基于時空位置關注圖神經網絡的交通流預測方法
2024-10-14 00:00:00何婷周艷秋辛春花
計算機應用研究 2024年10期

摘 要:針對現有交通流預測方法存在難以構建空間和時間依賴關系的問題,提出了新的利用時空位置注意力的圖神經網絡(ST-PAGNN)方法。首先,該圖神經網絡中包含有位置關注機制,由此能夠更好地對城市道路網絡中交通節點的空間依賴關系進行有效捕捉;然后,利用帶有trend adaptive Transformer (Trendformer)的門控遞歸神經網絡來捕捉交通流序列在時間維度上的局部和全局信息;最后,利用改進的網格搜索優化方法對模型的引入參數進行優化,并以較高的時間效率獲得全局最優解。實驗結果表明,在數據集PEMS-BAY中,預測步長分別為15 min,30 min,60 min時,ST-PAGNN的評價指標RMSE、MAE和MAPE分別為1.37,2.57,2.67%,1.55,3.64,3.37%,1.97,4.37,4.43%;在數據集METR-LA中,預測步長分別為15 min,30 min,60 min時,ST-PAGNN的評價指標RMSE、MAE和MAPE分別為2.73,5.16,7.13%,2.99,5.97,7.86%,3.53,7.16,9.96%。結論表明,ST-PAGNN在不同粒度下的評價指標中均高于現有模型,從而說明了ST-PAGNN在解決交通預測問題方面的有效性和優越性。
關鍵詞:ST-PAGNN;交通流預測;深度學習;圖卷積神經網絡;門控循環單元;Trendformer
中圖分類號:TP391 文獻標志碼:A 文章編號:1001-3695(2024)10-008-2932-07
doi:10.19734/j.issn.1001-3695.2024.01.0026
Traffic flow prediction method based on spatial temporal positionattention graph neural network
He Ting, Zhou Yanqiu, Xin Chunhua
(Dept. of Computer Technology & Information Management, Inner Mongolia Agricultural University, Baotou Nei Mongol 010010, China)
Abstract:To address the challenge of constructing spatial and temporal dependencies in existing traffic flow prediction me-thods, this paper proposed a new method called spatial temporal position attention graph neural network (ST-PAGNN), which utilized spatiotemporal location attention. Firstly, the graph neural network contained a location attention mechanism, which could better capture the spatial dependence of traffic nodes in the urban road network. Then, it used a gated recurrent neural network with trend adaptive transformer (Trendformer) to capture the local and global information of the traffic flow sequence in the time dimension. Finally, it used the improved grid search optimization method to optimize the introduced para-meters of the model, obtaining the global optimal solution with high time efficiency. The experimental results show that in the dataset PEMS-BAY, the evaluation indexes RMSE, MAE and MAPE of the ST-PAGNN method are 1.37, 2.57, 2.67%, 1.55, 3.64, 3.37%, 1.97, 4.37 and 4.43%, respectively, when the prediction step size is 15 min, 30 min and 60 min, respectively. In the dataset METR-LA, when the prediction step size is 15 min, 30 min and 60 min, the evaluation indexes RMSE, MAE and MAPE of the ST-PAGNN method are 2.73, 5.16, 7.13%, 2.99, 5.97, 7.86%, 3.53, 7.16 and 9.96%, respectively. The results show that the proposed ST-PAGNN method is higher than the existing models in the evaluation indexes under different granularities, which illustrates the effectiveness and superiority of ST-PAGNN in solving traffic prediction problems.
Key words:ST-PAGNN; traffic flow forecasting; deep learning; GCN; GRU; Trendformer
0 引言
隨著城市化進程的加速和人口的不斷增長,交通擁堵問題在人們的日常生活中也越來越嚴重[1]。準確地預測未來短期內的交通流是解決交通擁堵問題的關鍵。最近幾年,交通流預測領域開始普遍應用大數據以及深度學習技術,在此影響下獲得了更加有效的問題解決方案[2]。
大數據技術已經成為現代社會不可或缺的組成部分[3]。在交通領域,大數據來源于各類傳感器、移動設備、交通監控系統以及社交媒體等多種渠道,提供了大量的交通信息。這些數據的分析和挖掘,通過準確地捕捉交通流的特征和模式,可以為短時交通流預測提供有力支持[4]。作為機器學習技術領域的最新研究和應用成果,深度學習由于自身所具有的模式識別能力非常強,特征學習能力也比較突出等特點,所以能夠被深入應用到交通流預測當中。
目前,對于短期交通流預測的研究主要分為經典統計方法、機器學習方法和深度學習方法三類[5]。經典統計方法模型較為簡單,因此計算方便,速度較快,但是這些方法對于平穩數據的預測效果較好,對于非線性和復雜的交通流數據表現較差。基于機器學習的方法利用了回歸和分類算法進行建模和預測,能夠實現較好的預測效果,但在大量數據和特征維度較高的情況下,仍然存在性能瓶頸。隨著深度學習技術的興起,基于深度學習的方法在交通流預測領域取得了顯著的突破,其強大的非線性建模能力使得預測準確性大幅提高[6]。
為了彌補機器學習相關方法的不足,現存的深度學習方法,大多是通過設計和完善神經網絡來捕捉交通流信息的時間和空間依賴性。例如,循環卷積神經網絡 RNN 通過二維時空矩陣將時空交通狀態轉換為描述交通流時空關系的圖像,增強了時空的關聯性。RNN的變體[7]長短期記憶網絡LSTM解決了RNN梯度消失的問題,提高了時空依賴性。Fu等人[8]提出將門控循環單元(GRU)遞歸神經網絡(NN)結合LSTM方法來捕獲時空依賴性模型表現良好。以上方法通常適用于規則的歐幾里德結構的數據[9],例如圖像、網格等。但是用于收集交通流信息的檢測器的分布屬于非歐幾里德結構,因此這些方法在交通流預測的準確性上存在局限性。為此,Liu等人[10]提出基于圖卷積網絡(GCN)的模型用來提取交通流的領域信息和社區信息,加快了圖卷積神經網絡的發展。在圖卷積神經網絡中,層次交叉的交通路線被建模成圖結構,圖中交通連接的地方稱為圖結構中的節點,邊權值叫做節點歐氏距離。為了捕獲交通數據的時間和空間的依賴性,時間圖卷積網絡(T-GCN)、圖卷積網絡和門控循環單元相結合[11~13],用圖卷積學習拓撲結構以捕捉空間依賴性,同時用門控遞歸單元學習交通數據變化以捕獲數據的時間依賴性。相較于之前沒有采用GCN的方法,這些方法雖然在模型的預測精度上有了一定的提升,但是仍然存在一些問題:a)采用的是定義好的不變的圖結構[14],不能動態地反映出節點之間的影響關系;b)無法很好地捕捉交通情況,以上方法使用共享模型參數,而對于特征的交通數據情況,無法捕捉到細粒度的特征表示,例如交通路段封閉;c)不能同時有效地捕捉交通流數據的時空依賴性,從而導致其在預測準確率上面存在局限性[15]。
由于現存方法不能有效解決空間和時間方面依賴關系,針對上述問題,本文設計了一個融合空間-時間依賴和位置注意力圖神經網絡的交通流預測方法(spatial temporal position attention graph neural network, ST-PAGNN)。
本文的主要貢獻如下:
a)為了捕捉道路之間的空間關系,引入添加位置注意力機制的圖神經網絡模型,從而更加有效地聚集來自相鄰道路的交通流信息。
b)利用改進的網格搜索優化方法對模型的引入參數進行優化,并以較高的時間效率獲得全局最優解,可以保證整合后模型的普適性。
c)通過GCN學習拓撲來捕獲空間依賴性,將LSTM[15]網絡嵌入到GCN增加網絡時間記憶功能來捕獲時間特征,增強長序列處理的能力。
d)通過結合GRU和Trendformer來捕捉局部和全局的時間依賴性,獲取交通流的動態趨勢,增強模型對特殊事件發生的魯棒性。
e)提出了新的ST-PAGNN框架進行交通流的預測,特別用于對具有復雜拓撲和時間依賴性的系列數據進行建模。在真實的數據集上驗證了ST-PAGNN的可行性和優勢,特別是對于以分鐘為單位的短時交通速度預測。實驗表明,提出的模型明顯優于其他幾種先進的方法。
1 相關工作
在交通流預測領域,基于傳統機器學習和深度學習的方法已經取得了一定的研究成果[16]。基于短時交通流預測問題的深入研究和分析需要,本文在對交通流預測方法進行闡釋時,主要基于傳統機器學習和深度學習兩個維度進行。
1.1 基于傳統的機器學習的交通流預測方法
基于傳統的機器學習方法通常依賴于手動選取的特征提取,通過構建和訓練機器學習模型來預測交通流量[17]。這些方法主要基于統計模型、回歸模型和決策樹等,它們在交通流量預測中具有一定的可靠性和可解釋性。
常見的基于傳統的機器學習的方法包括:回歸模型如線性回歸和非線性回歸;決策樹算法如CART、隨機森林和支持向量機(SVM)等。Toan等人[18]提出了一種使用支持向量機進行短期交通流預測的有效方法,與基線方法(包括歷史平均值、基于當前時間和雙指數平滑預測因子)進行比較。為了證明 SVM 的效率和準確性,在新加坡泛島高速公路的一段路上使用了一個月的時間序列交通流量數據來訓練和測試模型。結果表明,在大多數預測區間和各種交通條件下,在30 min的滾動水平線上,SVM的性能顯著優于基線方法。Miao等人[19]提出了一種多任務貝葉斯增強的對抗時空網絡MBA-STNet來學習特定任務的特征和共享特征。結果表明,MBA-STNet優于目前先進的方法。這些方法能夠利用歷史交通數據和其他影響因素,構建模型來預測交通流量。Peng等人[20]提出了ARIMA-SVM組合預測模型用于預測城市短期交通流量。首先,利用ARIMA和SVM預測城市短期交通流量;然后,利用更新的動態權重加權融合方法預測城市交通流量,得到ARIMA-SVM組合預測模型,并將結果與單獨的ARIMA和SVM進行比較。實證結果表明,ARIMA-SVM組合模型能夠更準確地預測城市的短期交通流量。然而,這類方法對于特征提取的依賴性較強,需要人工選取合適的特征,并且在處理非線性和高維數據方面的能力有限。
1.2 基于深度學習的交通流預測方法
最近幾年,研究領域開始越來越關注基于深度學習的交通流預測方法。深度學習方法通過構建多層神經網絡,可以自動學習交通流的特征和模式,并將其應用于交通流量的預測。相對于傳統的機器學習方法,深度學習具有更強的非線性建模和特征學習能力[21]。
在日常的研究中,循環神經網絡(RNN)是應用最為普遍的基于深度學習的方法,但是除此之外,由此衍生出來的門控循環單元網絡以及卷積神經網絡(CNN)等也比較常見。文獻[22]提出了一種名為M-B-LSTM的混合深度學習網絡模型來對短期交通流進行預測。該模型包括數據映射層、統計分布和深度雙向長短期記憶網絡(DBLSTM)。通過這些組件,M-B-LSTM能夠有效地處理交通流數據存在的分布不平衡、過擬合和不確定性問題,從而準確預測未來一段時間內的交通流狀態。此外,經過充分的對比實驗,結果表明,與現有方法相比,所提模型在解決不確定性和過擬合問題方面具有更好的能力。Zheng等人[23]提出了一種基于深度學習的模型,該模型使用混合和多層架構來自動提取交通流數據的固有特征。首先,為了對空間和短期時間特征進行有效的提取,最好的方法就是進行基于注意力的Conv-LSTM模塊的開發,而這又必須要建立在卷積神經網絡和長短期記憶(LSTM)網絡基礎之上;科學合理制定注意力機制,在自動對各個權重進行有效分配的基礎之上,能夠有效對各個時間流序列的不同重要程度進行界定。其次,基于對長期時間特征進行深入研究的需要,構建了全新的雙向LSTM(Bi-LSTM)模塊,據此來對每日和每周的周期性特征進行提取,由此能夠更好地對交通流從前向和后向的發展變化情況進行捕捉。最后,通過大量的實驗結果表明,與其他現有方法相比,所提結合注意力轉換和Bi-LSTM的模型具有更好的預測性能。Han等人[24]提出了一個名為LST-GCN的模型。利用LSTM(長短期記憶)網絡優化GCN(圖卷積網絡)參數來模擬交通流預測中存在的時空相關性。具體來說,本文通過GCN學習拓撲來捕獲空間相關性,通過將LSTM網絡嵌入GCN的訓練過程中來捕獲時間相關性。該方法改進了原有時空交通流預測中循環神經網絡和圖神經網絡相結合的傳統方法,能夠更好地捕捉交通流中存在的時空特征。在PEMS數據集上進行的大量實驗證明了與其他最新方法相比,該方法更有效。 Liu等人[25]提出一種基于GCN和LSTM網絡的深度學習網絡。該模型是使用綿陽市的本地交通數據進行訓練和測試的。在引入新的深度學習網絡后,本文還建立了一種基于時間相關性選擇相關道路鏈接作為模型輸入的數據縮減方法。最后,將所提算法與其他常用方法進行對比,在常規的5 min預測測試中可以獲得更好的結果。同時,GCN-LSTM模型的性能可以通過多步預測,在5~125 min的不同時間內保持,比其他模型要好得多。這些方法能夠通過多層次的網絡結構,捕捉交通流的時序特征和空間關系,提高交通流量預測的準確性。深度學習方法還可以通過端到端的訓練過程,自動進行特征學習和模型優化,減少對人工特征工程的依賴。
基于上述分析可知,盡管現有的交通流預測方法取得了優異的表現,但是當前利用注意力機制捕獲動態空間依賴的模型只使用了車速信息,忽視了其他的一些信息,也沒有利用全局的時間依賴。并且大多數的研究工作在空間和時間依賴性的建模上有一定的局限性,難以充分挖掘潛藏在復雜交通網絡中的內在模式,難以實現精準的交通流預測。因此,提出了基于ST-PAGNN的交通流預測方法。
2 基于ST-PAGNN的交通流預測方法
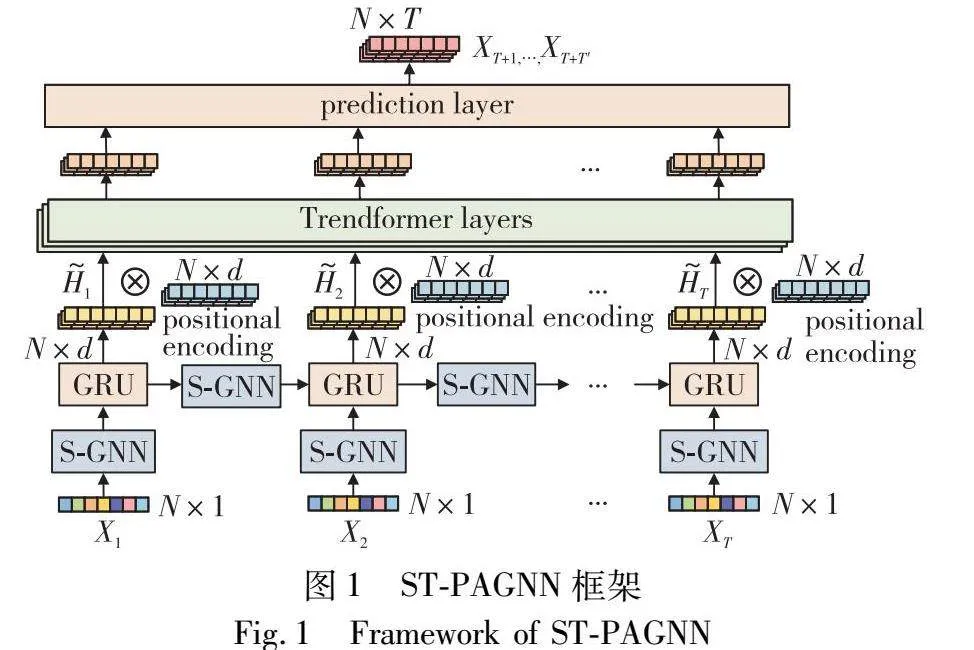
時空圖神經網絡框架如圖1所示,由三個主要部分組成:a)空間圖神經網絡(S-GNN)層,用于捕捉道路之間的空間關系;b)GRU層,用于捕捉序列中的時間關系(或局部時間依賴性);c)改進的Transformer層,用于直接捕捉序列中的長程時間依賴性(或全局時間依賴性)。需要注意的是,S-GNN層用于模擬節點之間的空間關系,并且同時應用于GRU單元的輸入和隱藏表示,如圖1所示。GRU層[26]和改進的Transformer層[27]都用于獨立地捕捉每個節點的時間相關性,分別從不同的角度進行捕捉。接下來,首先討論利用S-GNN來建模空間依賴性,然后介紹如何利用GRU層和Transformer層來捕捉時間依賴性。在介紹完這些組件之后,將對整個框架進行簡要總結。
2.1 空間依賴性建模
交通網絡G對道路之間的關系進行了編碼。交通網絡中的道路如果彼此之間連接在一起,那么其存在相似屬性的幾率也就越大。如果屬于間距較近的兩條路,那么其中任意一條路上出現的交通狀況都可能會影響到對方。所以,有必要借助于圖神經網絡模型(graph neural networks model)[28]來對其空間進行捕捉,通過網絡轉換和傳播信息。給定網絡上Xin∈Euclid ExtraaBpN×din的輸入信息,可生成輸出Xout∈Euclid ExtraaBpN×dout如下:
Xout=σ(D-1/2AD-1/2XinW)(1)
其中:σ為非線性激活函數,采用ReLU(·);A=A+IN是細化鄰接矩陣;IN是N維標識矩陣;D是細化度矩陣Dii=∑jAij;W是要學習的參數。式(1)中的運算總結如下:
Xout=fg(A,Xin)(2)
上述都是以網絡信息為載體的工作,而處于道路上傳感器間的地理臨近性又是形成網絡信息的基本前提。但是,道路間實際上可能會存在更為復雜的影響。比如,車輛密度、道路狀況等因素也都可能會對交通流量產生重大影響。所以,式(1)在具體進行聚合的過程當中,要避免在某個中心點對相近節點的信息進行平均聚合。本文嘗試采用全新的位置表示來對各個節點的這些因素進行捕捉。如果用vi來表示各節點,那么對應地采用pi來表示該點對周圍點的信息進行聚合之后的結果,任意兩個節點之間的相互作用關系計算如式(3)所示。
R[i, j]=exp(Φ(score(pi,pj)))∑Nk=1exp(Φ(score(pi,pk)))(3)
其中:Φ表示非線性映射函數,用來對節點間的得分進行變換;score()是一個用點積建模的關系得分函數。
score(pi,pj)=pTipj(4)
除此之外,借助于掩碼來稀疏化處理關系矩陣R,從而使計算變得更加簡便:
mask(R)=Rij if Aij > 0
0 otherwise(5)
然后,就可以對新學習的關系矩陣mask(R)進行GCN運算:
Xout=σ(D-1/2RRD-1/2RXinW(l))(6)
其中:R=mask(R)+IN;DR是R的度矩陣。式(7)為式(6)的簡寫,以捕捉空間關系:
Xout=fa(A,Xin)(7)
2.2 時間依賴性建模
基于對時間依賴性進行捕捉的需要,本文在對序列信息進行處理時借助了門控遞歸單元[26]。各個時間步分別有對應的一個隱藏表示被保留,以便對下個時間步的信息流進行控制,同時當前時間步也是以此作為輸出。在所有的節點上都獨立應用了GRU運算,但是彼此之間能夠共享GRU參數。為了在對序列進行處理時能夠將空間關系納入其中,借助于式(7)中修改后的GCN來對GRU的輸入和隱藏表示進行運算。具體而言,將Xt和上一步的隱藏表示Ht-1輸入到t也就是時間步驟當中,將修正的GCN運算應用其中:
Xt=fa(A,Xt)Ht-1=fa(A,Ht-1)
(8)
那么,對于時間步長為t的每個節點 vi,GRU 的運行情況 可以表示如下:
zt=σz(WzXt[i,:]+UzHt-1[i,:]+bz)
rt=σr(WrXt[i,:]+UrHt-1[i,:]+br)
Ht[i,:]=tanh(WhXt[i,:]+Uh(rt⊙UhHt-1[i,:])+bh)
Ht[i,:]=(1-zt)Ht-1[i,:]+zt⊙Ht[i,:]
(9)
其中:元素相乘用⊙表示;Wz和Uz代表更新門的權重矩陣;Wr和Ur代表重置門的權重矩陣;Wh,Uh代表候選隱藏狀態的權重矩陣;Ht[i,:]具有雙重角色,為及時輸出結果,同時也作為輸入存在于下一時間步中。
GRU的主要作用在于對局部時間信息進行捕捉。但是,在現實當中,時間信息除了具有順序相關之外還存在其他相關性。所以,在預測交通速度過程當中必須要做好對全局時間信息的捕捉。因此,在GRU層之后,采用了Trendformer來直接捕捉全局相關性。對于節點vi,將GRU的輸出序列(H1[i,:],…,HT[i,:])作為轉換器的輸入。
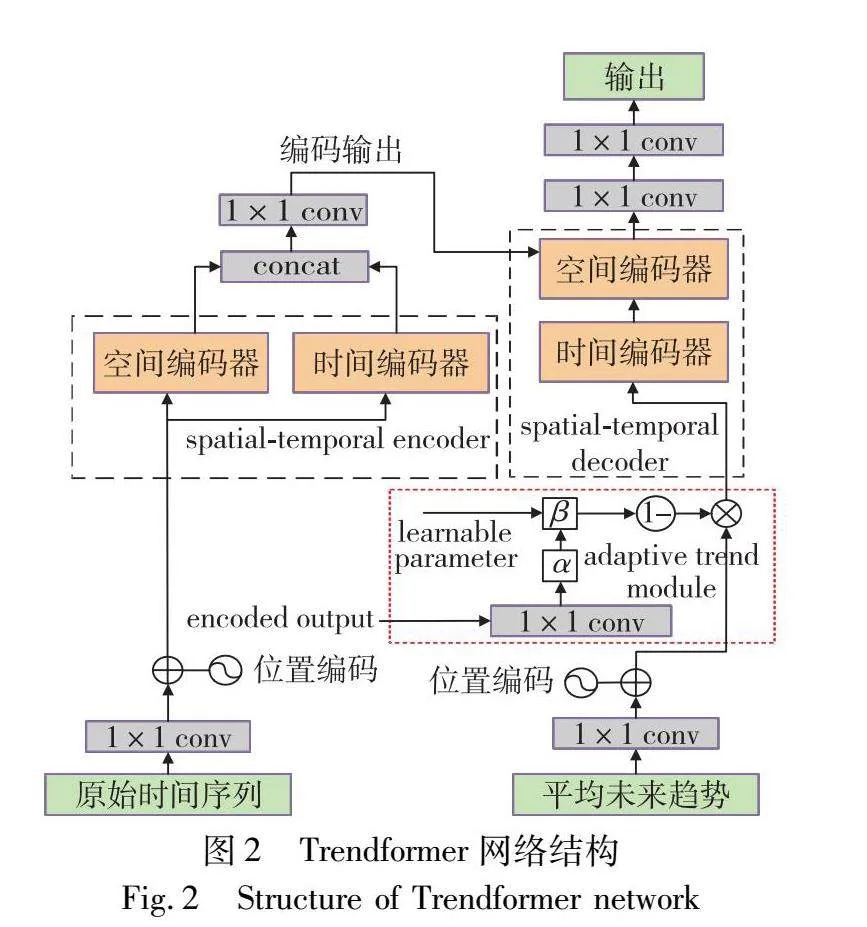
Trendformer由一個自適應趨勢模塊、一個時空編碼器、一個時空解碼器和一個輸出模塊組成。時空編碼器的主要構成部分為時間編碼器和空間編碼器,且兩者并行存在。對于后者而言,又可以細分為串行存在的時間編碼器和空間編碼器。時間編碼器和時間解碼器對序列進行多頭關注,以提取時間相關性。空間編碼器和空間解碼器對傳感器圖進行多頭關注,以提取空間相關性。將時間編碼器和空間編碼器的輸出進行融合,以獲得編碼輸出。自適應趨勢模塊根據編碼輸出確定可向解碼器傳輸多少趨勢信息,并控制預測輸出在趨勢周圍的波動強度。然后,編碼器和自適應趨勢模塊的輸出被送入時空解碼器。時空解碼器之后是一個輸出模塊,用于產生多步預測輸出,并最終輸出Hviout∈Euclid ExtraaBpT×d。Trendformer的網絡結構如圖2所示。
2.3 預測層
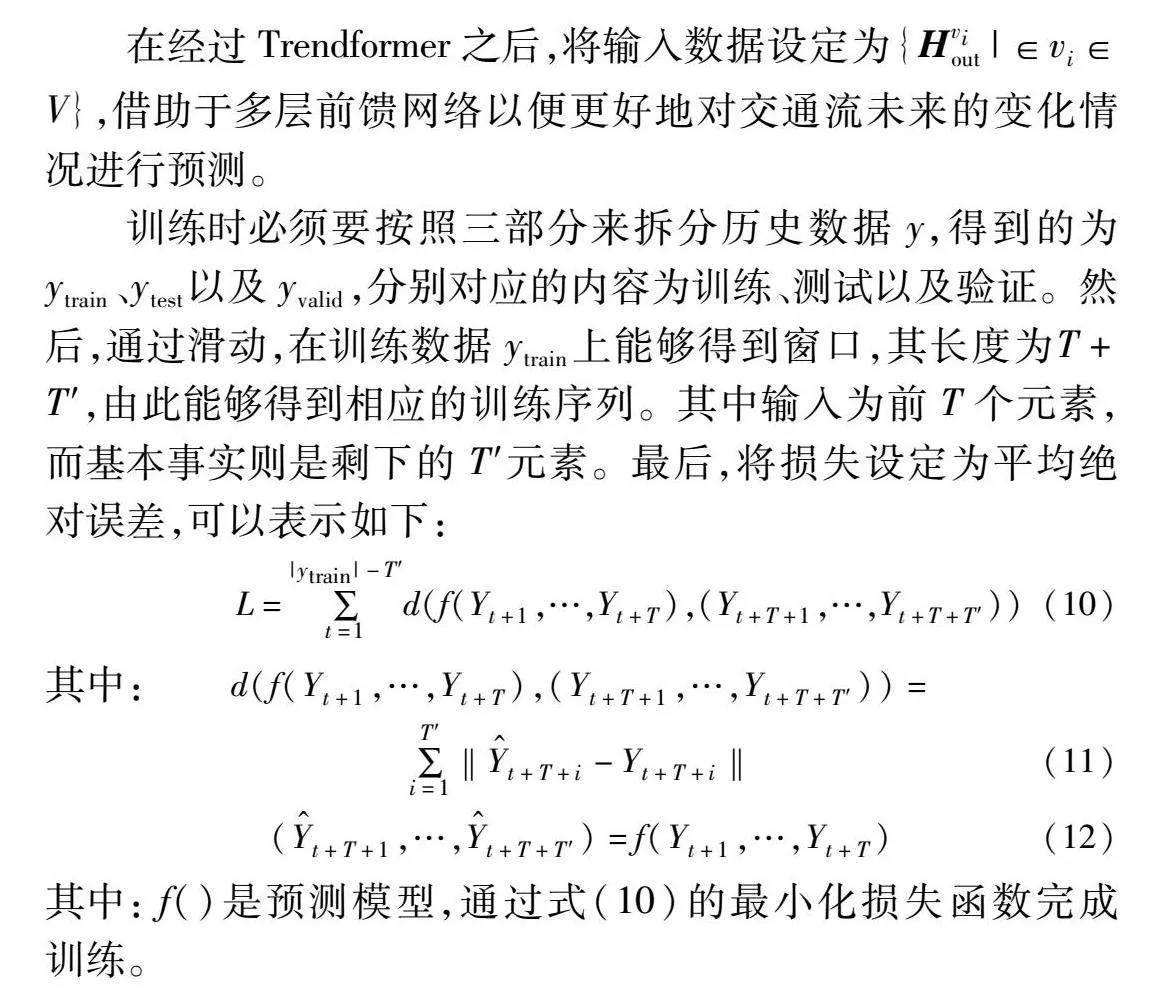
在經過Trendformer之后,將輸入數據設定為{Hviout|∈vi∈V},借助于多層前饋網絡以便更好地對交通流未來的變化情況進行預測。
訓練時必須要按照三部分來拆分歷史數據y,得到的為ytrain、ytest以及yvalid,分別對應的內容為訓練、測試以及驗證。然后,通過滑動,在訓練數據ytrain上能夠得到窗口,其長度為T+T′,由此能夠得到相應的訓練序列。其中輸入為前T個元素,而基本事實則是剩下的T′元素。最后,將損失設定為平均絕對誤差,可以表示如下:
L=∑|ytrain|-T′t=1d(f(Yt+1,…,Yt+T),(Yt+T+1,…,Yt+T+T′))(10)
其中:
d(f(Yt+1,…,Yt+T),(Yt+T+1,…,Yt+T+T′))=
∑T′i=1‖Y^t+T+i-Yt+T+i‖(11)
(Y^t+T+1,…,Y^t+T+T′)=f(Yt+1,…,Yt+T)(12)
其中: f()是預測模型,通過式(10)的最小化損失函數完成訓練。
2.4 參數優化策略
參數的選擇對模型的性能起著至關重要的作用。所提模型利用C和Gamma的獨立特性,通過分布式資源并行執行網格搜索來縮短模型搜索時間。
a)對數據集進行數據清理和歸一化。根據時間延遲t和嵌入維度m重構相空間后,作為模型訓練和測試輸入。
b)初始化模型參數,并將訓練集分為兩部分,第一部分訓練集用于GRU訓練數據,第二部分子集用于預測。
c)將第二部分子集的預測值和實際值拼接后作為元學習器的訓練數據。
d)初始化Trendformer的C和Gamma參數范圍和步驟,通過多線程網格搜索找到最優模型,并在交叉驗證后返回最優參數組合。
e)根據最優參數重建集成模型,并調用該模型對測試數據進行預測。
3 實驗
3.1 實驗環境和數據集
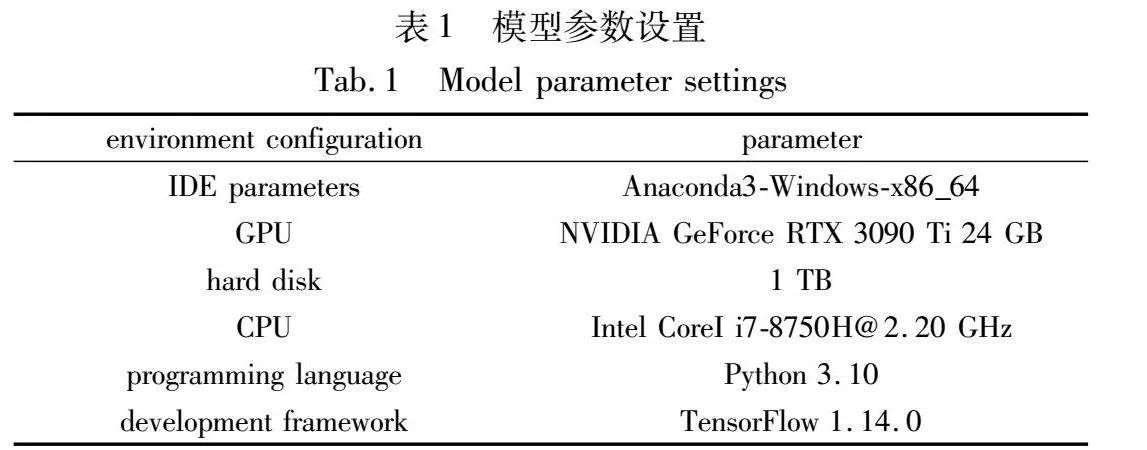
實驗環境配置參數如表1所示。每個模型的實驗結果均為十次實驗結果的平均值。
實驗中采用前12個節點進行預測,分別預測未來15 min、30 min、60 min的交通流速[29]。在本次實驗中,將模型訓練的迭代次數(epoch)設置為100,批量大小(batch size)設置為64,同時優化器(optimizer)選擇了AdamW,損失函數(loss function)使用的是MAE指標。實驗中的學習率為動態學習率[30],如式(1)所示。
newepochlr=startlr×[epochstepsize](13)
其中:newepochlr代表對應迭代次數的學習率;startlr代表模型訓練時的初始學習率;為每次更新學習率的乘法因子;[]為向下取整運算;stepsize為更新學習率的步長。初始學習率startlr設置為0.001,乘法因子設置為0.999,更新步長stepsize設置為10。這里的初始學習率startlr、乘法因子以及更新步長stepsize均是根據文獻[30]來進行設置的,同時也通過采用控制變量法進行對比實驗,驗證了這些參數的設置能夠使得模型取得最好的結果。此外,這些參數被設置后,再次通過使用控制變量法進行實驗,然后選取對比實驗中結果最佳狀態下的批量大小。
在兩個真實世界的流量數據集上進行了實驗,簡要介紹如下:
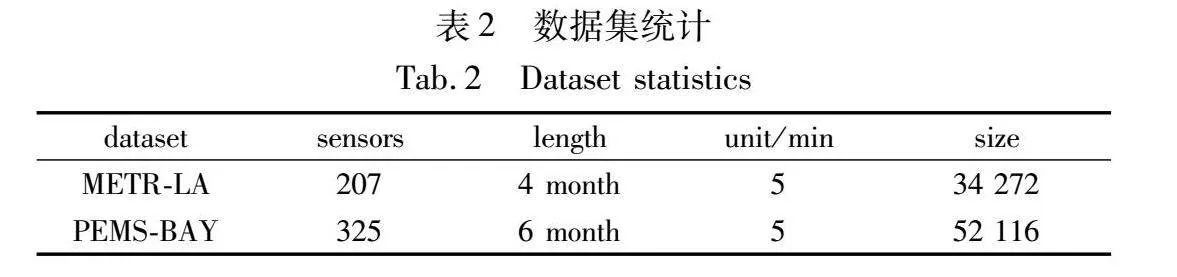
a)METR-LA。該數據為從洛杉磯縣的高速公路上的檢測器上收集的交通速度[31]數據。每5 min記錄一次每個節點的交通速度,本文使用的數據的時間跨度為2020年3月1日至2020年6月30日,時間為4個月。時間片總數為34 272個。
b)PEMS-BAY。該數據集來自加州交通部(Caltrans)的性能測量系統(PeMS)[32]。本文使用的數據來自灣區的325個傳感器,時間跨度為2020年1月1日至2020年5月31日,為期6個月。同樣該數據每5 min被記錄一次,包含了52 116個時間切片。表2展示了兩個數據集的關鍵信息。
3.2 評估指標
為了能夠確保最終的實驗結果更加具有客觀性,在選取性能指標上主要包括平均絕對誤差(mean absolute error, MAE)、平均絕對誤差百分比(mean absolute percentage error,MAPE)和均方根誤差(root mean square error,RMSE)三部分。
評價指標計算公式如式(14)~(16)所示。
MAE=1n∑ni=1|yi-i|(14)
RMSE=1n∑ni=1(yi-i)2(15)
MAPE=1n∑ni=1yi-iyi×100%(16)
其中:yi代表實際的客流量數據;i代表預測的客流量數據;n為樣本數量。上述評估指標的值越小,說明模型得到的交通流預測效果越好。
3.3 模型性能比較
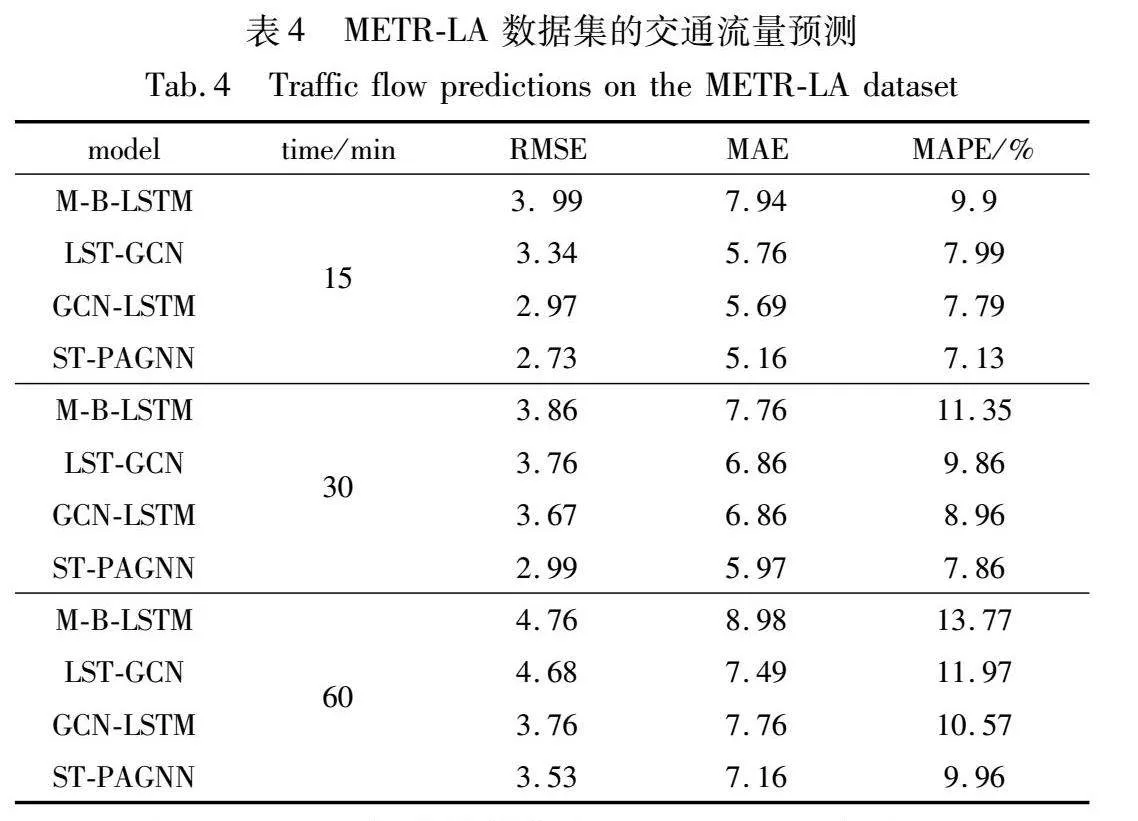
為了驗證該模型的優越性,設計了一組比較實驗。其中,比較模型包括M-B-LSTM[22]、LST-GCN[24]和GCN-LSTM[25]。
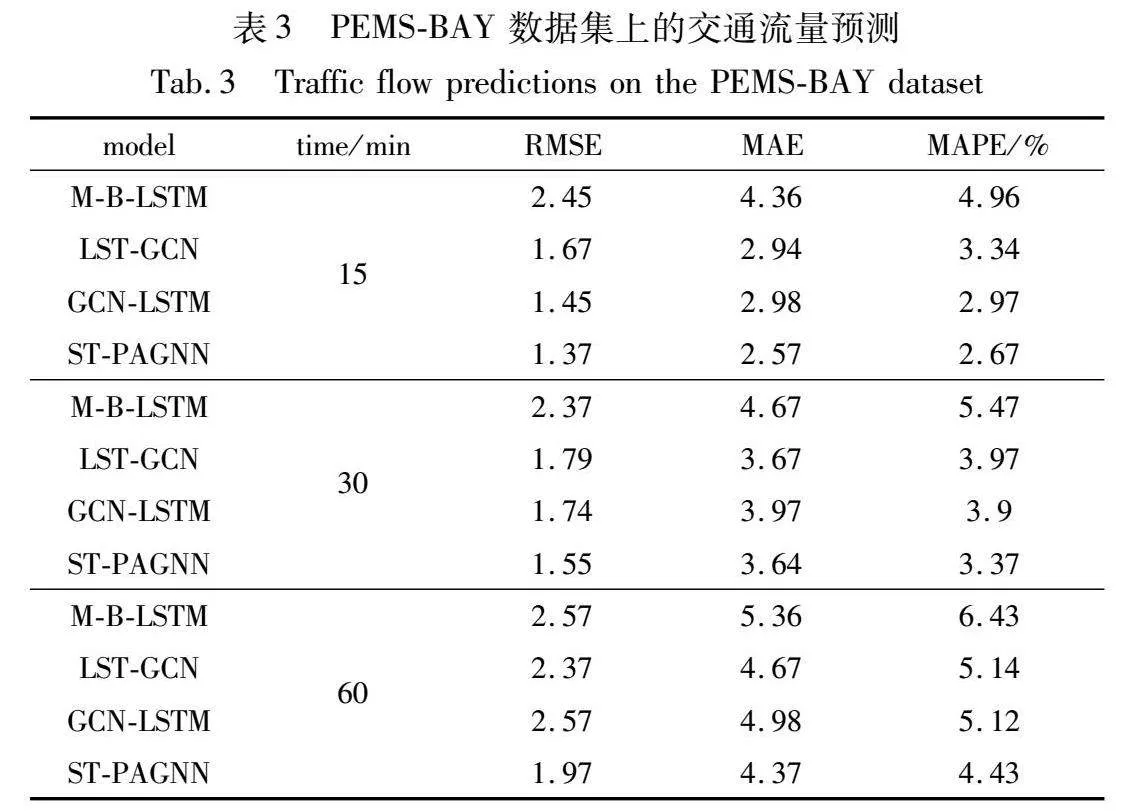
表3、4分別顯示了在數據集PEMS-BAY和METR-LA下的預測結果。本文對提前15 min、30 min和60 min的預測結果進行了平均,并突出顯示了每種設置下的最佳結果。
由表3、4可知,實驗數據集為PEMS-BAY時,在15 min預測步長下,基線模型中表現最好的是GCN-LSTM,相較于該模型,ST-PAGNN在RMSE、MAE和MAPE指標分別降低了0.08、0.41和0.3百分點;在30 min預測步長下,基線模型中整體上表現較好的是GCN-LSTM,相較于該模型,ST-PAGNN在RMSE、MAE和MAPE指標分別降低了0.19、0.33和0.53百分點;在60 min預測步長下,基線模型中整體上表現較好的是LST-GCN,相較于該模型,ST-PAGNN在RMSE、MAE和MAPE指標分別降低了0.40、0.30和0.71百分點。實驗數據集為METR-LA時,在15 min、30 min以及60 min預測步長時,基線模型中GCN-LSTM均表現較好。在15 min預測步長下,相較于GCN-LSTM,ST-PAGNN在RMSE、MAE和MAPE指標分別降低了0.24、0.53和0.66百分點;在30 min預測步長下,相較于GCN-LSTM,ST-PAGNN在RMSE、MAE和MAPE指標分別降低了0.68、0.89和1.10百分點;在60 min預測步長下,相較于GCN-LSTM,ST-PAGNN在RMSE、MAE和MAPE指標分別降低了0.23、0.60和0.61百分點。實驗結果表明,ST-PAGNN在所有情況下均表現良好,展現出模型良好的表現能力。
3.4 交通流預測的性能分析
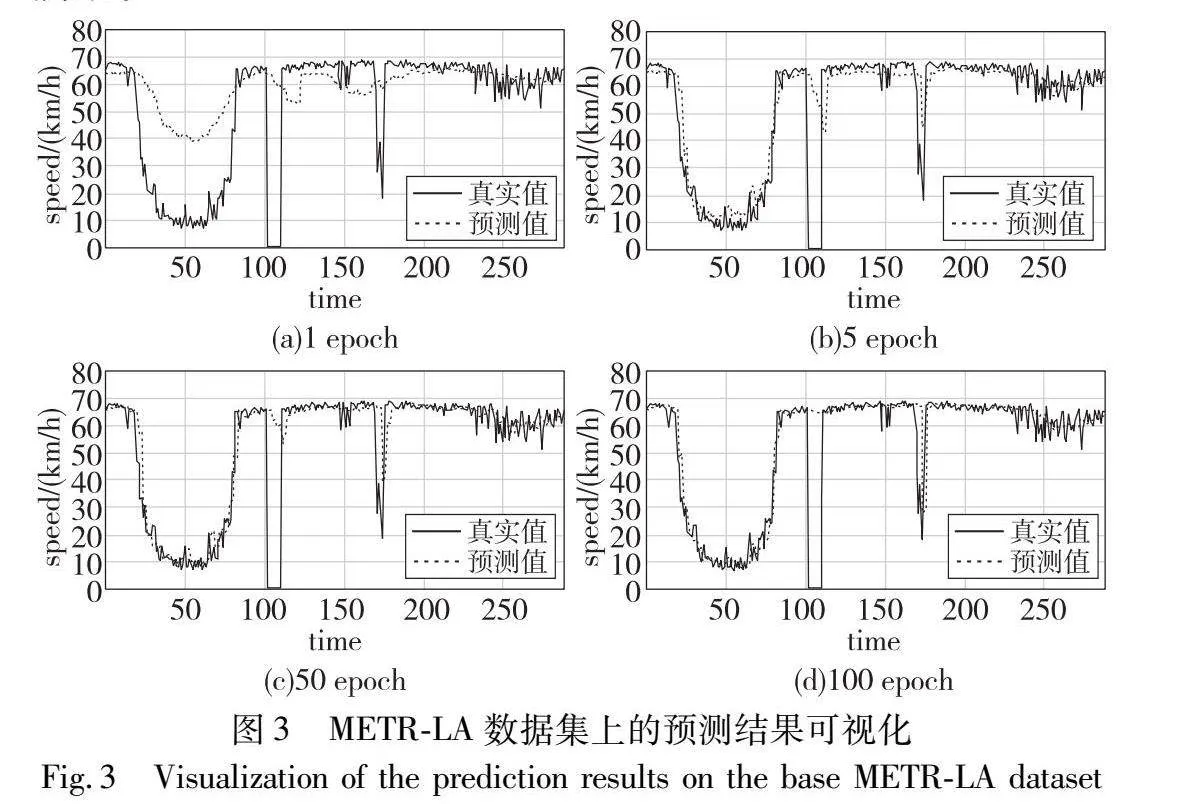
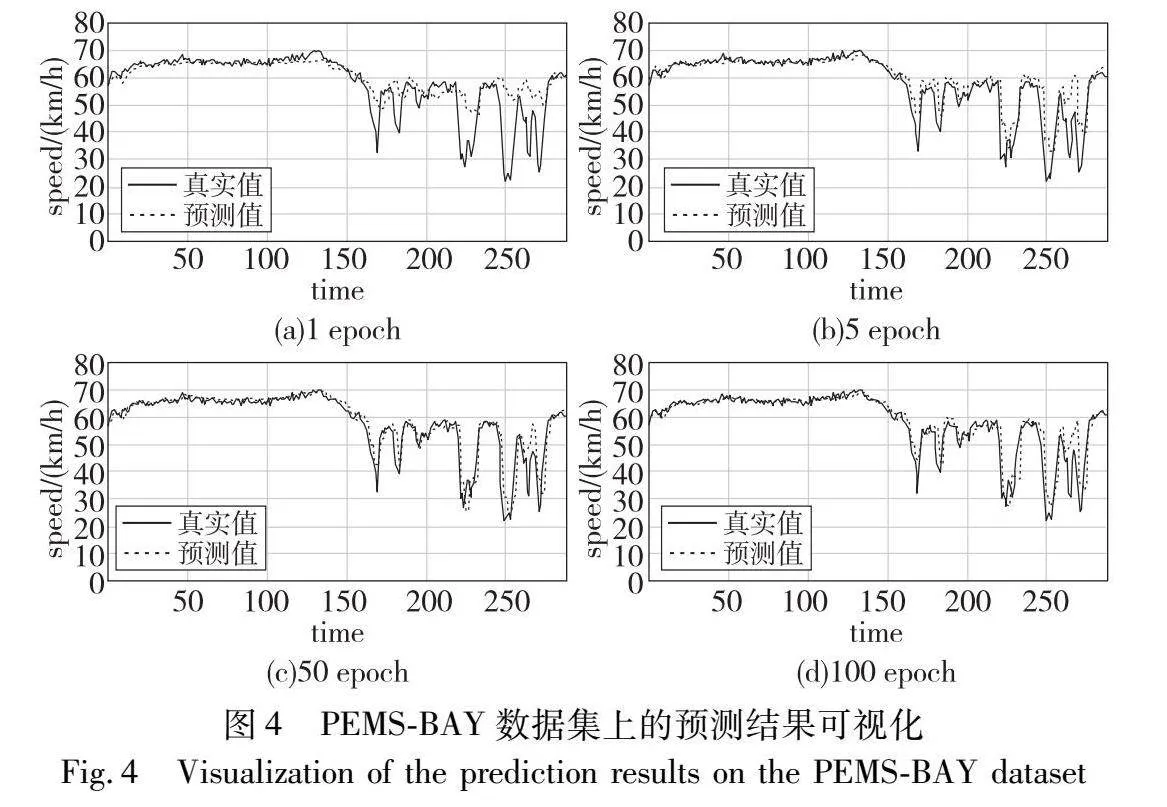
為了展示所提模型處理復雜交通情況的能力,在兩個真實數據集上進行案例研究。從每個數據集分別隨機選擇一個交通傳感器節點,時間間隔設置為5 min,利用ST-PAGNN獲得交通流預測值,并將其與每個時間段的真實值進行對比,在METR-LA和PEMS-BAY數據集上得到的可視化結果如圖3、4所示。
圖3中,提出模型在早期訓練階段(1個epoch)表現不佳,經過5個訓練epoch后,該模型整體上表現良好,但仍然不能很好地適應一些突變情況,如175個時間間隔附近。幸運的是,當執行50個epoch后,該模型的預測能力被繼續提升,且在100個epoch后幾乎可以完美地接近真實值。值得注意的是,該傳感器在第100個時間間隔附近存在一些缺失值(圖中顯示的數值為零)。經過100個訓練epoch后,提出模型能夠通過合理的預測來有效彌合這些缺失值的差距。
圖4中,對于從PEMS-BAY采樣的節點,真實值的曲線非常復雜,尤其是在末端。同樣,提出的模型能夠快速學習以獲得接近真實值的預測結果,表明該模型可以有效地處理復雜的交通流量預測問題。
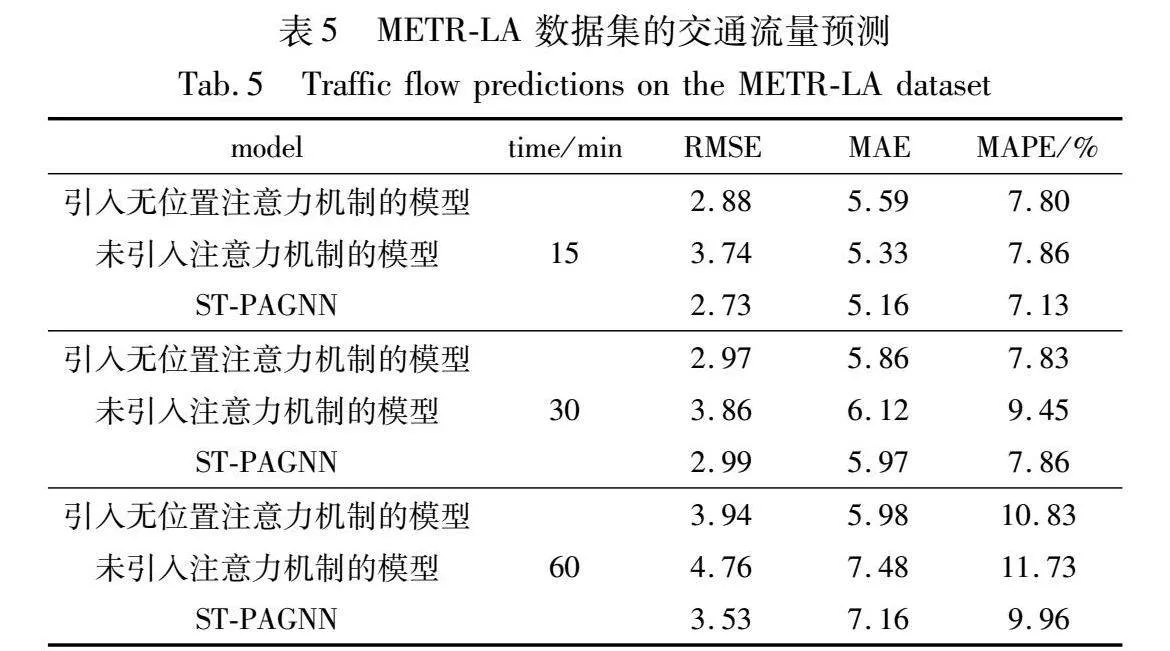
3.5 空間依賴性建模分析
為了驗證引入位置注意力機制的合理性,ST-PAGNN分別與引入無位置注意力的模型和未引入注意力的模型進行實驗對比,實驗數據集為METR-LA,如表5所示。
實驗結果表明,引入位置注意力的ST-PAGNN使得模型在RMSE、MAE和MAPE指標上均有所降低,例如,在15 min預測步長下,相較于引入無位置注意力機制的模型,ST-PAGNN在RMSE、MAE和MAPE指標分別降低了0.15、0.43和0.67百分點。引入位置注意力機制的ST-PAGNN可以更好地捕捉城市道路網絡中交通節點的空間依賴關系,從而使得交通流預測效果得以提升。
3.6 時間依賴性建模分析
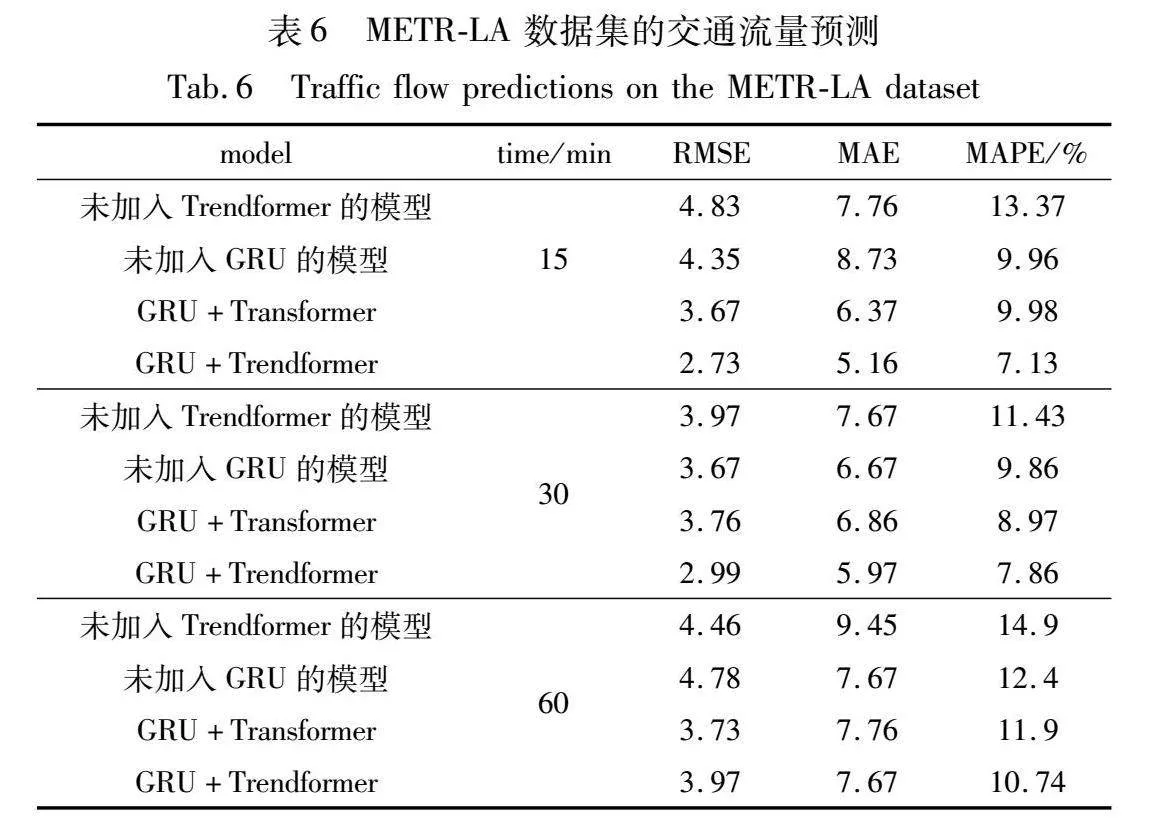
為了驗證GRU+Trendformer構建的合理性,ST-PAGNN分別與未加入Trendformer、未加入GRU和GRU+Transformer進行實驗對比,實驗數據集為METR-LA,如表6所示。
實驗結果表明,引入位置注意力機制的GRU+Trendformer使得模型在RMSE、MAE和MAPE指標上均有所降低,例如,在15 min預測步長下,相較于對比模型中表現較好的GRU+Transformer而言,引入位置注意力機制的GRU+Trendformer在RMSE、MAE和MAPE指標方面分別降低了0.94、1.21和2.85百分點。GRU層能夠捕捉時間依賴,Trendformer層可以捕捉長期時間依賴,引入帶有Trendformer層的門控遞歸神經網絡的ST-PAGNN可以更好地捕捉交通流序列在時間維度上的局部和全局信息,從而使得交通流預測效果得以提升。
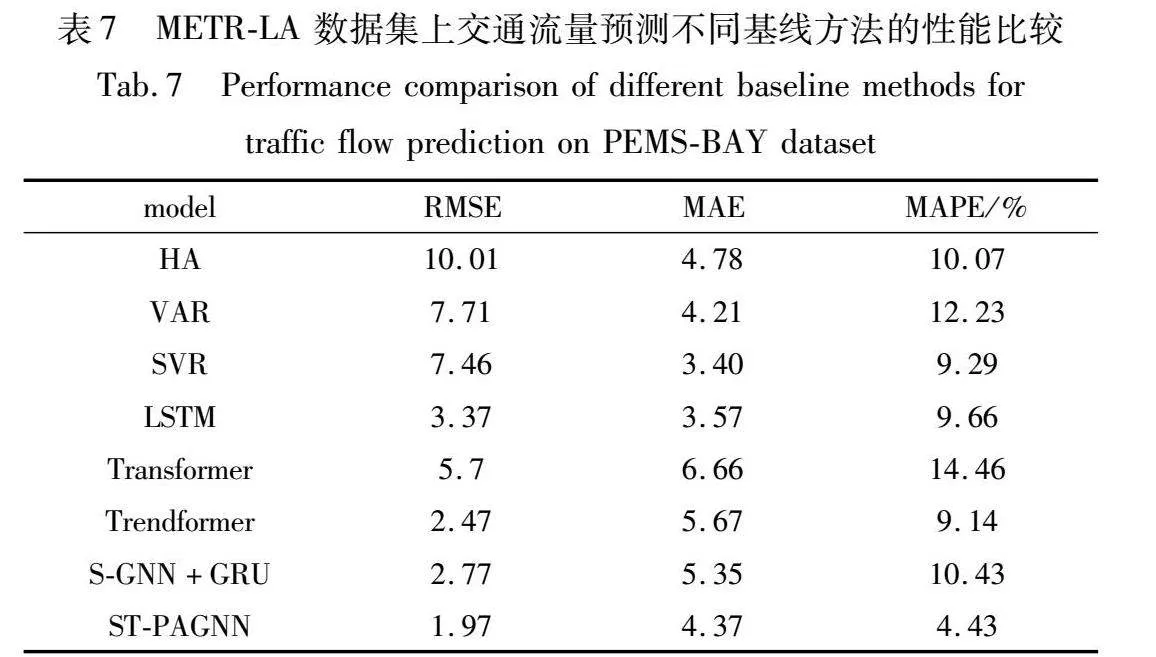
為了測試不同基線和模型的整體性能,本文測試了Trendformer在RMSE、MAE和MAPE三種指標上的精度,表7為各模型在PEMS-BAY數據集上對60 min時間步長的預測結果。LSTM相對比VAR和SVR等傳統的機器學習算法,取得了良好的效果,這說明LSTM給本文的模型提供了時空相關性。與改進的Trendformer相對比,Transformer在RMSE、MAE和MAPE三個指標上,分別下降了2.11%,2.99%和1.59%,這說明Trendformer相比Transformer能夠提供時空自適應學習以更好地捕獲數據的時空相關性。另外對ST-PAGNN各個組成部分進行消融實驗,對于S-GNN+GRN和Trendformer而言,ST-PAGNN在RMSE、MAE和MAPE指標上降低了0.80,0.98,6百分點和0.50,1.30和4.71百分點。當結合三種算法的時候,三個指標的誤差都有所下降。這驗證了Trendformer能夠很好地捕捉交通數據的時空相關性,同時在交流預測任務中具有普遍的實用性和有效性。
4 結束語
雖然目前已有一些關于預測未來交通流量的研究,但其中大多數研究在建立空間和時間依賴關系模型方面存在一定的局限性。因此,提出了一種新的時空圖神經網絡框架來解決交通流預測問題。通過實驗驗證了所提方法的有效性。通過以上分析和描述,可以得出以下結論:a)如果圖神經網絡帶有位置注意力機制,那么據此能夠對城市道路網絡中交通節點的空間依賴關系進行捕捉;b)利用帶有轉換層的門控遞歸神經網絡可以捕捉交通流序列在時間維度上的局部和全局信息。這有效證明了所提框架在解決交通預測問題方面的有效性和優越性。
然而,交通網絡與其他類型的網絡在結構和動態特性上存在許多差異。因此,直接將該模型應用于其他網絡結構或應用場景是不夠嚴謹的。為了更好地理解和利用這種時空模型,未來將在進一步分析不同網絡的特征和動態的基礎上,嘗試將其優勢應用于對社交網絡的分析和預測任務中。
參考文獻:
[1]周楚昊, 林培群. 基于多通道Transformer的交通量預測方法[J]. 計算機應用研究, 2023, 40(2): 435-439. (Zhou Chuhao, Lin Peiqun. Traffic flow prediction method based on multi-channel Transformer[J]. Application Research of Computers, 2023, 40(2): 435-439.)
[2]Li Mengzhang, Zhu Zhanxing. Spatial-temporal fusion graph neural networks for traffic flow forecasting[C]// Proc of AAAI Conference on Artificial Intelligence. Palo Alto, CA: AAAI Press, 2021: 4189-4196.
[3]劉衛明, 羅全成, 毛伊敏, 等. 基于Spark和AMPSO的并行深度卷積神經網絡優化算法[J]. 計算機應用研究, 2023, 40(10): 2957-2966. (Liu Weiming, Luo Quancheng, Mao Yimin,et al. Pa-rallel deep convolutional neural network optimization algorithm based on Spark and AMPSO[J]. Application Research of Computers, 2023, 40(10): 2957-2966.)
[4]Wang Haoxiang, Smys S. Big data analysis and perturbation using data mining algorithm[J]. Journal of Soft Computing Paradigm, 2021, 3(1): 19-28.
[5]劉起東, 劉超越, 邱紫鑫, 等. 基于時間感知Transformer的交通流預測方法[J]. 計算機科學, 2023, 50(11): 88-96. (Liu Qidong, Liu Chaoyue, Qiu Zixin,et al. Time-aware Transformer for traffic flow forecasting [J]. Computer Science, 2023, 50(11): 88-96.)
[6]Shu Wanneng, Cai Ken, Xiong N N. A short-term traffic flow prediction model based on an improved gate recurrent unit neural network[J]. IEEE Trans on Intelligent Transportation Systems, 2021, 23(9): 16654-16665.
[7]Ma Xiaolei, Dai Zhuang, He Zhengbing,et al. Learning traffic as ima-ges: a deep convolutional neural network for large-scale transportation network speed prediction[J]. Sensors, 2017, 17(4): 818.
[8]Fu Rui, Zhang Zuo, Li Li. Using LSTM and GRU neural network methods for traffic flow prediction[C]// Proc of the 31st Youth Academic Annual Conference of Chinese Association of Automation. Piscataway, NJ: IEEE Press, 2016: 324-328.
[9]Li Chensheng, Qin Xiaowei, Xu Xiaodong,et al. Scalable graph convolutional networks with fast localized spectral filter for directed graphs[J]. IEEE Access, 2020, 8: 105634-105644.
[10]Liu Yanbei, Wang Qi, Wang Xiao,et al. Community enhanced graph convolutional networks[J]. Pattern Recognition Letters, 2020, 138: 462-468.
[11]Yu Bing, Yin Haoteng, Zhu Zhanxing. Spatio-temporal graph convolutional networks: a deep learning framework for traffic forecasting[C]// Proc of the 27th International Joint Conference on Artificial Intelligence. [S.l.]: International Joint Conferences on Artificial Intelligence Organization, 2017: 3634-3640.
[12]Guo Shengnan, Lin Youfang, Feng Ning,et al. Attention based spatial-temporal graph convolutional networks for traffic flow forecasting[C]// Proc of the 33rd AAAI Conference on Artificial Intelligence and the 31st Innovative Applications of Artificial Intelligence Confe-rence and the 9th AAAI Symposium on Educational Advances in Artificial Intelligence. Palo Alto, CA: AAAI Press, 2019: 922-929.
[13]Zhao Ling, Song Yujiao, Zhang Chao,et al. T-GCN: a temporal graph convolutional network for traffic prediction [J]. IEEE Trans on Intelligent Transportation Systems, 2020, 21(9): 3848-3858.
[14]Seo Y, Defferrard M, Vandergheynst P,et al. Structured sequence modeling with graph convolutional recurrent networks[M]// Cheng Long, Leung A C S, Ozawa S. Neural Information Processing. Cham: Springer International Publishing, 2018: 362-373.
[15]Wang Yunbo, Long Mingsheng, Wang Jianmin,et al. PredRNN: recurrent neural networks for predictive learning using spatiotemporal LSTMs[C]// Proc of the 31st International Conference on Neural Information Processing Systems. Red Hook, NY: Curran Associates Inc., 2017: 879-888.
[16]倪慶劍, 彭文強, 張志政, 等. 基于信息增強傳輸的時空圖神經網絡交通流預測[J]. 計算機研究與發展, 2022, 59(2): 282-293. (Ni Qingjian, Peng Wenqiang, Zhang Zhizheng,et al. Spatial-temporal graph neural network for traffic flow prediction based on information enhanced transmission[J]. Journal of Computer Research and Development, 2022, 59(2): 282-293.)
[17]Li Cong, Xu Pei. Application on traffic flow prediction of machine learning in intelligent transportation[J]. Neural Computing and Applications, 2021, 33(2): 613-624.
[18]Toan T D, Truong V H. Support vector machine for short-term traffic flow prediction and improvement of its model training using nearest neighbor approach[J]. Transportation Research Record, 2021, 2675(4): 362-373.
[19]Hao Miao, Shen Jiaxing, Cao Jiannong,et al. MBA-STNet: Bayes-enhanced discriminative multi-task learning for flow prediction[J]. IEEE Trans on Knowledge and Data Engineering, 2023, 35(7): 7164-7177.
[20]Peng Jiaxin, Xu Yongneng, Wu Menghui. Short-term traffic flow forecast based on ARIMA-SVM combined model[M]// Wang Wuhong, Wu Jianping, Jiang Xiaobei,et al. Green Transportation and Low Carbon Mobility Safety. International Conference on Green Intelligent Transportation System and Safety. Singapore: Springer Nature Singapore, 2021: 287-300.
[21]Kashyap A A, Raviraj S, Devarakonda A,et al. Traffic flow prediction models–a review of deep learning techniques[J]. Cogent Engineering, 2022, 9(1): 2010510.
[22]Qu Zhaowei, Li Haitao, Li Zhihui,et al. Short-term traffic flow forecasting method with M-B-LSTM hybrid network[J]. IEEE Trans on Intelligent Transportation Systems, 2020, 23(1): 225-235.
[23]Zheng Haifeng, Lin Feng, Feng Xinxin,et al. A hybrid deep learning model with attention-based conv-LSTM networks for short-term traffic flow prediction[J]. IEEE Trans on Intelligent Transportation Systems, 2020, 22(11): 6910-6920.
[24]Han Xu, Gong Shicai. LST-GCN: long short-term memory embedded graph convolution network for traffic flow forecasting[J]. Electro-nics, 2022, 11(14): 2230.
[25]Liu Daoguang, Hui Shen, Li Li,et al. A method for short-term traffic flow forecasting based on GCN-LSTM[C]// Proc of International Conference on Computer Vision, Image and Deep Learning. Pisca-taway, NJ: IEEE Press, 2020: 364-368.
[26]Chauhan N S, Kumar N. Traffic flow forecasting using attention enabled Bi-LSTM and GRU hybrid model[C]// Proc of International Conference on Neural Information Processing. Singapore: Springer Nature Singapore, 2022: 505-517.
[27]Huang Lei, Zhu Feng, Li Zhiheng. Trendformer: trend adaptive transformer for traffic flow prediction[C]// Proc of the 5th International Conference on Data Science and Information Technology. Piscataway, NJ: IEEE Press, 2022: 1-6.
[28]Wang Chunzhi, Wang Lu, Wei Siwei,et al. STN-GCN: spatial and temporal normalization graph convolutional neural networks for traffic flow forecasting[J]. Electronics, 2023, 12(14): 3158.
[29]賀文武, 裴博彧, 毛國君, 等. 基于輕量時空圖卷積模型的路網交通流預測[J]. 鐵道科學與工程學報, 2022, 19(9): 2552-2562. (He Wenwu, Pei Boyu, Mao Guojun,et al. Traffic flow forecasting based on lightweight spatial-temporal graph convolution networks model[J]. Journal of Railway Science & Engineering, 2022, 19(9): 2552-2562.)
[30]Smith L N. Cyclical learning rates for training neural networks [C]// Proc of IEEE Winter Conference on Applications of Computer Vision. Piscataway, NJ: IEEE Press, 2017: 464-472.
[31]Yuan Lilian, Fang Weilin, Xiao Hongbo,et al. Short-term traffic flow prediction by graph deep learning with spatial temporal modeling[C]// Proc of the 2nd International Conference on Electronic Information Technology and Smart Agriculture. Piscataway, NJ: IEEE Press, 2022: 172-177.
[32]Wang Luxuan, Bai Lei, Li Ziyue,et al. Correlated time series self-supervised representation learning via spatiotemporal bootstrapping[C]// Proc of the 19th International Conference on Automation Science and Engineering. Piscataway, NJ: IEEE Press, 2023: 1-7.
[33]Bai Lei, Yao Lina, Li Can,et al. Adaptive graph convolutional recurrent network for traffic forecasting[C]// Proc of the 34th International Conference on Neural Information Processing Systems. Red Hook, NY: Curran Associates Inc., 2020: 17804-17815.