
智能無人船在水下地形測量中的應用
2024-09-30 00:00:00劉娣何仁德
科技創(chuàng)新與應用 2024年28期




摘 要:該文通過闡述智能無人船系統(tǒng)和工作原理,并以湖南省某河道水下地形測量項目為例,介紹智能無人船在水下地形測量中的作業(yè)流程。隨后利用專業(yè)軟件處理繪制河道水下地形圖,并對成果進行精度檢驗,結(jié)果顯示數(shù)據(jù)符合要求。
關(guān)鍵詞:智能無人船;水下;地形測量;GNSS;技術(shù)應用
中圖分類號:U664.82 文獻標志碼:A 文章編號:2095-2945(2024)28-0185-04
Abstract: This paper expounds the system and working principle of the intelligent unmanned ship, and takes the underwater terrain survey of a river in Hunan Province as an example to introduce the operating process of the intelligent unmanned ship in underwater terrain survey. Then professional software is used to process and draw the underwater terrain map of the river, and the results are checked for accuracy. The results show that the data meet the requirements.
Keywords: intelligent unmanned ship; underwater; terrain measurement; GNSS; technology applications
隨著我國基礎(chǔ)測繪的推進,近幾年水利工程建設(shè)也在快速發(fā)展,而水利工程的建設(shè)離不開水下地形等基礎(chǔ)資料,因此,水下地形測量的精確度和效率性非常重要[1]。在水下地形測量中,傳統(tǒng)作業(yè)主要是測量人員坐著皮劃艇或者機動船方式利用RTK和測深儀分開測量點位和測深。這種方式由于船體較大,無法進入某些淺水區(qū)域,從而導致不能采集完整的高精度水下地形數(shù)據(jù)。有時為了獲取數(shù)據(jù)只能采用測量人員帶著RTK下水作業(yè),因此具有一定危險性。另外,不論是有人船方式還是人工下水方式,采集數(shù)據(jù)效率都比較低,精度往往也難以滿足要求[2]。
1 智能無人船的發(fā)展和應用
自2009年底開始, 國家海洋局第一海洋研究所無人船研究小組開展了無人船系統(tǒng)的研發(fā)與應用研究工作,無人船的系統(tǒng)配備技術(shù)開始不斷提高,無人船應用得以推廣。無人船可以無須人工,智能航行,其應用多為救援、監(jiān)測等工作[3]。經(jīng)過幾年的時間研究,無人船水下測量技術(shù)取得了一定的進展。2015年南方衛(wèi)星導航與云洲聯(lián)合研發(fā)的“方洲”號智能測量無人船問世,該無人船操作方式可選擇遙控器手動控制,也可通過衛(wèi)星定位導航在水面上自主航行。隨后安徽科微智能科技有限公司、上海華測導航技術(shù)股份有限公司、武漢中海達衛(wèi)星導航技術(shù)有限公司和武漢綠灣科技有限公司等先后研發(fā)了兼具各種功能的測量無人船,給水下測量帶來很大的便利[3]。
2 水下地形測量的工作原理
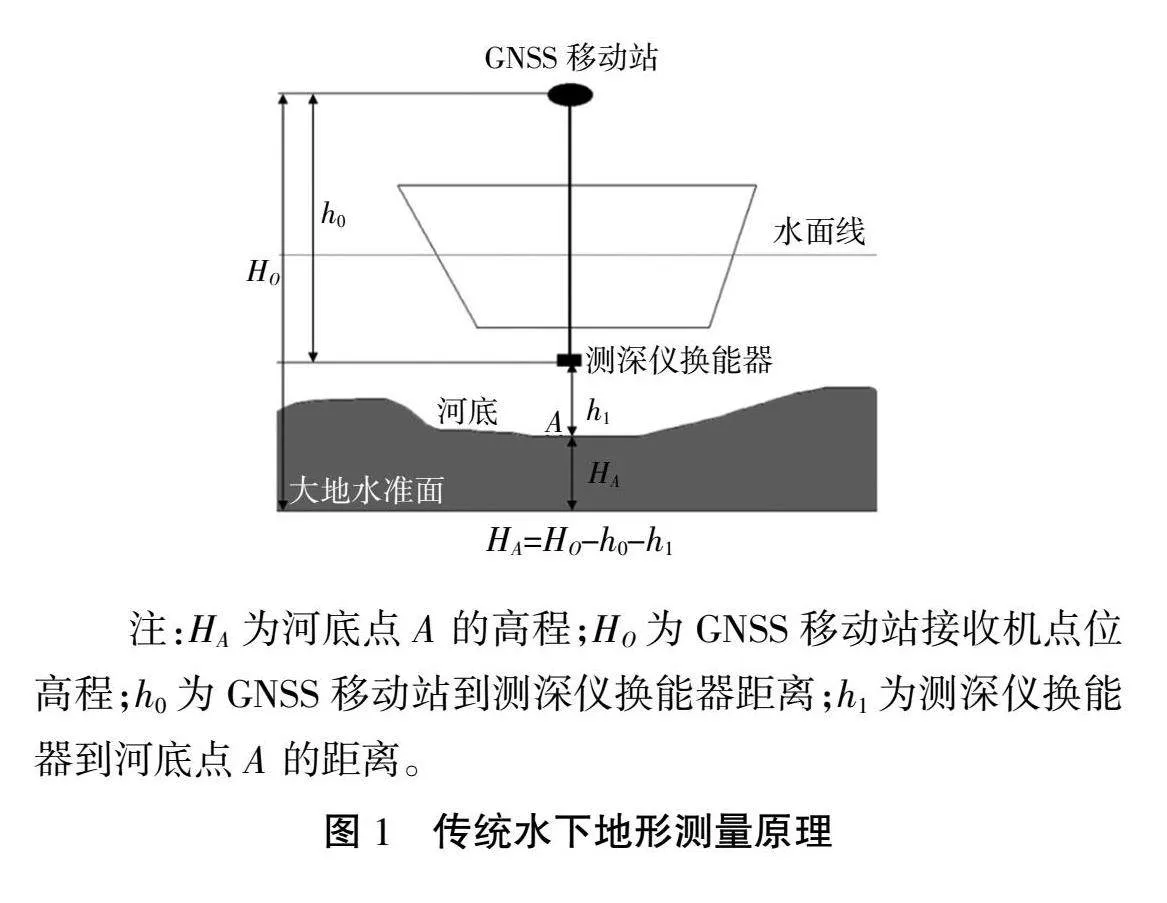
傳統(tǒng)水下地形測量在測量船上安置GNSS移動站和測深儀,并利用RTK技術(shù)和單波束探測技術(shù)分別獲取點的平面坐標數(shù)據(jù)和水深數(shù)據(jù),再經(jīng)過換算獲得水下地形點的三維坐標,最后繪制成地形圖[4]。原理如圖1所示,作業(yè)流程如圖2所示。
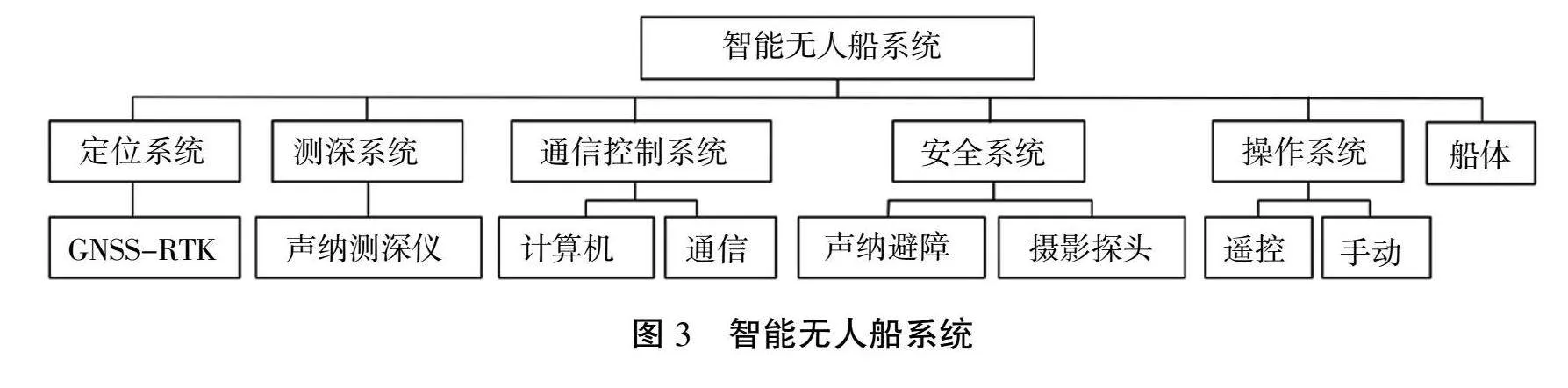
智能無人船將GNSS-RTK定位、聲吶測深、導航通信等多種技術(shù)集于一體,形成智能水下地形測量系統(tǒng)(圖3)并內(nèi)置到小型可遙控無人船[5],其作業(yè)流程如圖4所示。
3 應用實例
3.1 測區(qū)概況
湖南省某河道水下地形測量項目為河段治理實施項目,河流位于湖南省,治理區(qū)域長約7.0 km,河寬約200 m,主要測量區(qū)域范圍內(nèi)水下地形,河流蜿蜒曲折,整體自北西流向南西,兩測局部有邊灘,寬0~10 m。測圖比例尺為1∶1 000,岸上地形點間距為10~20 m,水下斷面間距為50 m,測點間距為12~15 m。
3.2 無人船選用
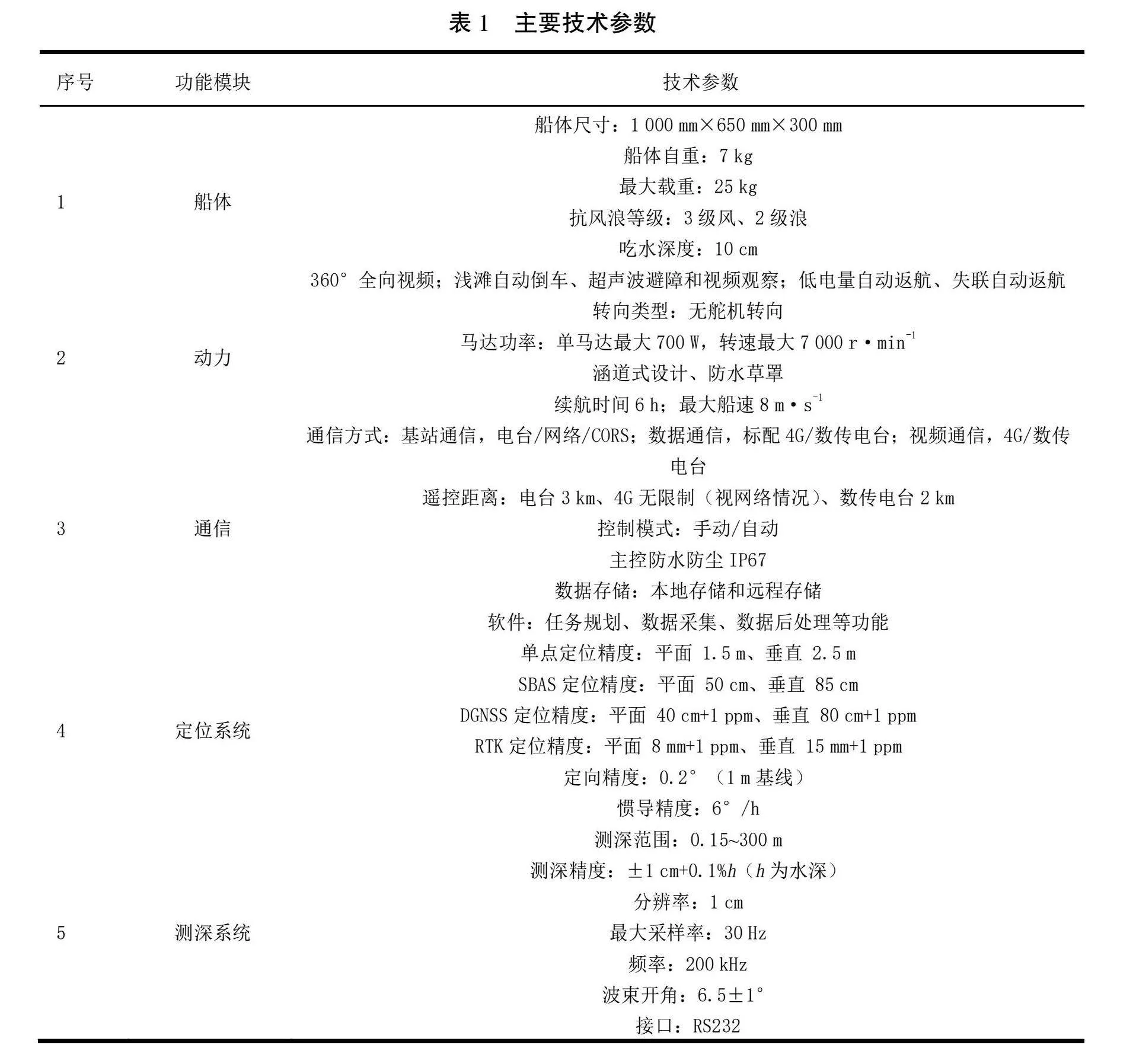
無人船選用專為河湖設(shè)計的華微3號無人船,它采用新一代物聯(lián)網(wǎng)主控,利用4G通信擺脫網(wǎng)橋基站、傳輸距離的限制,外業(yè)便利輕松。船體采用雙定位天線設(shè)計,船體姿態(tài)穩(wěn)定可靠,結(jié)合IMU模塊,可輕松穿橋洞;全新超速馬達,最高船速高達8 m/s,具有自動返航功能,其主要構(gòu)成如圖5所示,技術(shù)參數(shù)見表1。
3.3 準備工作
3.3.1 明確項目相關(guān)技術(shù)質(zhì)量要求
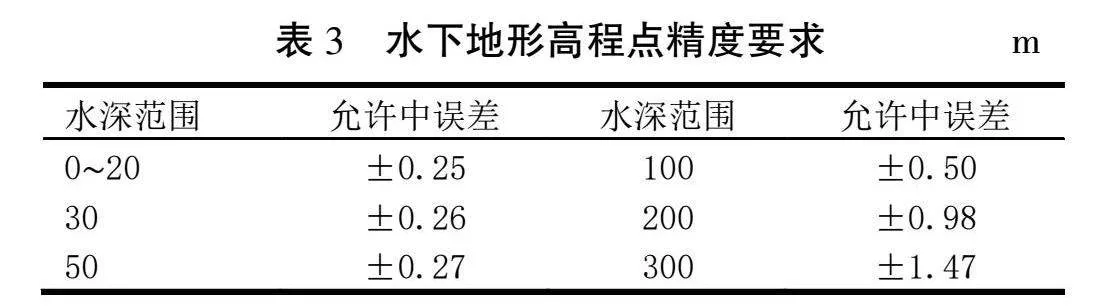
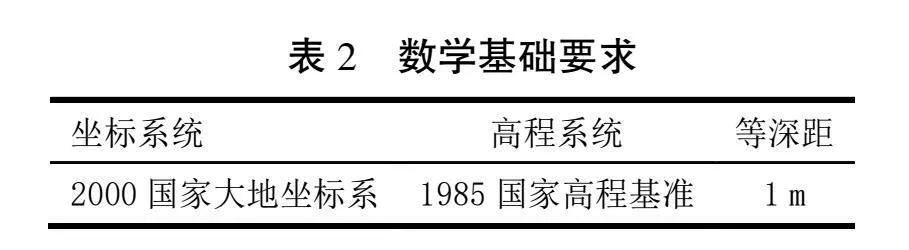
水下地形測量嚴格按SL 257—2017《水道觀測規(guī)范》中有關(guān)規(guī)定執(zhí)行。測量數(shù)學基礎(chǔ)要求見表2,水下地形高程點精度要求見表3。
3.3.2 制定智能無人船水下地形測量技術(shù)設(shè)計書
技術(shù)設(shè)計書內(nèi)容包括:①選擇合適的測量設(shè)備和儀器。通過現(xiàn)場踏勘結(jié)合技術(shù)質(zhì)量要求選擇合適的無人船、數(shù)據(jù)處理軟件等;②確定相關(guān)的技術(shù)參數(shù),如結(jié)合現(xiàn)場實際情況做好無人船航線規(guī)劃,制定好航行路線;③制定作業(yè)流程:測區(qū)踏勘→資料準備→設(shè)備安裝調(diào)試→參數(shù)設(shè)置→航行設(shè)置→姿態(tài)校準→數(shù)據(jù)采集與傳輸→數(shù)據(jù)處理→質(zhì)量檢查。此外,還要制訂好工期進度計劃、質(zhì)量安全保障措施等。
3.4 智能無人船在水下地形測量的實施
提前查看天氣預報,確定測量實施時間,做好相關(guān)的準備工作。在測量前進行無人船檢查,確保狀態(tài)正常,進行無人船在不同深度和不同航速下的測量數(shù)據(jù)校對,進行RTK定位系統(tǒng)校正,另外做好相應的安全措施。測量實施時,無人船合理設(shè)置航線,應盡量保持勻速、直線航行,航向偏角變化不大于5°。當出現(xiàn)測深儀信號不正常、無法獲取水深時,應及時補測。水下地形出現(xiàn)突變時,無法查明原因的應重測。
3.5 數(shù)據(jù)的傳輸與處理
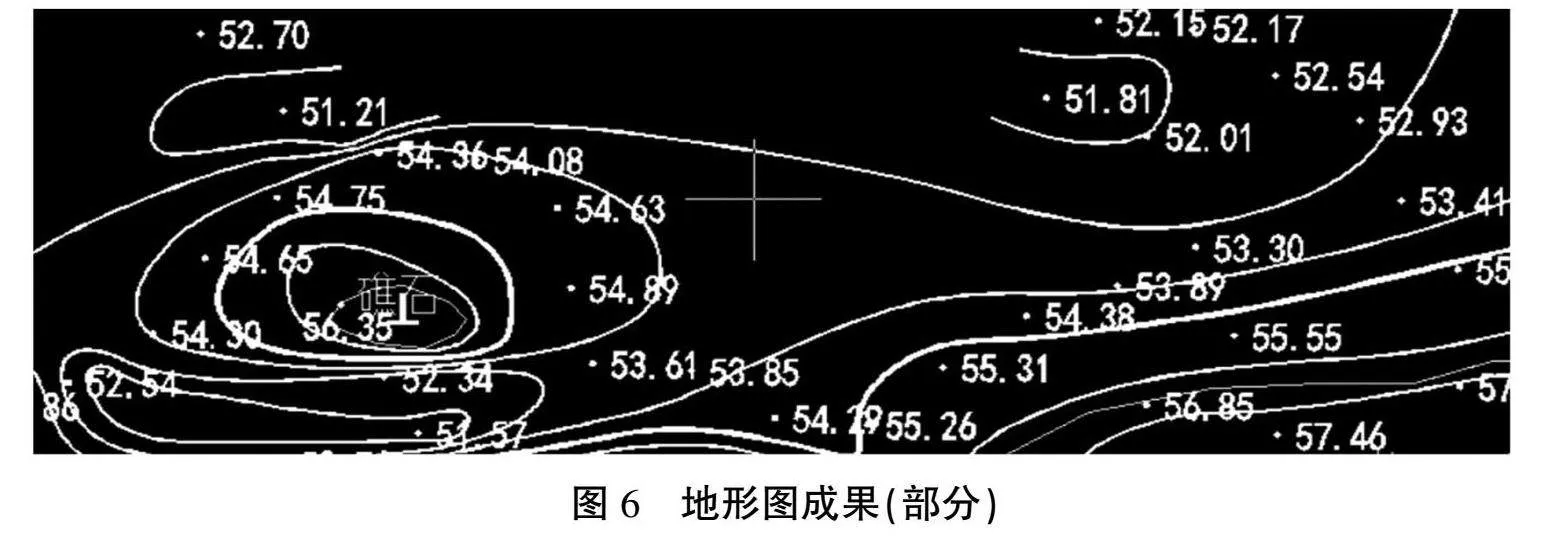
測量實施過程中留意數(shù)據(jù)的傳輸是否正常,數(shù)據(jù)是否有漏測或者異常,如有漏測或者異常需要安排補測。數(shù)據(jù)處理時需要剔除異常數(shù)據(jù),將RTK定位數(shù)據(jù)與測深儀所得數(shù)據(jù)聯(lián)合分析得到點的位置高程數(shù)據(jù),再利用專業(yè)軟件繪制成地形圖。數(shù)據(jù)處理采用華測HydroSurvey7導航軟件,軟件集成數(shù)據(jù)采集及后處理于一體,在確保數(shù)據(jù)完整的前提下剔除數(shù)據(jù)粗差,對水下測量點進行完整性和合格性檢查。通過軟件進行數(shù)據(jù)濾波與數(shù)據(jù)編輯。再利用CASS軟件導入數(shù)據(jù)繪制地形圖,部分成果如圖6所示。
3.6 智能無人船在水下地形測量數(shù)據(jù)精度評定
3.6.1 檢查線布設(shè)在河床較為平坦處與主測深線垂直,能普遍檢查主測深線
檢查線長度不少于主測深線總長的5%,且能滿足水深精度統(tǒng)計要求。測深檢測線與主測深線相交處,1 mm范圍內(nèi)水深點的深度比對互差應滿足表4所示的數(shù)據(jù)。
3.6.2 精度分析
本項目還將采用RTK定位方式抽取部分點來檢測水位,具體參照CH/T 2009—2010《全球定位系統(tǒng)實時動態(tài)測量(RTK)技術(shù)規(guī)范》中5.3 RTK高程控制測量要求執(zhí)行。在河道區(qū)域布設(shè)檢查測線采集水深數(shù)據(jù),選取與主測線臨近點位進行比較,共比對200個檢查點。
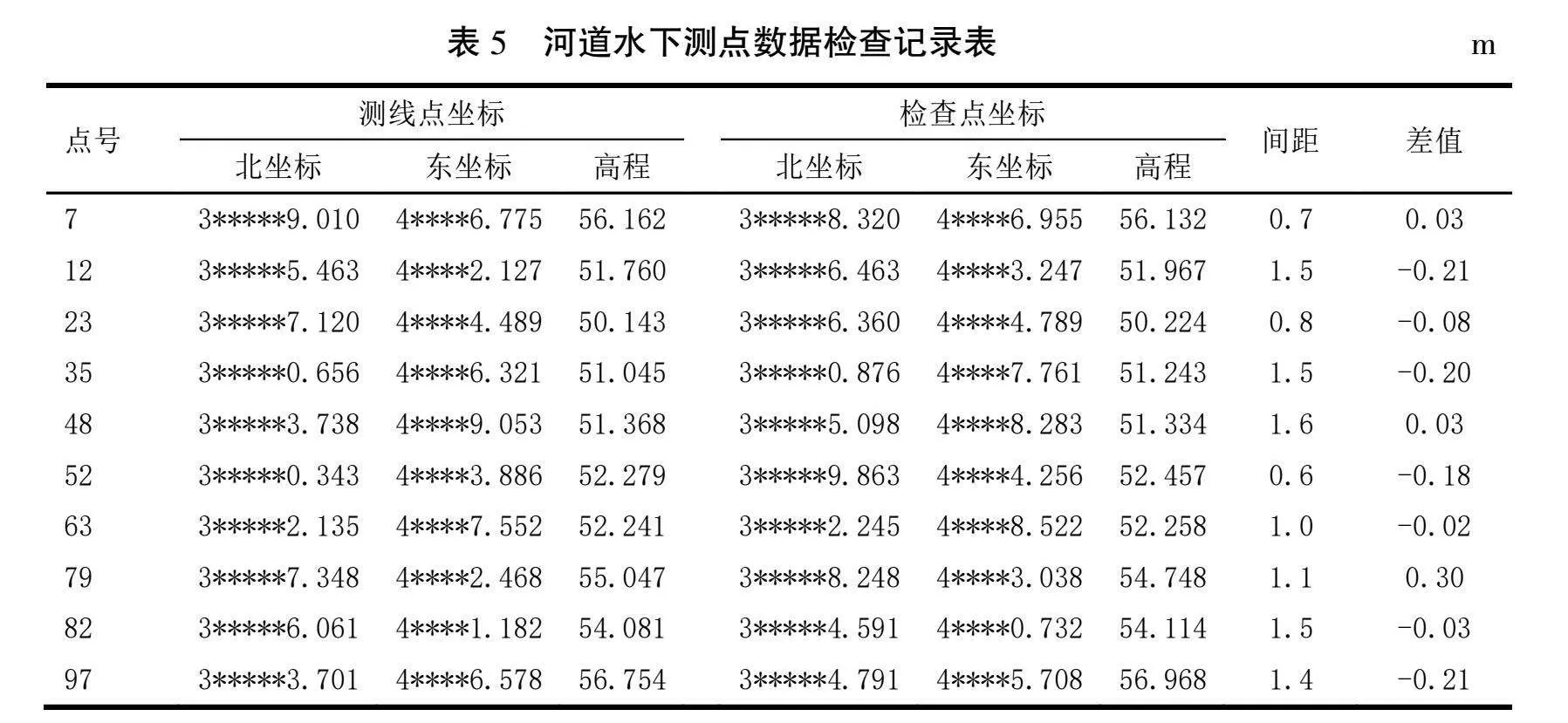
經(jīng)統(tǒng)計,測深數(shù)據(jù)與檢測數(shù)據(jù)比對互差小于0.1 m的有196個,超出深度互差限差0.3 m的有4個,檢測數(shù)據(jù)中誤差為0.06 m。統(tǒng)計結(jié)果表明測量數(shù)據(jù)滿足水深精度統(tǒng)計要求。其中部分檢查記錄見表5。
4 結(jié)束語
在本次水下地形測量項目中,采用智能無人船測量方式順利完成了作業(yè)任務,并通過數(shù)據(jù)結(jié)果檢驗分析驗證了數(shù)據(jù)的合格性,這充分說明智能無人船進行水下測量能滿足項目技術(shù)要求。在此次項目作業(yè)中,智能無人船體現(xiàn)出作業(yè)靈活便捷、高效安全、精度可靠和省時省力等諸多優(yōu)勢。因此,充分發(fā)揮智能無人船測量優(yōu)勢,能夠為水下測量項目的順利開展提供有利的技術(shù)保障。
參考文獻:
[1] 劉宸.無人船在水下地形測量中的應用分析[J].中國水運,2023(7):98-99.
[2] 李冠軍.無人船在水下地形測量中的應用與數(shù)據(jù)處理探討[J].吉林水利,2022(6):23-26.
[3] 文蘭.無人船水下測量技術(shù)的應用研究[D].南昌:南昌工程學院,2018.
[4] 孟海豹,石峰.GPS和測深儀組合技術(shù)在水下地形測量中的應用[J].工程技術(shù)研究,2020,5(3):37-38.
[5] 佟中石,音濤,馮孝.無人船測量——一種新型水下地形測量方法[J].測繪與空間地理信息,2022,45(6):305-307.
