基于用戶聚類的無人機集群任務規劃策略
2024-09-06 00:00:00馬丁飛趙芝因王瑞王詩怡
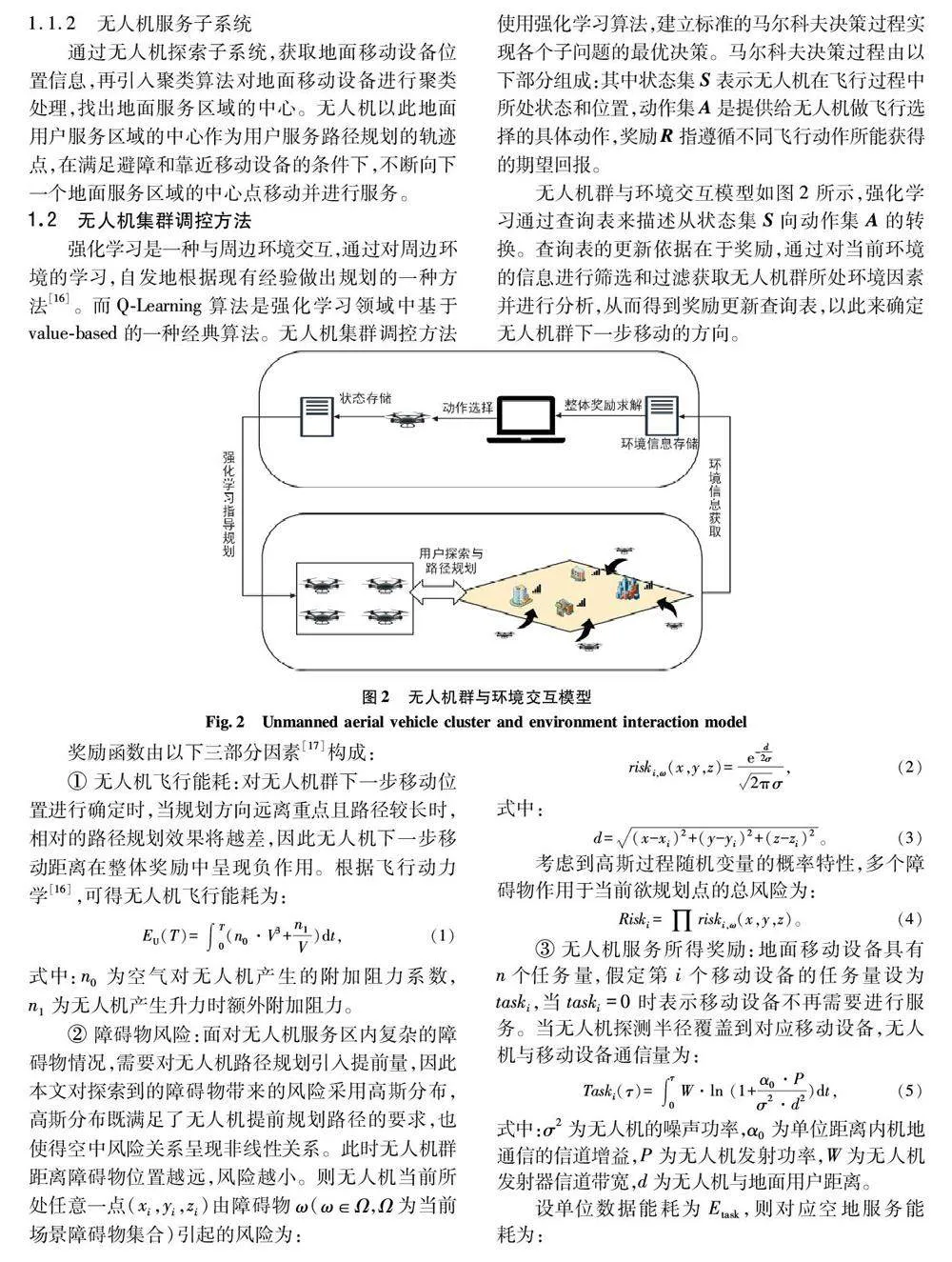
無線電通信技術 2024年3期

摘 要:為解決自然災害引發的“斷電、斷網、斷路”所導致的通信指揮難題,提出了一種無人機輔助網絡系統,通過機載邊緣服務器裝載地面用戶熱門訪問內容并發布應急通知消息。無人機基于地面服務需求,引入了Q-Learning強化學習算法進行軌跡規劃并將整個系統分為無人機探索子系統和無人機服務子系統。無人機探索子系統針對單個無人機信號覆蓋面積有限無法采集到區域內所有移動設備位置的問題,創建邊界探索方式來確定無人機群的最優數量。無人機服務子系統通過分別對移動設備進行Kmeans、K-medoids、AGNES 聚類選取最優聚類方式確定聚類中心,以聚類中心為導向進行軌跡規劃從而盡最大可能為移動設備服務。仿真結果表明,所提無人機輔助系統具有設計可行性,確定了無人機群信號全覆蓋的最小配置數量,同時得出不同聚類算法的無人機群適用場景。研究結果可用于評估地面用戶的保障服務體驗,為無人機輔助通信網絡的架構設計與控制優化提供依據。
關鍵詞:無人機;強化學習;K-means;Kmedoids;AGNES
中圖分類號:TN919. 23 文獻標志碼:A 開放科學(資源服務)標識碼(OSID):
文章編號:1003-3114(2024)03-0528-07
0 引言
在颶風“卡特里娜”、南亞大地震、澳大利亞洪災等超大型自然災害發生后,世界人民已經將目光轉移到如何進行有效的防險救災[1]。大型自然災害的發生導致關鍵基礎設施被大規模破壞,使得高度依賴基礎設施訪問核心網的網絡體系嚴重受損,對于災難發生后的區域人員及時搜救與網絡訪問極為不利。面對關鍵基礎設施的破壞,目前所采用的解決策略是派遣工作人員人工修理基站和使用生命探測儀來尋找受災人員。伴隨著無人機的發展,其易部署、靈活性強的特點逐漸顯現,通過使用無人機進行網絡系統搭建,可以避免維護基站時人員部署、搜救定位困難等問題[2]。
針對復雜的災后環境,單個無人機無法滿足多個用戶數據傳輸與信號覆蓋要求,因此需要多架無人機協同進行用戶信息采集與服務[3]。在以往研究中,對于無人機的路徑規劃往往集中于深度學習、卷積神經網絡的圖像處理方式,邊緣卸載方式以及數理邏輯處理方式。對于第一種方式,文獻[4]提出一種基于無人機控制器的深度強化學習(DeepReinforcement Learning,DRL)方法,通過存儲深度學習后的雙目視覺信息來進行無人機通信調度。文獻[5]采用基于DRL 的覆蓋和連通性節能控制(DRLbased Energyefficient Control for Coverage andConnectivity,DRLEC3)方式來進行數據處理,通過兩個神經卷積網絡的指導進行精確移動。文獻[4-5]都是通過深度學習方式,針對采集到的信息進行處理,對于采集一定時間的靜態數據處理較為優秀。對于第二種方式,文獻[6]提出了一種互聯網連接無人機的計算卸載系統架構,將無人機需要的計算力分布于網絡,盡管時延有所增長,但大幅度地提高了無人機的處理能力。文獻[7]提出了一種無人機輔助的二級多接入邊緣計算(Multiaccess EdgeComputing,MEC)系統,使得移動設備的低時延數據在無人機與基站上協同進行。文獻[8]提出了一種無人機輔助邊緣計算中基于Agent 的任務卸載框架,以幫助用戶、無人機和邊緣云執行計算任務的卸載。文獻[6-8]將無人機需要轉發和處理的數據通過邊緣設備進行多級分化,從而達到降低能耗的作用。對于第三種方式,文獻[9]考慮無人機飛行能耗和吞吐量限制,采用變量離散化方法將問題轉化為離散等價問題。然后將該問題轉化為凸優化問題。通過解決該凸優化問題,可以獲得收集和處理數據的最佳軌跡。文獻[10]針對應急場景無人機群與用戶的通信持續性問題,通過采用基于地理節點的無人機路由規劃算法跟蹤用戶移動并分配合適路由,進而到達高連接穩定性。文獻[11]針對災后無人機服務時飛行能耗與接入用戶數量聯合優化問題,采用離散時間平均場博弈(Mean Field Game,MFG)框架,不斷調整飛行速度,從而達到無人機自適應覆蓋用戶服務區域。文獻[9-11]依據無人機吞吐量、飛行能耗等參量建立優化問題,并采用凸優化、地理跟蹤等方式對問題進行建模求解。
無人機在執行空地協同應急服務時,由于無法事先獲知地面用戶的服務需求,造成空地協同服務效率不高的問題,為此,部分文獻考慮采用無人機群進行空地協同服務的研究方案。文獻[12]提出了Kmeans[13]與模擬退火算法相結合的策略,以獲得復雜場景下多無人機多任務的路徑規劃方法。為了解決無人機由于續航問題導致的故障,文獻[14]為無人機群設計了分布式服務算法,讓無人機群與地面服務需求之間達成平衡。文獻[15]綜合考慮了地面用戶的位置以及移動性,通過對地面用戶位置進行實時聚類處理,從而優化了無人機網絡對地服務過程中的能量消耗。
基于上述分析,針對無人機最大范圍覆蓋用戶的要求,本文將無人機應急輔助網絡系統分為無人機探索子系統和無人機服務子系統兩部分,前者用于生成避障策略,收集地面用戶的位置分布與服務需求,后者利用地面用戶聚類中心,引導自身的飛行服務的路徑規劃,從而在滿足地面用戶服務的前提下,實現無人機群的優化部署和飛行能效性能提升。
1 系統模型與主要方法
1. 1 系統模型
1. 1. 1 無人機探索子系統
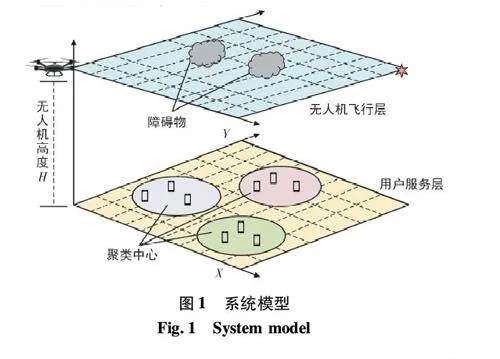
無人機群應急輔助網絡系統模型如圖1 所示,從邏輯層面分為用戶服務層和無人機飛行層,其中無人機飛行層與用戶服務層之間相距H,即無人機群在高度為H 的空間域進行避障飛行,且執行面向地面用戶的服務任務。
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
今日農業(2019年12期)2019-08-15 00:56:32
今日農業(2019年10期)2019-01-04 04:28:15
今日農業(2019年16期)2019-01-03 11:39:20
商周刊(2017年9期)2017-08-22 02:57:56
商用汽車(2016年11期)2016-12-19 01:20:16
商用汽車(2016年6期)2016-06-29 09:18:54
