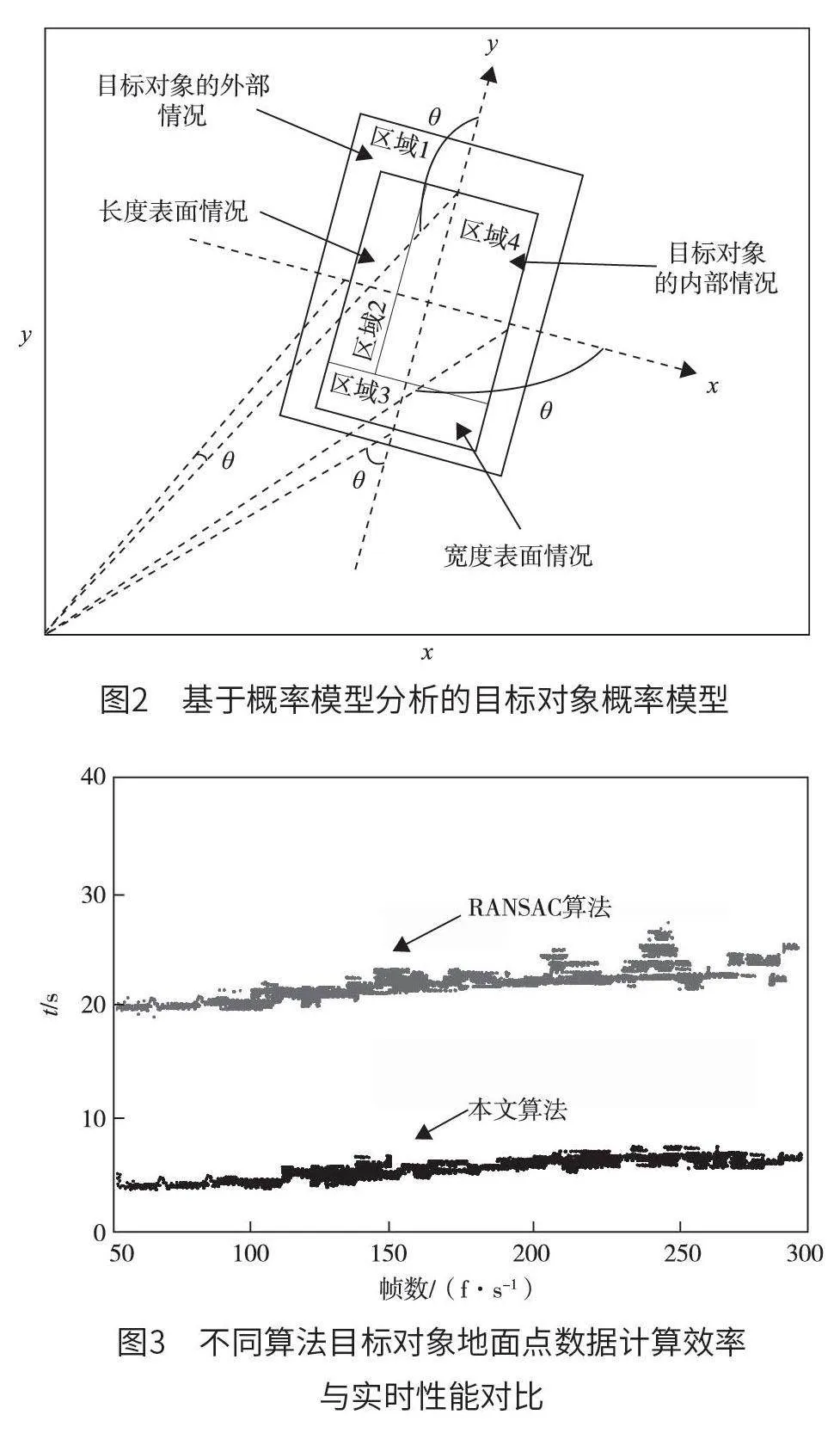
為了更為精確地實時測量目標對象的狀態,完成高質量定位、跟蹤與控制,引入概率模型分析算法對目標對象狀態進行優化。以多元素特征分析算法所得到的目標對象初始中心位置以及方位角作為輸入,設定毫米波雷達坐標系與地面平面重合,同時將三維點云量測投影到xy 平面,將點云量測點用二維正態分布進行建模,基于概率模型分析的目標對象概率模型如圖2 所示,根據相關數據掉落點確認目標對象的狀態。
2 實驗結果與分析
2.1 實驗說明
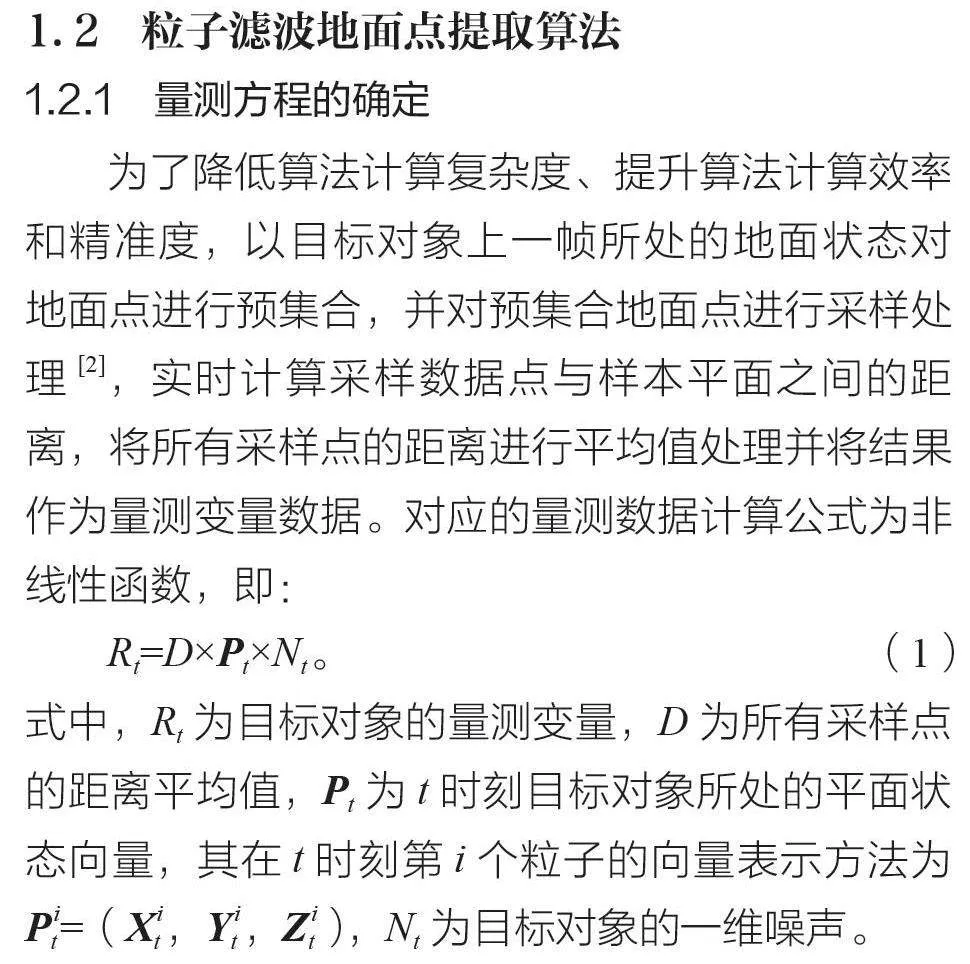
為了驗證本文算法在提取目標對象地面點數據時的計算效率與實時性能,將本文算法與隨機樣本一致(random sample consensus,RANSAC) 算法進行比較[4]。本實驗分別采集相同目標對象的點云數據,并在工控機上分別運行點云聚類自適應的實時目標定位算法與RANSAC 算法,記錄300 幀數據下每個算法處理數據的耗時。如圖3 所示,相較于RANSAC 算法,本文算法在處理數據時的耗時明顯較低,對應的實時性表現也較好。
2.2 算法實時性驗證與對比
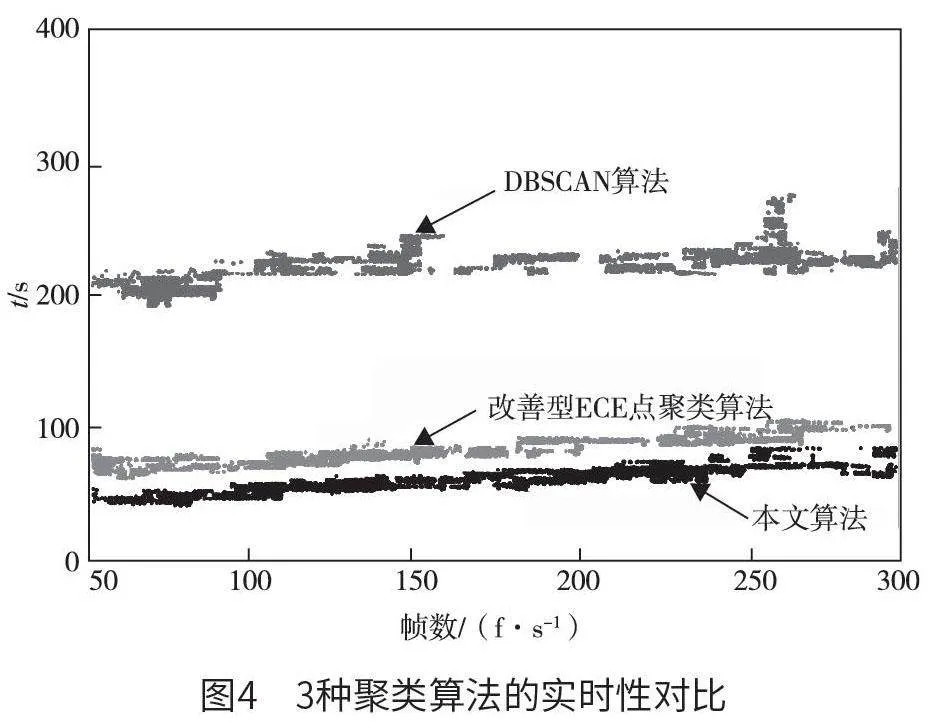
為了驗證本文算法的實時性,在相同實驗條件下,將本文算法與具有噪聲的基于密度的聚類(densitybasedspatial clustering of applications with noise,DBSCAN)算法、改善型期望交叉熵(expected crossentropy,ECE)點聚類算法及圖像與激光點云融合的實時目標定位算法進行比較。本實驗分別采集相同目標對象的點云數據,并在工控機上分別運行點云聚類自適應的實時目標定位算法、DBSCAN 算法以及改善型ECE 點聚類算法,記錄300 幀數據下每個算法處理數據的耗時。如圖4 所示,相較于改善型ECE 點聚類算法,本文算法在處理每一幀數據所需要的時間上具有較小的優勢,但是相較于傳統DBSCAN 算法,其處理速度快了約4 倍。將本文算法和圖像與激光點云融合的實時目標定位算法[5] 進行對比,圖像與激光點云融合的實時目標定位算法在嵌入式平臺上每幀處理耗時約為612.3 ms,進而計算得到300 幀對應的耗時為183.69 s,因此本文算法的實時性更高,具有明顯優勢。
3 結論
針對當前毫米波雷達定位實時性較差、算法實現效率較低以及準確性較低的問題,本文創新性地提出了毫米波雷達點云聚類自適應的實時目標定位算法。實驗結果表明,本文算法在車輛目標定位實時性和準確性指標上具有明顯的優勢。