配網帶電作業目標三維定位方法研究
2024-10-09 00:00:00高博肖志恒聶政
電子產品世界 2024年9期
關鍵詞:配網帶電作業;三維定位;多傳感器融合;目標識別與跟蹤
中圖分類號:TM84;TP311.13 文獻標識碼:A
0 引言
隨著電力行業的迅猛發展和智能電網建設的不斷深入,配網帶電作業作為保障電力供應穩定、提高電網運行效率的關鍵環節,其重要性日益凸顯。
然而,配網帶電作業通常面臨復雜的作業環境和嚴格的安全要求,如何在確保作業人員安全的前提下,實現作業目標的快速、準確定位,成為擺在研究人員面前的重要課題。在配網帶電作業中,作業目標的定位精度直接影響作業效率和安全性。傳統的定位方法往往依賴于人工判斷和經驗[1],這種方法不僅效率低,而且存在較大的安全隱患。因此,研究一種高效、準確的三維定位方法,對于提高配網帶電作業的安全性和效率具有重要意義[2]。
1 三維定位技術基礎
三維定位技術是通過測量目標物體在空間中的位置信息,從而確定其三維坐標的一種技術[3]。其核心原理是建立一個三維坐標系,利用測量設備獲取目標物體在該坐標系中的位置數據,進而通過數據處理和分析,得到目標物體的三維坐標。
在三維定位技術中,常用的坐標系包括笛卡爾坐標系、極坐標系和球坐標系等。根據具體應用場景和測量設備的不同,可以選擇合適的坐標系進行定位[4]。例如,在配網帶電作業中,可以采用基于地理坐標系的定位方法,將電力設備的位置信息與地理坐標相結合,實現精準定位。
2 配網帶電作業目標三維定位方法設計
在配網帶電作業中,實現對作業目標的精準三維定位是提高作業效率和安全性的關鍵。針對配網帶電作業的復雜環境和特殊需求,設計一種高效、準確的三維定位方法顯得尤為重要。
2.1 設計思路
配網帶電作業目標三維定位方法的設計應充分考慮作業環境的復雜性、作業目標的多樣性以及作業效率和安全性的要求。因此,在設計時,應遵循以下原則:①高精度。確保定位結果的準確性,以滿足配網帶電作業對精度的要求。②高效率。實現快速定位,減少作業時間,提高作業效率。③高可靠性。確保定位系統的穩定性和可靠性,降低故障率,保障作業安全。④易操作。簡化操作流程,降低對作業人員的技術要求,提高操作便利性。
2.2 關鍵技術研究
在配網帶電作業目標三維定位方法的設計中,涉及多個關鍵技術的研究和應用,這些技術的詳細介紹如下。
(1)傳感器融合技術:在配網帶電作業中,可以融合激光雷達、相機、慣性測量單元等多種傳感器的數據,以獲得更豐富的空間信息。
(2)目標識別與跟蹤技術:在復雜的作業環境中,采用深度學習對作業目標進行特征提取和分類識別,實現對目標的快速、準確識別,結合目標跟蹤算法,實現對目標運動的實時跟蹤。
(3)三維重建技術:在配網帶電作業中,采用基于結構光、立體視覺或激光掃描等技術的三維重建方法,可以通過對電力設備的三維重建,實現對設備狀態的實時監測和評估。
(4)多傳感器數據同步與校準技術:采用時間戳同步、空間坐標轉換等方法,實現各傳感器數據之間的精確對齊和融合。
2.3 實現流程
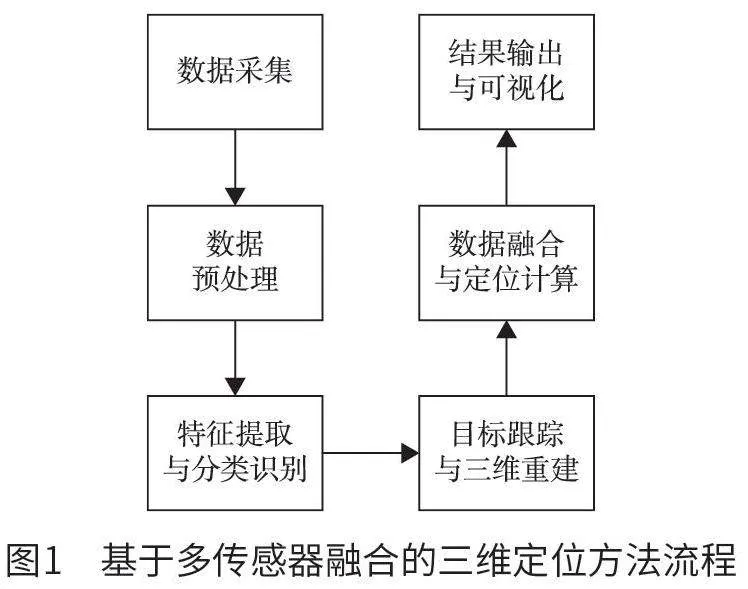
基于多傳感器融合的三維定位方法流程如圖1所示,具體步驟如下。
步驟1:數據采集。通過激光雷達、相機等傳感器設備,獲取作業環境的空間信息以及作業目標的位置信息。
步驟2:數據預處理。對采集到的原始數據進行濾波、去噪等預處理操作,以提高數據質量和可靠性。
步驟3:特征提取與分類識別。利用深度學習等技術,對預處理后的數據進行特征提取和分類識別,實現對作業目標的準確識別和分類。
步驟4:目標跟蹤與三維重建。結合目標跟蹤算法和三維重建技術,實現對作業目標的實時跟蹤和三維重建。
步驟5:數據融合與定位計算。將多傳感器數據進行融合,并根據融合后的數據進行定位計算,得到作業目標的精準三維坐標。
步驟6:結果輸出與可視化。將定位結果以圖形化或數值化的形式輸出,方便作業人員查看和分析。同時,可以通過虛擬現實等技術實現定位結果的可視化展示,提高作業效率和安全性。
3 實驗與驗證
在完成了配網帶電作業目標三維定位方法的設計之后,需進行實驗與驗證。通過實驗來評估所設計方法的實際性能,并對其進行優化和改進。針對配網帶電作業目標三維定位方法的實驗與驗證部分詳細闡述如下。
3.1 實驗環境搭建
搭建一個符合配網帶電作業實際場景的實驗環境。這個環境需模擬真實作業中的光照條件、電磁干擾、設備布局等因素,以確保實驗結果的可靠性和有效性。在搭建實驗環境時,使用仿真軟件或搭建實體模型來模擬真實的作業場景。
3.2 實驗設備準備
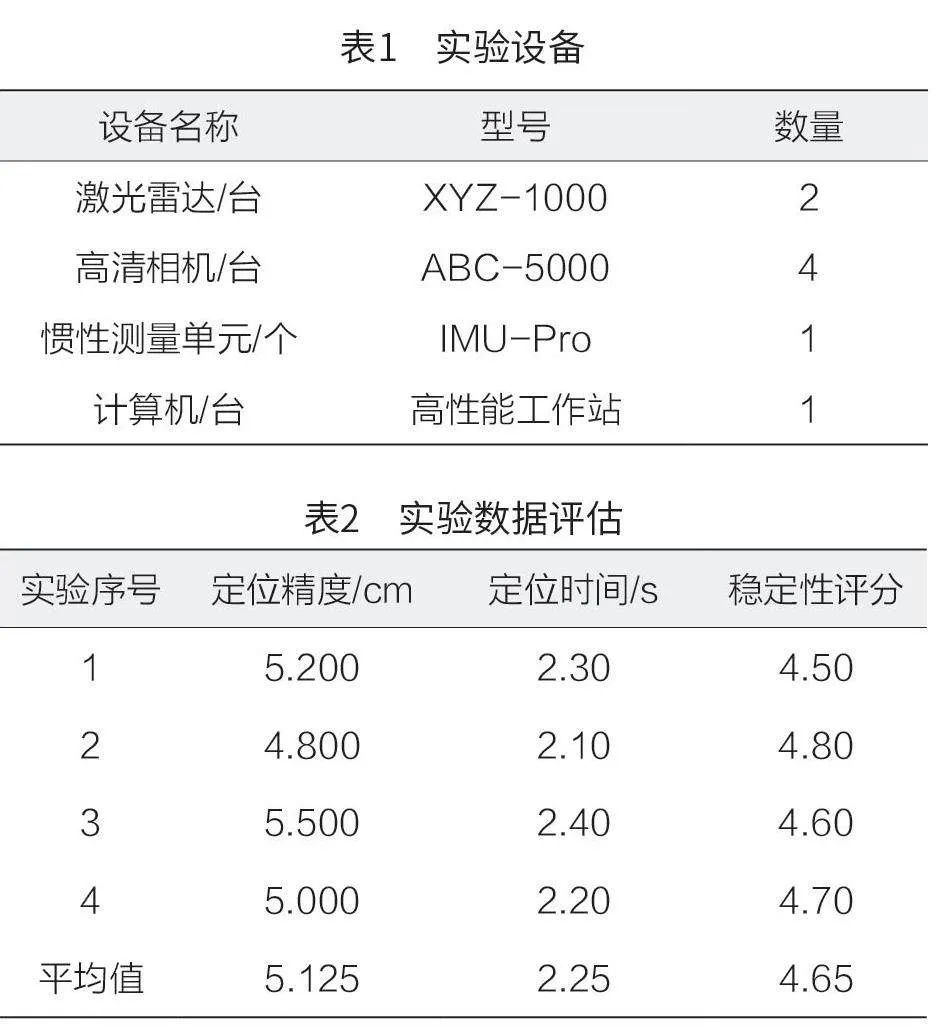
根據所設計的三維定位方法,準備相應的實驗設備(表1)。這些設備包括激光雷達、高清相機、慣性測量單元等傳感器設備,以及數據處理和分析所需的計算機和軟件。確保實驗設備的質量和性能滿足實驗要求,并進行必要的校準和測試。
3.3 實驗步驟設計
設計詳細的實驗步驟,以確保順利進行實驗和準確采集數據。實驗步驟如下。
步驟1:在實驗環境中布置傳感器設備,并進行必要的校準和調試。
步驟2:選擇或制作代表配網帶電作業目標的物體,并將其放置在實驗環境中。
步驟3:啟動實驗設備,開始數據采集過程,需確保在數據采集過程中保持環境穩定,避免外界干擾。
步驟4:對采集的數據進行預處理、特征提取、目標識別與跟蹤、三維重建等處理。
步驟5:根據處理后的數據進行定位計算,得到作業目標的精準三維坐標。
步驟6:將定位結果與真實值進行對比分析,評估定位方法的準確性和精度。
3.4 數據分析與結果評估
對實驗數據進行深入分析和處理,以評估配網帶電作業目標的性能,常用的評估指標包括:①定位精度。通過計算定位結果與真實值之間的誤差來評估定位精度。誤差越小,定位精度越高。②定位時間。評估定位方法所需的時間,以判斷其是否滿足配網帶電作業對實時性的要求。③穩定性。觀察在不同環境條件下定位方法的性能表現,以評估其穩定性和魯棒性。
通過實驗,驗證了所設計的基于多傳感器融合的三維定位方法在配網帶電作業中的有效性和實用性。如表2 所示,定位精度平均值為5.125 cm,滿足配網帶電作業對精度的要求。定位時間平均值為2.25 s,滿足配網帶電作業對實時性的要求。穩定性評分平均值為4.65(穩定性評分范圍為0~5),表明該方法在不同實驗條件下均表現出較好的穩定性和魯棒性。該方法具有較高的定位精度和實時性,能夠滿足配網帶電作業對目標定位的需求。
4 結論與展望
本文提出的基于多傳感器融合的三維定位方法,在配網帶電作業領域展現出顯著的實用價值。該方法不僅具備高度實時性,能夠確保在配網帶電作業過程中快速響應和準確判斷,而且定位精度高,為作業人員提供了精確的導航和定位支持。通過實驗驗證,該方法在不同環境和復雜作業條件下均能保持穩定的性能,具有較好的魯棒性。
隨著技術的不斷發展和應用場景的日益擴大,可以繼續深入研究并優化該方法,探索更多先進的傳感器技術和數據處理算法,以提高其性能并擴展其應用范圍。未來,三維定位技術將會為配網帶電作業提供更加高效、安全和智能的解決方案,推動該領域的技術進步和發展。