巷道三維激光點(diǎn)云數(shù)據(jù)變形提取方法
2024-09-28 00:00:00趙冰馬寶賀斌許少毅
哈爾濱理工大學(xué)學(xué)報(bào) 2024年3期
摘 要:在地下煤炭資源開采過程中,高地壓、高應(yīng)力等外部因素會(huì)使得巷道圍巖出現(xiàn)形狀改變并引發(fā)冒頂、片幫等圍巖破壞現(xiàn)象,嚴(yán)重威脅煤礦安全生產(chǎn)。為及時(shí)掌握巷道圍巖變形情況,對(duì)煤礦巷道變形進(jìn)行有效監(jiān)測(cè),提出了一種基于三維激光點(diǎn)云技術(shù)的巷道斷面提取與變形量分析方法,并通過巷道內(nèi)模擬實(shí)驗(yàn)驗(yàn)證了該方法的可行性。實(shí)驗(yàn)結(jié)果表明:所提方法能夠適應(yīng)井下巷道復(fù)雜環(huán)境,自動(dòng)識(shí)別巷道變形位置并利用斷面提取法進(jìn)行更精確的變形分析,所監(jiān)測(cè)表面位移分辨率能夠達(dá)到厘米級(jí),符合巷道表面位移監(jiān)測(cè)需求。
關(guān)鍵詞:煤礦巷道;激光點(diǎn)云;斷面提取;表面位移監(jiān)測(cè)
DOI:10.15938/j.jhust.2024.03.013
中圖分類號(hào): TD76;TN247
文獻(xiàn)標(biāo)志碼: A
文章編號(hào): 1007-2683(2024)03-0107-09
Deformation Extraction Method for Roadway 3D Laser Point Cloud Data
ZHAO Bing1, MA Bao1, HE Bin1, XU Shaoyi2
(1.Shendong Coal Branch, China Shenhua Energy Co., Ltd., Yulin 719000, China;
2.School of Mechanical and Electrical Engineering, China University of Mining and Technology, Xuzhou 221000, China)
Abstract:In the process of underground coal resource extraction, the external factors such as high ground pressure and high stress make the surrounding rock shape change and lead to the collapse of the surrounding rock and other phenomena. It will seriously threaten the safety of coal mine production. In order to timely grasp the deformation of surrounding rock in roadway and effectively monitor the deformation of coal mine roadway, we propose a method for extracting tunnel sections and analyzing deformation based on 3D laser point cloud technology. The feasibility of this method is verified through simulation experiments in roadway. And the experimental results show that the proposed method can adapt to the complex environment of the roadway, automatically identify the deformation location of the roadway, and use the section extraction method for more accurate deformation analysis. The monitoring surface displacement resolution can reach centimeter level to meet the needs of roadway surface displacement monitoring.
Keywords:coal mine roadway; 3D laser point cloud; section extraction; deformation monitoring
0 引 言
煤炭是我國(guó)的主體能源,發(fā)揮著推動(dòng)經(jīng)濟(jì)社會(huì)發(fā)展,保障能源安全的“壓艙石”、“穩(wěn)定器”作用[1]。由于我國(guó)境內(nèi)地表淺部煤炭資源已逐漸開采完畢,部分煤礦進(jìn)入了深度開采階段[2]。在深度開采時(shí),隨著巖層壓力的不斷增大,巷道圍巖變形會(huì)逐漸加劇,并最終引發(fā)支架損壞,甚至出現(xiàn)頂板垮落等安全事故。因此,巷道長(zhǎng)期穩(wěn)定作為保證煤炭安全開采的關(guān)鍵一環(huán),在圍巖支護(hù)后,還應(yīng)該對(duì)巷道圍巖進(jìn)行有效的表面位移監(jiān)測(cè),從而保證在圍巖破裂之前及時(shí)發(fā)現(xiàn)并采取有效措施,避免巷道圍巖垮落,出現(xiàn)整體失穩(wěn)問題。
經(jīng)過多年發(fā)展,現(xiàn)有巷道圍巖表面位移監(jiān)測(cè)方法可分為接觸式和非接觸式測(cè)量方法。接觸式測(cè)量[3-5]通常依賴位移、壓力傳感器等傳統(tǒng)測(cè)量工具,雖然在實(shí)際工程中有良好的監(jiān)測(cè)效果,但依賴大量人工操作,測(cè)量效率低,而且操作人員安全難以保證。而非接觸式測(cè)量則是借助攝影技術(shù)或激光技術(shù)的新型測(cè)量技術(shù)[6-9],諸如:激光測(cè)距法、光學(xué)測(cè)繪法、光纖測(cè)量法等[10-13],雖然較接觸式測(cè)量方式有所改善,但仍存在著監(jiān)測(cè)效率低、測(cè)量范圍小,受限于井下環(huán)境等諸多不足之處。
鑒于當(dāng)前巷道圍巖變形監(jiān)測(cè)方法的不足,本文提出一種基于三維激光點(diǎn)云技術(shù)的巷道斷面提取與表面位移分析方法,三維激光掃描具有高效率、高精度、大范圍以及低光線要求等優(yōu)點(diǎn)。通過設(shè)計(jì)適合煤礦巷道的點(diǎn)云數(shù)據(jù)處理分析方法,利用巷道中軸線擬合、巷道斷面提取、斷面變形監(jiān)分析等步驟實(shí)現(xiàn)煤礦巷道變形分析。
1 方法流程
實(shí)驗(yàn)采用三維激光掃描儀進(jìn)行試驗(yàn),通過360°掃描實(shí)現(xiàn)三維立體圖像生成,具有耐受環(huán)境光、極遠(yuǎn)測(cè)距、高度精準(zhǔn)等優(yōu)點(diǎn)。三維激光掃描儀在進(jìn)行煤礦巷道變形監(jiān)測(cè)中,是基于激光束的發(fā)射和接收,通過測(cè)量激光束在巷道表面的反射,加以處理獲取三維空間信息,生成巷道表面點(diǎn)云數(shù)據(jù)。
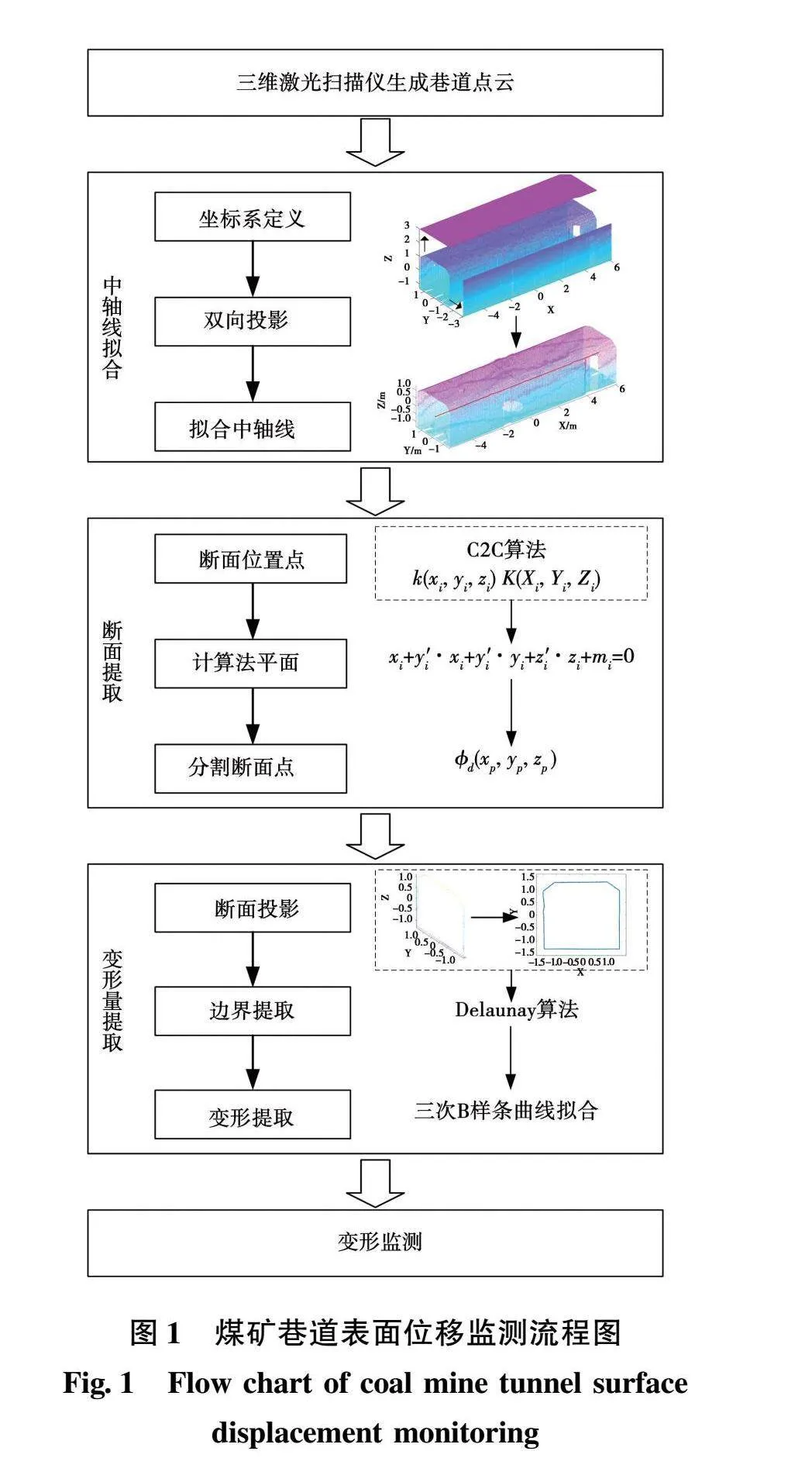
后續(xù)巷道點(diǎn)云數(shù)據(jù)處理是實(shí)現(xiàn)巷道變形分析的核心。本研究中,基于三維激光點(diǎn)云的巷道變形分析方法的具體原理為:首先,基于三維激光掃描儀生成巷道表面點(diǎn)云數(shù)據(jù),通過雙向投影法結(jié)合二次曲線擬合獲取三維巷道點(diǎn)云中軸線;然后,利用精度較低的C2C(cloud-to-cloud distance)方法提取斷面位置點(diǎn),并依據(jù)巷道中軸線以及斷面位置點(diǎn)的切線及法平面求取巷道斷面并對(duì)斷面點(diǎn)云進(jìn)行投影和XOY平面轉(zhuǎn)化;最后通過邊界點(diǎn)提取、點(diǎn)云分割、三次B樣條擬合等步驟后得到表征巷道兩幫、頂板與底板的曲線,并以此曲線進(jìn)行分析對(duì)比得到巷道表面位移數(shù)據(jù),實(shí)現(xiàn)巷道表面位移監(jiān)測(cè),基于三維激光點(diǎn)云的巷道變形分析方法原理圖如圖1所示。
2 巷道斷面提取與變形量監(jiān)測(cè)方法
2.1 巷道中軸線擬合
2.1.1 全局坐標(biāo)系及點(diǎn)云數(shù)據(jù)來源
本研究方法中所利用的數(shù)據(jù)為三維激光掃描設(shè)備所采集的三維空間點(diǎn)坐標(biāo),為方便后續(xù)變形量監(jiān)測(cè),在所采集的巷道點(diǎn)云數(shù)據(jù)中定義X軸正向?yàn)橄锏姥由旆较颍琙軸為右手系定義方向,指向正上方,如圖2所示。
本研究過程所使用的點(diǎn)云模型皆為自采數(shù)據(jù),且采集場(chǎng)景位于與煤礦巷道結(jié)構(gòu)、環(huán)境相似的地下防空洞,以確保研究結(jié)果真實(shí)有效。
2.1.2 中軸線擬合
通常實(shí)際巷道的延伸方向會(huì)以曲線的方式呈現(xiàn),因此首先需要提取巷道的中軸線來表征巷道整體延伸方向并作為巷道斷面的提取基準(zhǔn)。本方法采用基于點(diǎn)云數(shù)據(jù)雙向投影來進(jìn)行巷道中軸線的提取,該方法將空間三維點(diǎn)云投影到XOY以及XOZ平面中,并提取投影點(diǎn)云中的邊界點(diǎn),然后求取上下邊界點(diǎn)中間均值,以此擬合的曲線作為巷道中軸線[14-15],其具體步驟如下:
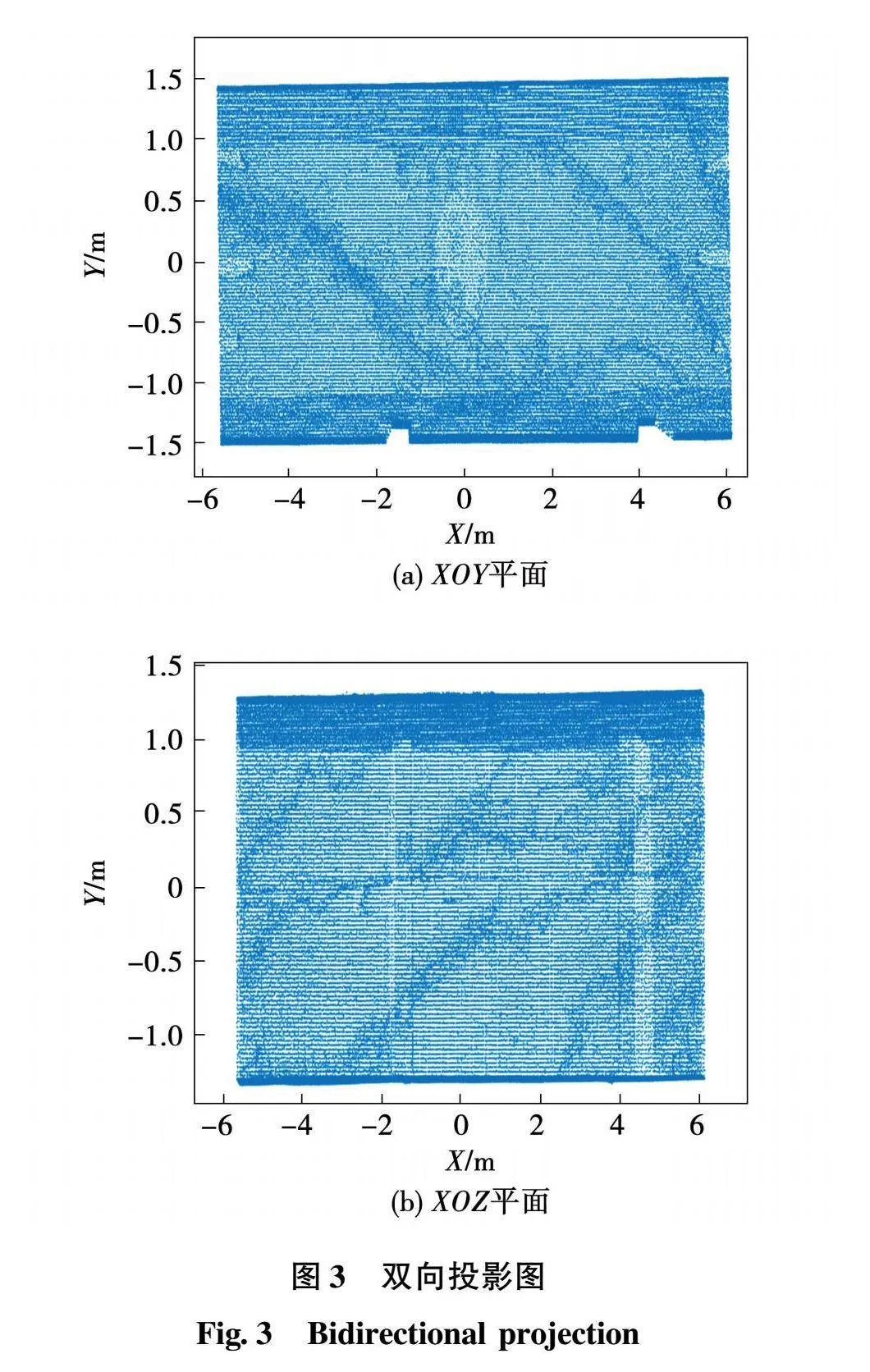
1)利用坐標(biāo)賦值的方法將三維點(diǎn)云[xi,yi,zi]中的zi與yi分別賦值為0,即可將點(diǎn)云投影至XOY以及XOZ平面內(nèi),其投影圖如圖3所示。
2)將點(diǎn)云數(shù)據(jù)分別投影至XOY平面和XOZ平面后,從X方向的最小值開始,設(shè)置Δx=0.01m的步長(zhǎng),X坐標(biāo)每前進(jìn)一個(gè)步長(zhǎng),即在xi+Δx范圍內(nèi)搜索投影點(diǎn)云Y、Z坐標(biāo)值中的最大值和最小值,求取其中點(diǎn)進(jìn)而擬合中軸線,計(jì)算如式(1)所示:
yi=yi(max)+yi(min)2
zi=zi(max)+zi(min)2(1)
式中:yi(max)、yi(min)、zi(max)、zi(min)分別表示xi+Δx范圍內(nèi)Y值與Z值的最大值和最小值,單位為m。
同時(shí),考慮到投影點(diǎn)云存在的離散噪聲點(diǎn)造成所取最值并非投影邊界點(diǎn),進(jìn)而影響中軸線擬合精度的情況,在此加入拉依達(dá)檢測(cè),剔除最值點(diǎn)集合中的離散點(diǎn)。
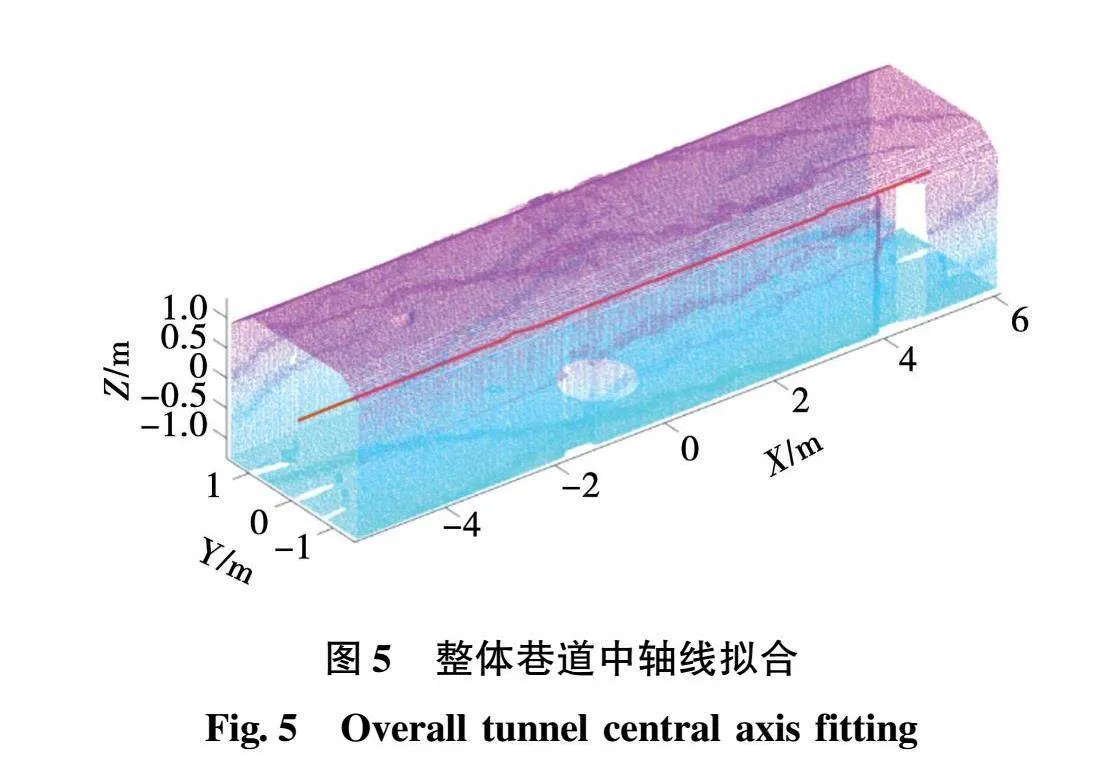
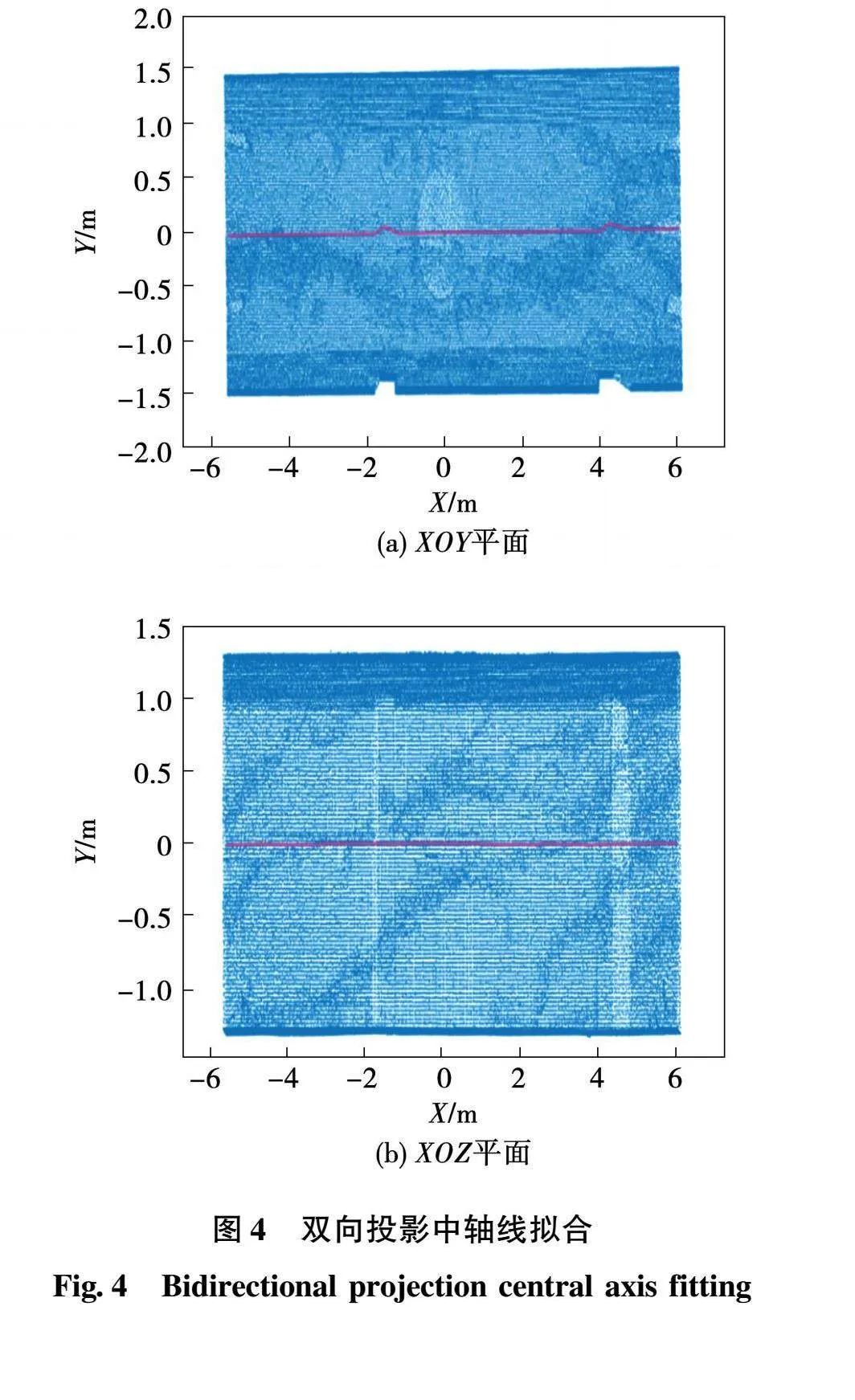
3)將xi與yi、xi與zi分別按照式(2)進(jìn)行二次曲線擬合,其投影面擬合中軸線結(jié)果如圖4所示,在整體巷道中擬合結(jié)果如圖5所示。擬合的巷道中軸線可表示為
y=f(x)=a0+a1x+a2x2
z=g(x)=b0+b1x+b2x2(2)
2.2 巷道斷面提取
2.2.1 斷面位置點(diǎn)提取
斷面變形分析作為一種高精度的變形分析方法,其運(yùn)算步驟多,運(yùn)算量大。對(duì)于較長(zhǎng)巷道而言若提取斷面數(shù)量增多則分析時(shí)間隨之增加,而斷面提取數(shù)量減少則會(huì)出現(xiàn)監(jiān)測(cè)缺失區(qū)域。針對(duì)該問題本文首先引入C2C算法對(duì)巷道進(jìn)行整體變形分析,然后提取變形顯著位置進(jìn)一步利用斷面分析求取變形量。
基于C2C算法對(duì)比該段巷道進(jìn)行整體變形,需要找出其中坐標(biāo)變換最大的一點(diǎn),記為k(xi,yi,zi);并找出與該點(diǎn)對(duì)應(yīng)的中軸線上的點(diǎn)K(Xi,Yi,Zi),此點(diǎn)即為初始斷面位置點(diǎn)。
以初始斷面位置點(diǎn)為起點(diǎn),分別向兩邊以一定距離取其他斷面位置點(diǎn),并考慮彎曲巷道情況引入XOY平面中軸線曲率作為判別條件,曲率越大的斷面位置點(diǎn)間的間距越小。
2.2.2 法平面提取
獲取巷道某一變形區(qū)域內(nèi)坐標(biāo)變換最大一點(diǎn)k(xi,yi,zi)后,即可在中軸線上搜索與之對(duì)應(yīng)的點(diǎn)K(Xi,Yi,Zi),利用這兩點(diǎn)所構(gòu)成向量與中軸線上K(Xi,Yi,Zi)位置切向量垂直的方式提取:
u=(Xi-xi,Yi-yi,Zi-zi)
v=(1,y′i,z′i),y′=dyidxi,z′=dzidxi
u·v=0(3)
式中:u為ki點(diǎn)與Ki點(diǎn)構(gòu)成的向量;v為Ki點(diǎn)的切向量。
在得到Ki點(diǎn)的切向量的同時(shí)即可得到該點(diǎn)處的法平面,即所求巷道斷面切面,其計(jì)算公式如下:
xi+y′ixi+y′iyi+z′izi+mi=0(4)
同理,可以得到Ki+1點(diǎn)處的平面方程:
xi+1+y′i+1xi+1+y′i+1yi+1+z′i+1zi+1+mi+1=0(5)
2.2.3 斷面提取
根據(jù)式(6)計(jì)算并提取巷道斷面點(diǎn)云并將其記為φd(xp,yp,zp):
xp+y′ixp+y′iyp+z′izp+mi1+y′2i+z′2i≤d2(6)
式中:d為斷面厚度,單位為m。
2.3 變形分析
2.3.1 斷面點(diǎn)云投影
獲得斷面點(diǎn)集φd(xp,yp,zp)后,將其中所有點(diǎn)投影至Ki點(diǎn)所在法平面,其主要思路為:利用投影垂線與法平面向量平行的特性,通過推導(dǎo)出的投影公式可以計(jì)算出某點(diǎn)在某一特定平面內(nèi)的投影點(diǎn),其計(jì)算過程如下:
ΔxpΔypΔzp=xp+y′ixp+y′iyp+z′izp+mi1+y′2i+z′2i·1y′z′(7)
XPYPZP=xPyPyP-ΔxpΔypΔzp(8)
式中:Δxp、Δyp、Δzp分別表示點(diǎn)(xp,yp,zp)投影后在坐標(biāo)軸3個(gè)方向上的位移變化量,m;(Xp,Yp,Zp)為投影后對(duì)應(yīng)點(diǎn)。
2.3.2 投影點(diǎn)轉(zhuǎn)化至XOY平面
為減少后續(xù)邊界點(diǎn)提取及輪廓線擬合的難度,并提高監(jiān)測(cè)精度,本文利用剛體變換前后保證物體大小和形狀不變的特性,將投影點(diǎn)構(gòu)成的點(diǎn)集作為剛體并通過三維空間變換轉(zhuǎn)化至XOY平面,將空間投影點(diǎn)轉(zhuǎn)化為平面投影點(diǎn),以方便后續(xù)點(diǎn)云數(shù)據(jù)處理,其步驟如下:
1)求取旋轉(zhuǎn)軸以及旋轉(zhuǎn)角,即求解垂直于原平面法向量u與目標(biāo)平面法向量w(0, 0, 1)的向量n(q, w, e)以及u與w之間的夾角φ,計(jì)算方法如下所示:
n=u×w(9)
cosθ=u×w|u||w|(10)
2)利用旋轉(zhuǎn)軸n和夾角φ,根據(jù)羅德里格斯公式[16]可以得到旋轉(zhuǎn)矩陣 。
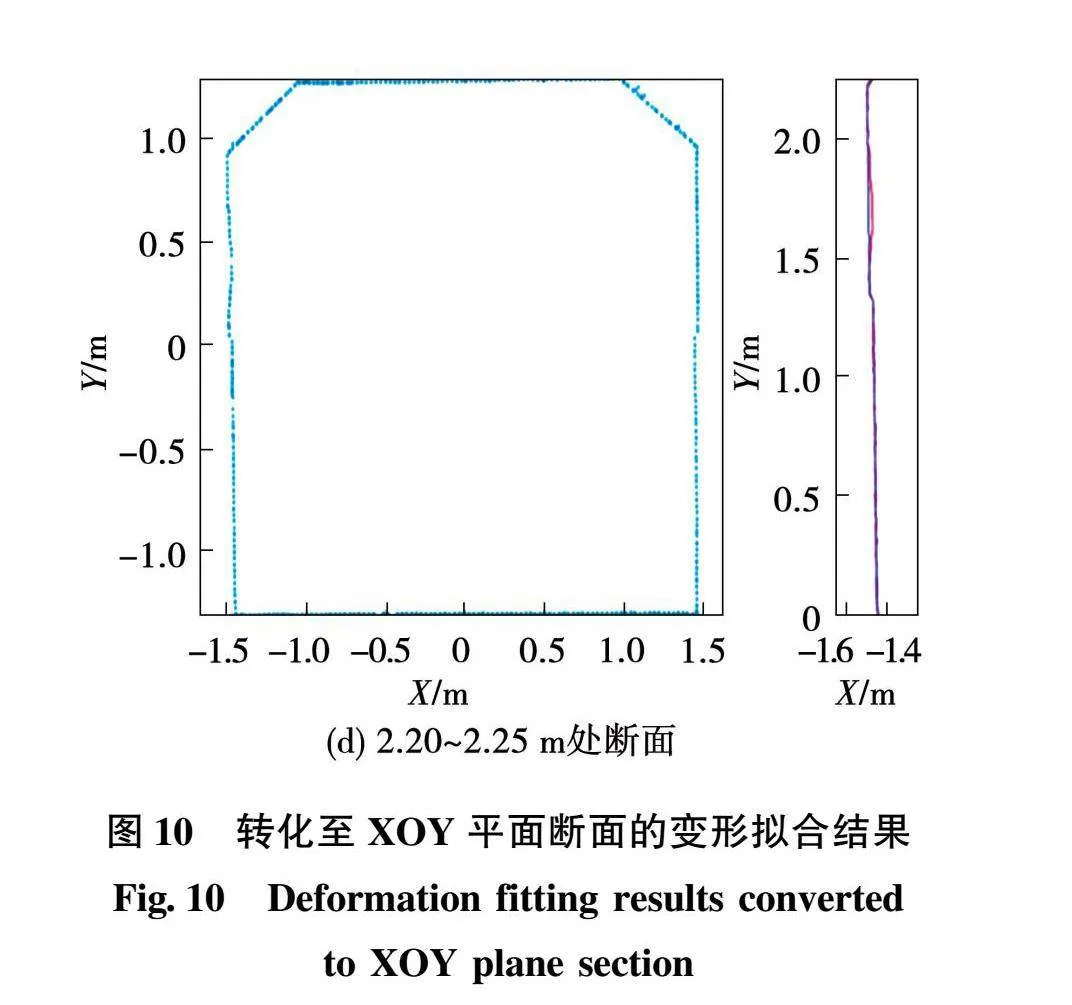
3)對(duì)點(diǎn)云數(shù)據(jù)坐標(biāo)左乘旋轉(zhuǎn)矩陣R,即可得到旋轉(zhuǎn)后的點(diǎn)云Φ′i,斷面點(diǎn)云投影與轉(zhuǎn)化如圖6所示。
Φ′i=R·Φi(11)
2.3.3 邊界點(diǎn)提取
原始巷道表面數(shù)據(jù)中通常包含有不屬于兩幫上的點(diǎn),如懸空電纜、照明物、運(yùn)輸管道等。因此,為保證搜索所得點(diǎn)云數(shù)據(jù)盡可能都為巷道表面數(shù)據(jù),在斷面輪廓線擬合之前,需要從點(diǎn)云數(shù)據(jù)中濾除非內(nèi)壁數(shù)據(jù)。
該步驟目的類似于點(diǎn)云群邊界點(diǎn)提取,可以借助Delaunay算法求得[17-18],其計(jì)算原理為:在點(diǎn)云三角網(wǎng)格劃分時(shí),邊界點(diǎn)所連接的直線只會(huì)是一個(gè)三角形的一邊,而非邊界點(diǎn)連接的直線為兩個(gè)三角形的共用邊,以此為判斷依據(jù)來濾除非邊界點(diǎn),保留邊界點(diǎn)[19]。
2.3.4 基于斷面輪廓線擬合變形分析
傳統(tǒng)巷道或隧道變形監(jiān)測(cè)中所監(jiān)測(cè)對(duì)象為通常為橢圓形,可以直接利用擬合橢圓的方式為變形量的提取提供依據(jù)。但在本文煤礦巷道的背景下,該方法不再適用,因此本文采用分割擬合邊界的方法分析巷道表面位移,即將巷道投影邊界點(diǎn)按照矩形的四邊進(jìn)行點(diǎn)云分割,左右豎邊分別為巷道左右兩幫,上下兩邊為巷道頂板與底板,進(jìn)而分別將四邊擬合為曲線,最后利用兩期點(diǎn)云擬合出的四條曲線,分別進(jìn)行巷道表面位移分析,其具體步驟如下:
1)在x軸方向設(shè)置步進(jìn)長(zhǎng)度,每個(gè)步進(jìn)長(zhǎng)度內(nèi)y值最大的點(diǎn)即為斷面輪廓線上邊所在點(diǎn),y值最小點(diǎn)即為斷面輪廓線下邊所在點(diǎn)。同理,在y軸方向設(shè)置步進(jìn)長(zhǎng)度,提取出左右兩邊最值點(diǎn)即矩形斷面輪廓兩幫所在點(diǎn)。
2)對(duì)提取出的矩形四邊點(diǎn)進(jìn)行三次B樣條曲線擬合[20-22]。
3)在未變形曲線與變形曲線中取等距離的采樣點(diǎn),計(jì)算對(duì)應(yīng)采樣點(diǎn)間的距離即可得到變形量。
步驟1)中步進(jìn)長(zhǎng)度的選取遵循“點(diǎn)少取大,點(diǎn)多取小”的原則。即如果獲得的點(diǎn)云數(shù)據(jù)非常密集,我們?cè)谶x取步長(zhǎng)時(shí)就可以選取較小的值;同理,點(diǎn)云數(shù)據(jù)稀疏,就選取較大的步長(zhǎng)值。本文中根據(jù)點(diǎn)云的稀疏程度與運(yùn)行時(shí)間,我們將步長(zhǎng)設(shè)置為0.1m。
3 實(shí)驗(yàn)驗(yàn)證
3.1 實(shí)驗(yàn)方案設(shè)計(jì)及數(shù)據(jù)采集
本文選擇地下防空洞某段巷道作為模擬煤礦巷道實(shí)驗(yàn)場(chǎng)所。巷道點(diǎn)云數(shù)據(jù)所采用的三維激光掃描儀標(biāo)稱掃描距離100m,單點(diǎn)掃描精度5mm,掃描視場(chǎng)水平方向360°,垂直方向優(yōu)于285°。
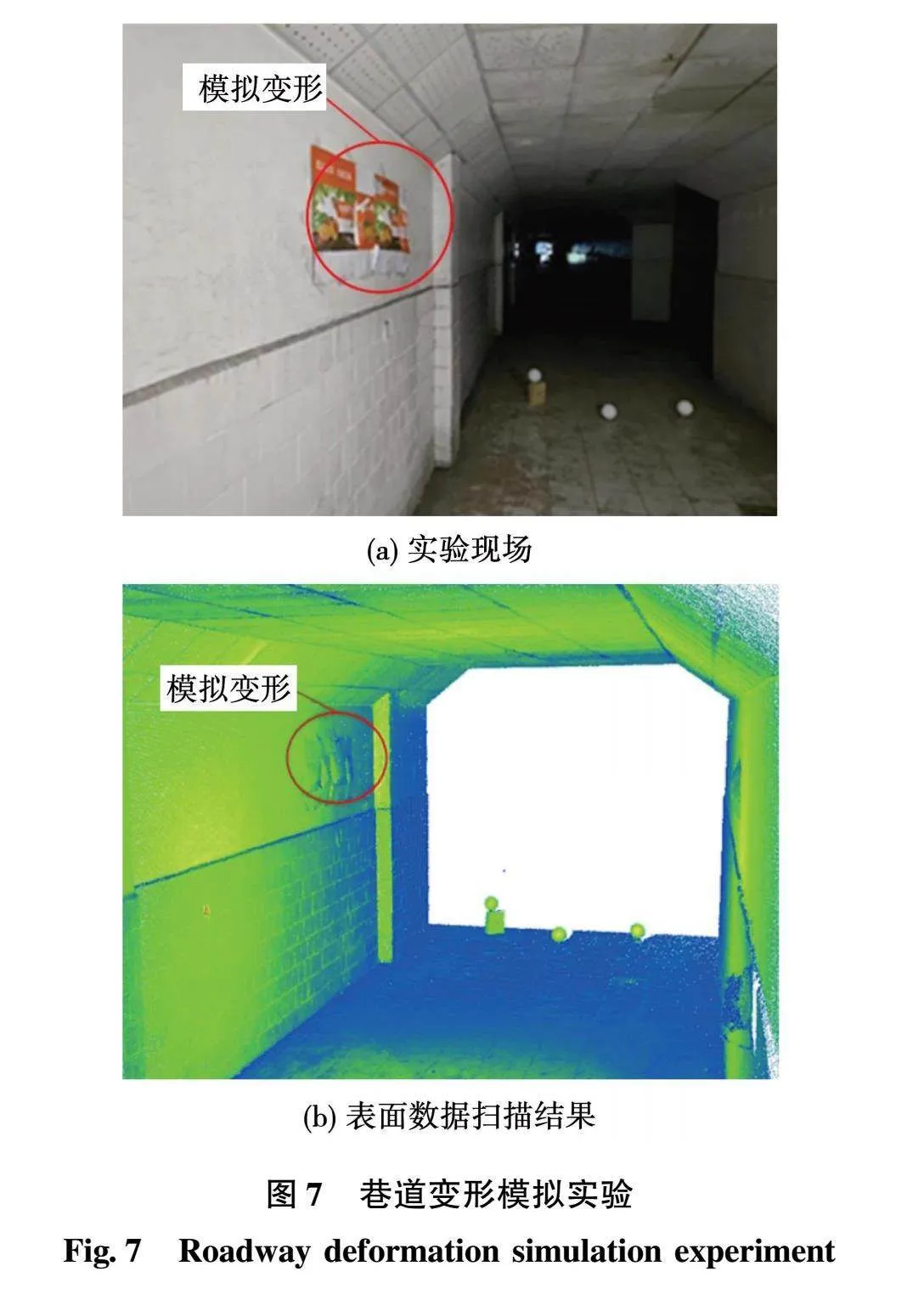
本實(shí)驗(yàn)利用不均勻紙板模擬巷道某一區(qū)域兩幫發(fā)生變形,通過將其固定在模擬巷道左幫上,模擬真實(shí)巷道兩幫移近產(chǎn)生的變形現(xiàn)象,監(jiān)測(cè)區(qū)間內(nèi)布置三個(gè)球形標(biāo)靶用以截取相同區(qū)段巷道點(diǎn)云。巷道變形模擬實(shí)驗(yàn)現(xiàn)場(chǎng)及其對(duì)應(yīng)的表面數(shù)據(jù)掃描結(jié)果如圖7所示。
3.2 巷道斷面多期監(jiān)測(cè)數(shù)據(jù)處理與形變分析
3.2.1 點(diǎn)云配準(zhǔn)與變形點(diǎn)提取
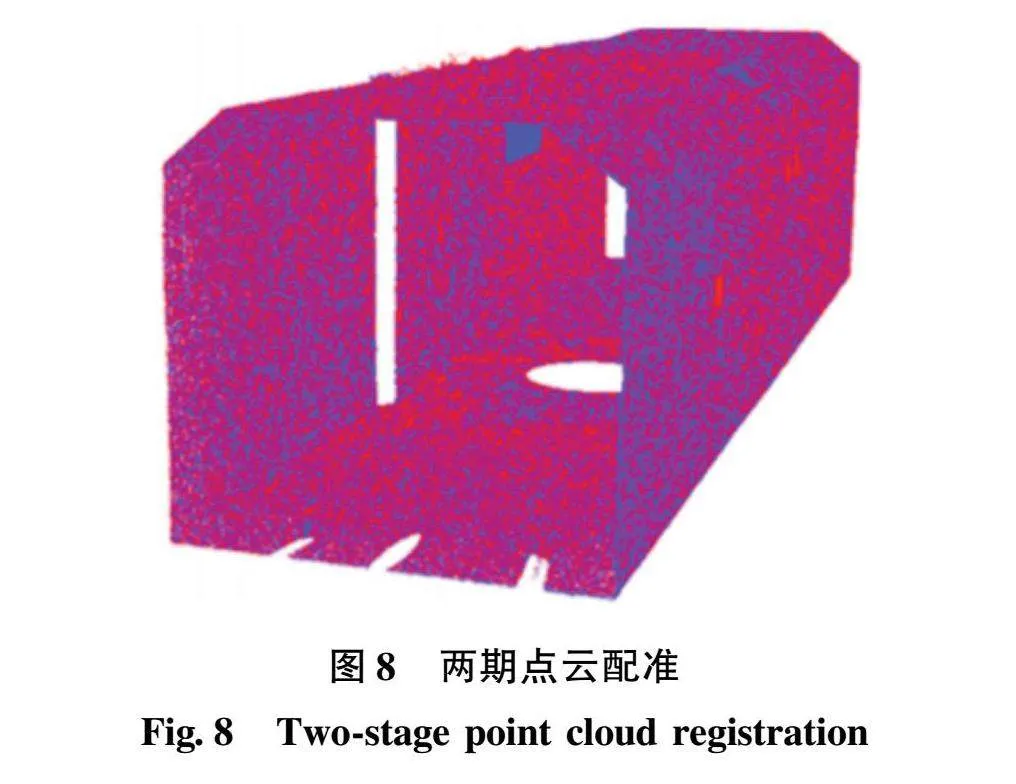
本文研究?jī)?nèi)容為基于巷道斷面提取的表面位移監(jiān)測(cè)方法,因此為減少表面位移監(jiān)測(cè)誤差,利用標(biāo)靶球?qū)善趻呙钄?shù)據(jù)轉(zhuǎn)換至同一坐標(biāo)系下。在該處我們將掃描數(shù)據(jù)轉(zhuǎn)換在同一坐標(biāo)系采用的是二次配準(zhǔn)的方法。第一次配準(zhǔn),首先利用兩次掃描過程中球形標(biāo)靶位置不變的條件,利用點(diǎn)對(duì)匹配,將兩次掃描數(shù)據(jù)進(jìn)行剛性變換。第二次配準(zhǔn),利用ICP等精配準(zhǔn)算法將兩次掃描數(shù)據(jù)進(jìn)行精細(xì)配準(zhǔn)。經(jīng)過二次配準(zhǔn),獲得的兩次掃描數(shù)據(jù)就被轉(zhuǎn)換在同一坐標(biāo)系之中。實(shí)驗(yàn)過程中,需保證在兩次掃描過程中球形標(biāo)靶位置不變。
圖8為兩期巷道表面數(shù)據(jù)配準(zhǔn)至同一坐標(biāo)系下的點(diǎn)云圖,紅色為未模擬變形點(diǎn)云,藍(lán)色為模擬變形點(diǎn)云。
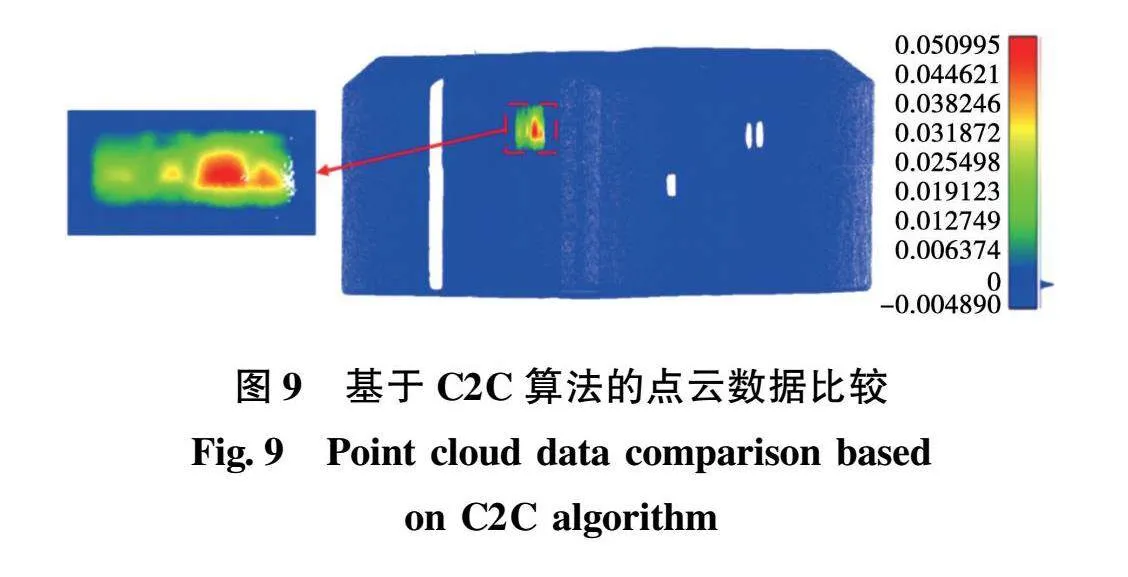
實(shí)驗(yàn)選擇模擬變形巷道的區(qū)間長(zhǎng)度為20m,根據(jù)本文所提出的斷面變化自動(dòng)監(jiān)測(cè)方法,首先,利用Cloud Compare軟件中的C2C點(diǎn)云比較功能對(duì)比兩期點(diǎn)云數(shù)據(jù),
找出變形區(qū)域內(nèi)的最值點(diǎn),如圖9所示。然后,利用第1期點(diǎn)云數(shù)據(jù)提取出巷道中軸線,同時(shí)第2期點(diǎn)云數(shù)據(jù)的中軸線以第1期數(shù)據(jù)中軸線代替。最后,以每個(gè)變形區(qū)域最大變形值點(diǎn)為中心,分別向兩邊截取若干斷面,直到該變形區(qū)域最小變形值點(diǎn)結(jié)束。圖9左側(cè)的點(diǎn)云比較區(qū)域放大圖中,不同顏色表征變形量的大小不同,由藍(lán)色至紅色表示變形量依次增加。從圖9中可以很清晰的看出,變形量監(jiān)測(cè)結(jié)果整體以長(zhǎng)方形的形式呈現(xiàn),長(zhǎng)方形區(qū)域外其顏色皆為藍(lán)色,說明變形量為零,與圖7(a)中的實(shí)際模擬變形形狀相同。同時(shí),圖9中變形區(qū)域左側(cè)以綠色為主,意味著變形量較小,且整體變化不大,右側(cè)區(qū)域則出現(xiàn)紅色變形部分,并以最大變形位置向四周擴(kuò)散,且整個(gè)變形色譜圖出現(xiàn)3個(gè)明顯的凹陷部分,符合模擬變形呈現(xiàn)的規(guī)律。
3.2.2 斷面提取及變形分析
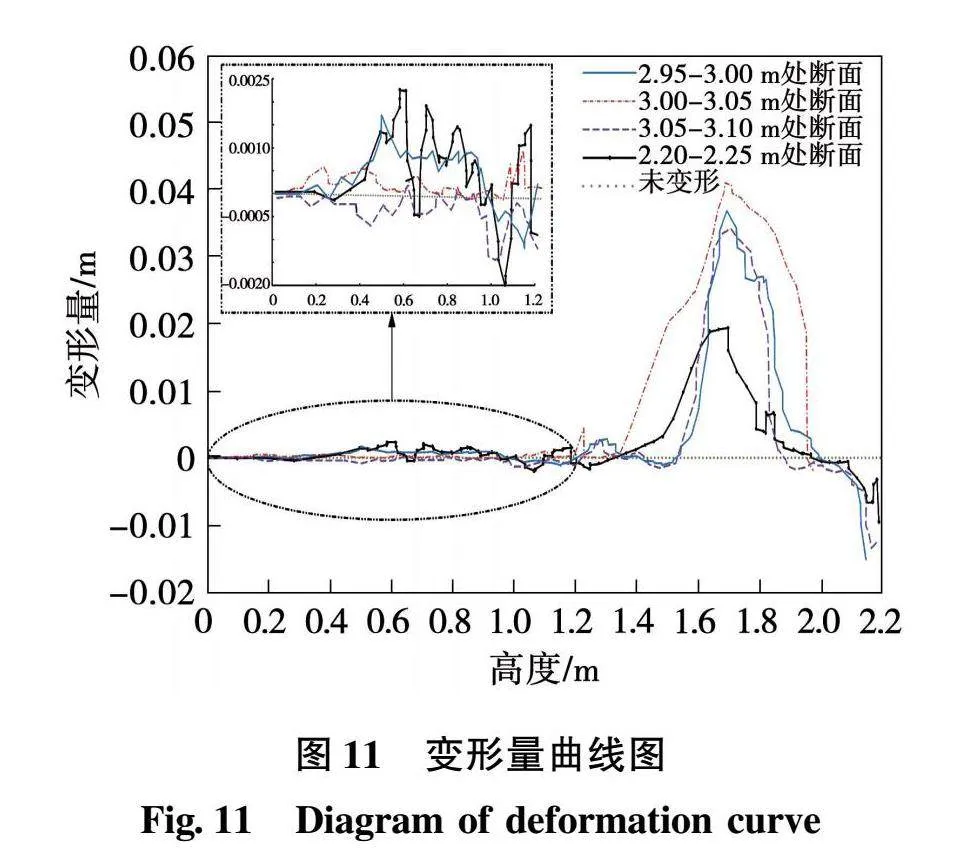
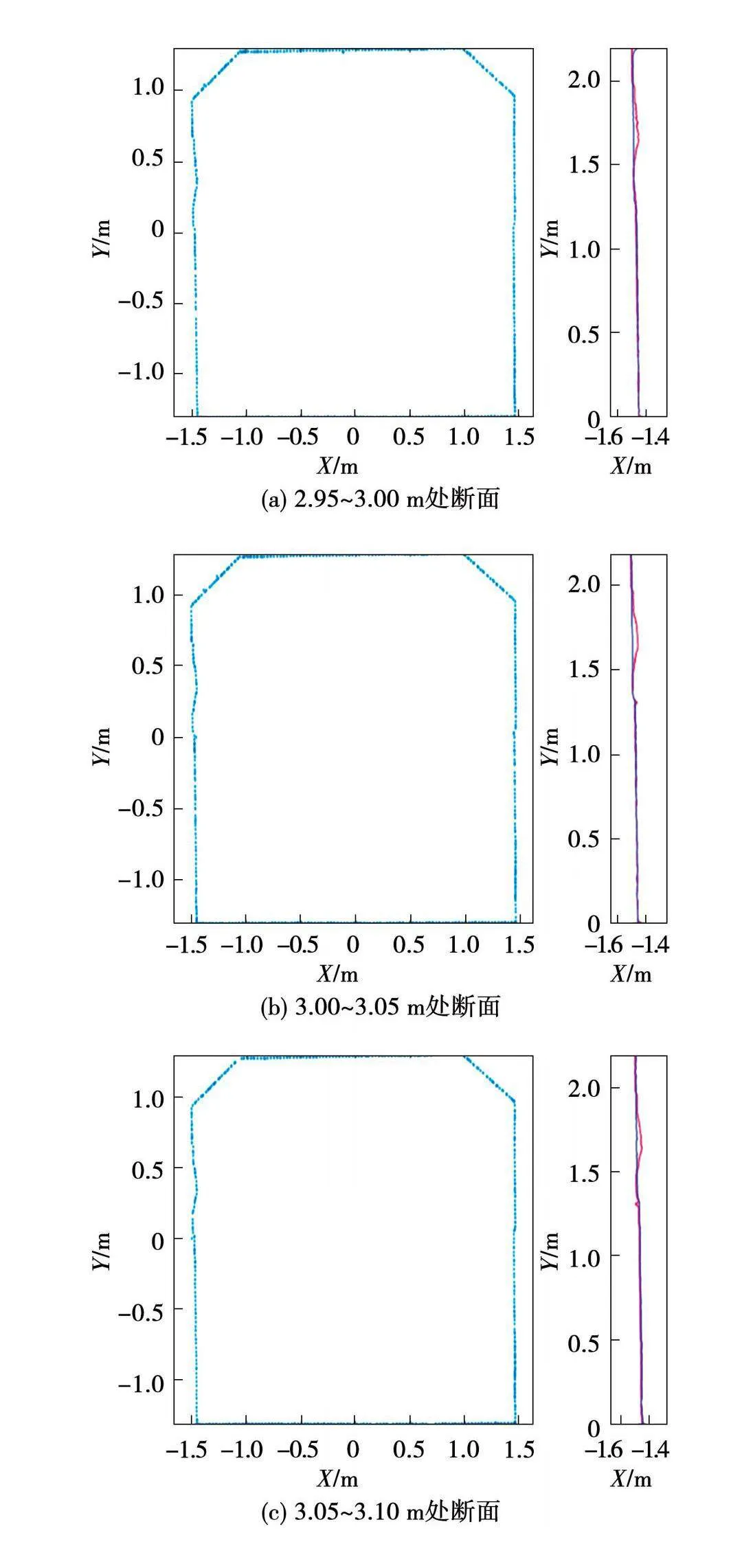
通過上一節(jié)對(duì)圖9的分析,我們可以初步定位最大變形值點(diǎn)位區(qū)域。由于在軟件中我們可以確定巷道的真實(shí)長(zhǎng)度,所以根據(jù)圖中的顏色對(duì)應(yīng)的變形位置就可以得出最大變形值點(diǎn)位范圍。利用Cloud Compare軟件中的C2C點(diǎn)云比較功能對(duì)比兩期數(shù)據(jù),初步定位最大變形值點(diǎn)位于所截取部分巷道3m附近。基于本文所提出的巷道斷面提取方法,以初步定位結(jié)果為中心點(diǎn)向兩端按照0.05m的斷面厚度截取若干巷道斷面,通過斷面投影轉(zhuǎn)化、邊界點(diǎn)提取與邊界輪廓擬合處理巷道斷面,最后進(jìn)行表面位移量提取。通過比較不同斷面的變形量,所監(jiān)測(cè)到的變形范圍為模擬巷道1.94m至3.20m的區(qū)域,變形區(qū)域長(zhǎng)度為1.26m,與模擬變形范圍一致。進(jìn)一步,選擇2.95~3.00m處斷面、3.00~3.05m處斷面、3.05~3.10m處斷面、2.20~2.25m處斷面進(jìn)行具體分析,擬合結(jié)果如圖10所示,其中,左圖為每個(gè)斷面轉(zhuǎn)化至XOY平面的點(diǎn)云圖,右圖為利用三次B樣條擬合的巷道左幫斷面曲線,藍(lán)色為未變形曲線,紅色為變形曲線,4處斷面的變形量曲線如圖11所示。
由圖10可以看出,在最大變形點(diǎn)周圍所取的每一個(gè)斷面轉(zhuǎn)化至XOY平面后都可以清晰的看出巷道左幫所模擬的變形情況。同時(shí),將分割出的巷道左幫用三次B樣條曲線擬合后發(fā)現(xiàn)其變化趨勢(shì)與點(diǎn)云圖高度吻合,并且曲線圖中所顯示的變形位置在1.5m至2m的高度范圍之間,與實(shí)際模擬變形放置位置一致,驗(yàn)證了巷道四幫分割擬合求取變形方法的有效性。此外,圖10中還展示了2.20~2.25m處斷面的變形曲線,可以看出,無論整體變形量還是最大變形量相較于最大變形點(diǎn)周圍都偏小,與Cloud Compare軟件中C2C方法所得出的結(jié)論可以相互對(duì)照,驗(yàn)證了本文所提方法的準(zhǔn)確性。
根據(jù)從圖11中的4個(gè)斷面所生成的巷道左幫變形曲線能夠看出,最大變形點(diǎn)位于所截取巷道3.00~3.05m處,最大變形量為0.0424m,而2.20~2.25m斷面處所得最大變形量為0.019m,二者相差0.023m與實(shí)驗(yàn)中模擬的變形情況相吻合,證明了該方法所具備的變形監(jiān)測(cè)分辨率能夠達(dá)到厘米級(jí);與此同時(shí)2.95~3.00m處斷面與3.05~3.10m處斷面最大變形量分別為0.0366m與0.0341m,其值相近并且同時(shí)小于最大變形點(diǎn)變形量,與實(shí)驗(yàn)中所模擬的情況相同;在1.7m高度附近,4個(gè)斷面均出現(xiàn)最大變形量,符合實(shí)際情況,驗(yàn)證了該方法在定位巷道變形位置的可行性。
同時(shí),圖11中2.95~3.00m斷面變形曲線0m高度處的誤差由分割算法的精度不足產(chǎn)生,需要后續(xù)繼續(xù)改進(jìn),而其他位置變形量低于0m的位移監(jiān)測(cè)情況則是三次B樣條曲線擬合誤差造成,但該誤差較小,通常低于0.005m,其精度足以滿足巷道表面位移監(jiān)測(cè)需求。
4 結(jié) 論
本文提出了基于三維激光點(diǎn)云技術(shù)的巷道斷面提取與變形量分析方法,通過對(duì)實(shí)驗(yàn)巷道進(jìn)行變形模擬、數(shù)據(jù)采集、點(diǎn)云精簡(jiǎn)配準(zhǔn)、中軸線提取等步驟構(gòu)建了巷道點(diǎn)云斷面并利用點(diǎn)云投影轉(zhuǎn)化、點(diǎn)云分割、三次B樣條曲線擬合和變形量提取等方法實(shí)現(xiàn)了巷道表面位移的定量分析,其監(jiān)測(cè)分辨率能夠達(dá)到厘米級(jí)。基于巷道模擬實(shí)驗(yàn)結(jié)果,并與其他變形提取方法進(jìn)行了對(duì)比驗(yàn)證,驗(yàn)證了本方法的有效性與變形監(jiān)測(cè)的準(zhǔn)確性。
參 考 文 獻(xiàn):
[1] 康紅普, 王國(guó)法, 王雙明, 等. 煤炭行業(yè)高質(zhì)量發(fā)展研究[J]. 中國(guó)工程科學(xué), 2021, 23(5): 130.
KANG Hongpu, WANG Guofa, WANG Shuangming, et al. High-Quality Development of China’s Coal Industry[J]. Strategic Study of CAE, 2021, 23(5): 130.
[2] 謝和平, 高峰, 鞠楊, 等. 深部開采的定量界定與分析[J]. 煤炭學(xué)報(bào), 2015, 40(1): 1.
XIE Heping, GAO Feng, JU Yang, et al. Quantitative Definition and Investigation of Deep Mining[J]. Journal of China Coal Society, 2015, 40(1): 1.
[3] 譚云亮, 吳士良, 尹增德, 等. 礦山壓力與巖層控制[M]. 北京:煤炭工業(yè)出版社, 2008: 276.
[4] FENG X T, YAO Z B, LI S J, et al. In Situ Observation of Hard Surrounding Rock Displacement at 2400-m-Deep Tunnels[J]. Rock Mechanics & Rock Engineering, 2018, 51(3): 873.
[5] 李延河, 楊戰(zhàn)標(biāo), 朱元廣, 等. 基于弱光纖光柵傳感技術(shù)的圍巖變形監(jiān)測(cè)研究[J]. 煤炭科學(xué)技術(shù), 2023, 51(6): 1.
LI Yanhe, YANG Zhanbiao, ZHU Yuanguang, et al. Research on Deformation Monitoring of Surrounding Rock Based on Weak Fiber Grating Sensing Technology[J]. Coal Science and Technology, 2023, 51(6): 1.
[6] 林宇龍, 李冰, 白征東, 等. 組合激光雷達(dá)系統(tǒng)在輸電線路測(cè)量中的應(yīng)用[J]. 電測(cè)與儀表, 2023, 60(2): 32.
LIN Yulong, LI Bing, BAI Zhengdong, et al. Application of Combined Laser Radar System in Transmission Line Measurement[J]. Electrical Measurement & Instrumentation, 2023, 60(2): 32.
[7] 楊松林, 劉維寧, 王夢(mèng)恕, 等. 自動(dòng)全站儀隧道圍巖變形非接觸監(jiān)測(cè)及分析預(yù)報(bào)系統(tǒng)研究[J]. 鐵道學(xué)報(bào),2004, (3): 93.
YANG Songlin, LIU Weining, WANG Mengshu, et al. Study on the Auto-total Station System for Monitoring Analyzing and Forecasting Tunnel Country Rock Deformation[J]. Journal of the China Railway Society, 2004, (3): 93.
[8] 于志浩, 張艷榮, 張安迪, 等. 基于改進(jìn)RBPF的變電站巡檢機(jī)器人建圖方法研究[J]. 電測(cè)與儀表, 2023, 60(6): 26.
YU Zhihao, ZHANG Yanrong, ZHANG Andi, et al. Research on Mapping Method of Substation Inspection Robot Based on Improved RBPF[J]. Electrical Measurement & Instrumentation, 2023, 60(6): 26.
[9] 付紅安, 王學(xué)平, 田帥, 等. 基于無人機(jī)激光雷達(dá)技術(shù)的輸電線路走廊清理方法[J]. 電測(cè)與儀表, 2019, 56(23): 146.
FU Hongan, WANG Xueping, TIAN Shuai, et al. Corridor Cleaning Method for Power Transmission Line Based on UAV LiDAR Technique[J]. Electrical Measurement & Instrumentation, 2019, 56(23): 146.
[10]范慶輝, 文勇, 周東, 等. 基于微光纖探頭及光學(xué)成像技術(shù)的位移測(cè)試系統(tǒng)的研究與設(shè)計(jì)[J]. 電測(cè)與儀表, 2021, 58(9): 152.
FAN Qinghui, WEN Yong, ZHOU Dong, et al. Design and Study of Displacement Measurement System Based on Micro-fiber Probe and Optical Imaging Technology[J]. Electrical Measurement & Instrumentation, 2021, 58(9): 152.
[11]牛廣琦, 楊宏民. XDC防爆型巷道斷面測(cè)量?jī)x的研制[J]. 礦業(yè)安全與環(huán)保, 1999 (4): 9.
NIU Guangqi, YANG Hongmin. Development of XDC Explosion-proof Tunnel Cross-section Measuring Instrument[J]. Mining Safety & Environmental Protection, 1999 (4): 9.
[12]米延華, 劉立新. 基于全站儀非接觸自動(dòng)監(jiān)測(cè)巷道圍巖變形及分析[J]. 測(cè)繪與空間地理信息, 2005, 28(3): 9.
MI Yanhua, LIU Lixin. Study on Non-contact Auto-monitoring and Analyzing of a Tunnel Country Rock Deformation Based on Total Station Measurement[J]. Geomatics & Spatial Information Technology, 2005, 28(3): 9.
[13]楊化奎, 溫巍. 基于機(jī)器視覺的巷道變形實(shí)時(shí)監(jiān)測(cè)與預(yù)警系統(tǒng)設(shè)計(jì)[J]. 煤炭技術(shù), 2021, 40(12): 219.
YANG Huakui, WEN Wei. Design of Real-time Monitoring and Early Warning System for Roadway Deformation Based on Machine Vision[J]. Coal Technology, 2021, 40(12): 219.
[14]李珵, 盧小平, 朱寧寧, 等. 基于激光點(diǎn)云的隧道斷面連續(xù)提取與形變分析方法[J]. 測(cè)繪學(xué)報(bào), 2015, 44(9): 1056.
LI Cheng, LU Xiaoping, ZHU Ningning, et al. Continuously Extracting Section and Deformation Analysis for Subway Tunnel Based on LiDAR Points[J]. Acta Geodaetica et Cartographica Sinica, 2015, 44(9): 1056.
[15]紀(jì)思源, 王同合, 張國(guó)龍, 等. 基于激光掃描點(diǎn)云的隧道斷面提取方法[J]. 測(cè)繪工程, 2017, 26(6): 66.
JI Siyuan, WANG Tonghe, ZHANG Guolong, et al. Application of Laser Scanning Point Clouds to the Subway Tunnel Section Extraction[J]. Engineering of Surveying and Mapping, 2017, 26(6): 66.
[16]湯念. 影像匹配點(diǎn)云與地面激光點(diǎn)云配準(zhǔn)技術(shù)研究[D]. 北京: 北京建筑大學(xué), 2021.
[17]楊忞婧, 劉麗, 張金蘭, 等. 三維激光掃描技術(shù)在曲面模型重建中的應(yīng)用[J]. 測(cè)繪與空間地理信息, 2016, 39(8): 158.
YANG Minjing, LIU Li, ZHANG Jinlan, et al. Application of Surface Model Reconstruction by 3D Laser Scanning Technology[J]. Geomatics & Spatial Information Technology, 2016, 39(8): 158.
[18]王果. 不同平臺(tái)激光點(diǎn)云數(shù)據(jù)面狀信息自動(dòng)提取研究[D]. 北京: 中國(guó)礦業(yè)大學(xué), 2014.
[19]呂釗. 基于地面激光掃描數(shù)據(jù)的建筑物變化檢測(cè)研究[D]. 北京: 中國(guó)地質(zhì)大學(xué), 2011.
[20]李虹, 劉松, 孫志毅, 等. 基于非均勻B樣條曲線的挖掘機(jī)最優(yōu)時(shí)間軌跡規(guī)劃[J]. 中國(guó)工程機(jī)械學(xué)報(bào), 2021, 19(4): 302.
LI Hong, LIU Song, SUN Zhiyi, et al. Optimal Time Trajectory Planning of Excavator Based on Non-uniform B-spline Curve[J]. Chinese Journal of Construction Machinery, 2021, 19(4): 302.
[21]裴魏魏, 倪海明, 戚大偉. 基于B樣條算法的樹干表面形貌三維重建研究[J]. 森林工程, 2019, 35(5): 57.
PEI Weiwei, NI Haiming, QI Dawei. Three Dimension Reconstruction Study of Tree Trunk Surface Shape Based on B-spline Algorithm[J]. Forest Engineering, 2019, 35(5): 57.
[22]李傳軍, 張世輝, 謝久明, 等. 基于3次B樣條曲線的快速直接插補(bǔ)技術(shù)研究[J]. 制造技術(shù)與機(jī)床, 2021, (7): 159.
LI Chuanjun, ZHANG Shihui, XIE Jiuming, et al. Fast Direct Interpolation Based on Cubic B-spline Curve[J]. Manufacturing Technology & Machine Tool, 2021, (7): 159.
(編輯:溫澤宇)
