基于YOLOv8的智慧校園安防檢測功能
2024-10-15 00:00:00李倩孫偉翟劍錕
今日自動化 2024年3期
[摘 要]智慧校園包含園區內設備設施、智能系統、集成平臺、大數據技術平臺、業務平臺、決策和計劃平臺,應用于園區管理、教學管理、后勤保障、日常辦公、園區安全、文化宣傳等方面。智慧校園包含數字視頻監控系統、電子巡更系統、周界防范系統3 部分,其中電子巡更系統存在人員排班,無法實現24 h 覆蓋巡更線路和非巡更線路的巡檢任務,而周界防范系統誤報率高,設備故障多,無法實現穩定持續的周界監控功能。文章采用視頻流作為輸入媒體,采用先進的識別分類模型,實現電子巡更系統24 h 全覆蓋業務功能,解決周界防范系統誤報率高和人為破壞的缺點,加強校園周邊和重要區域的安防業務功能。
[關鍵詞]智慧校園;電子巡更; 周界防范; 預訓練模型; YOLOv8 ; 目標檢測
[中圖分類號]TP183 [文獻標志碼]A [文章編號]2095–6487(2024)03–0139–03
1 概述
文章選用YOLOv8框架目標識別技術,采用預訓練模型和實際業務結合的工程實踐方式,實現視頻電子巡更功能,完善人員固定線路、固定班次的巡更覆蓋度不夠的問題,彌補周界防范系統誤報率高、設備故障率高的不足,實現智慧校園內安防系統中,園區邊界的防范業務24 h 檢測和全覆蓋檢測。
2 智慧校園
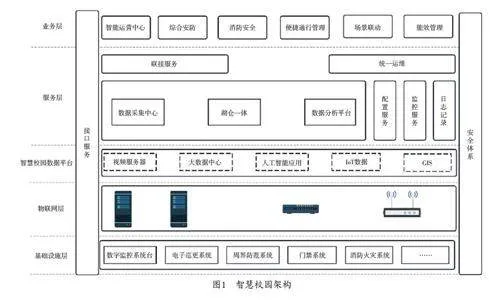
智慧校園是綜合園區內設施、設備、子系統、物聯網、大數據、人工智能、GIS 等,實現園區智能化綜合管理和統一運營的管控、業務平臺。智慧校園綜合安防部分包括數字監控系統、電子巡更系統、周界防范系統和消防火災系統等,智慧校園架構如圖1所示。
數字監控系統由網絡攝像頭、網絡控制和存儲設備及顯示設備組成。網絡攝像頭(IP camera)包括固定位置的槍機和半球與360°的球機兩種類型。攝像頭采集監控區域視頻信號,內置WebServer 配置功能,并將視頻處理后通過網絡傳輸給控制設備。控制設備包括數據視頻錄像機(DVR)和網絡視頻錄像機(NVR),它們的主要工作流程包括采集網絡攝像頭視頻流數據、視頻編碼、視頻存儲、實現視頻回放、視頻備份、視頻傳輸、遠程訪問和控制、報警功能、系統日志和報告及維護和管理等。監控設備包括電視墻、視頻矩陣、LED 顯示大屏等,主要應用于視頻監控的在線監控視頻流顯示、畫面分割、畫面標注、報警處理等。
電子巡更系統是園區內巡邏人員手持巡檢器,沿著規定的路線巡查,同時在規定的時間內到達巡檢地點。巡檢器會自動記錄到達該地點的時間和巡檢人員,然后通過數據通訊線將巡檢器連接計算機,將數據上傳到系統中記錄,對巡檢數據進行自動分析并智能處理,對應時間查看巡更點和巡更人員名稱。
周界防范系統,又稱電子圍欄,一般由探測部分、信號傳輸部分、報警聯動部分和控制部分組成。探測部分包括紅外對射、脈沖電子圍欄、振動光纖、可見光視頻周界相機、熱成像相機、入侵安防雷達、激光掃描探測器。在需要被保護的區域安裝周界防范系統,當有人企圖穿越被保護區域四周的邊界時,邊界上的探測裝置探測到入侵后發出入侵警報信號,同時通過傳輸部分將入侵信號發送至報警聯動部分提示相關人員處理。系統能夠迅速發出警報并提供報警位置,從而能夠更加有效地協助安保人員處理闖入事件,提高布防區域的安全防范能力,是園區安防系統的第一道防線。
3 YOLOv8
YOLOv8 模型是Ultralytics 公司最新推出的檢測模型,是目前較為先進的目標檢測模型框架。YOLOv8 是用于圖像分類、對象檢測、實例分割推理和訓練的統一框架。其支持多種 API(包括命令行、Python 兩種方式)、更快更準確、支持物體檢測、實例分割、圖像分類、可擴展到所有以前的版本、新骨干網絡、新的Anchor-Free head、新的損失函數,框架還高效靈活地支持多種導出格式,支持多種終端(優化的框架、嵌入式設備、CPU、GPU、服務端、服務端優化技術TensorRT),并且該模型可以在CPU 和GPU 上運行。
3.1 模型結構
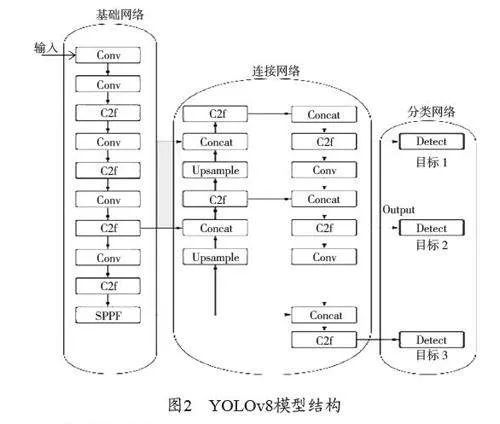
YOLOv8 模型結構包含3 個組成部分:Backbone、Neck、Head。其中,Backbone 提取原始數據的特征,Neck 融合特征,Head 進行分類或回歸使得數據更加準確。Backbone 主干網絡主要由CSPDarknet53 組成,包含10 層網絡(0~9 層),有CBS、C2F、SPPF3 種結構。主干網絡是特征提取網絡,可提取圖像數據特征信息供后面的網絡使用。Neck 部分由SPP(Conv×3+Concat+Conv×3)和PANet 網絡構成,包含12 層網絡(10~21 層)。SPP 的功能是增加感受野作用,PANet 的功能是將提取的特征信息轉換為坐標、類別等信息,其主要由上采樣和下采樣組成。Head部分包含3 個檢測頭,主要功能是得到輸出模型結果。YOLOv8 模型結構如圖2 所示。
3.2 模型版本匯總
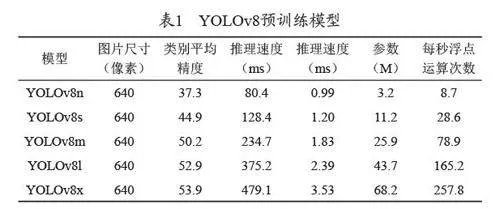
YOLOv8 提供了5 個不同規模的預訓練模型:nano、small、medium、large 和extra large, 分別適應不同設備和應用場景的計算機視覺任務。作為預訓練模型,它們的性能優秀、穩定性強、泛化能力強。YOLOv8 預訓練模型見表1。
4 視頻巡更目標檢測
采用YOLOv8 預訓練模型:
from ultralytics import YOLO
# load a pretrained model (recommended for training)
model = YOLO("YOLOv8n.pt")
測試模型推理效果:
r e s u l t s =mo d e l . p r e d i c t ( t a s k = ' d e t e c t ' ,source=person.jpg',save=True,stream=True)
預測函數說明:task 任務類型為目標檢測;source 檢測源,生產環境采用流媒體推流RTSP 格式;classes 是目標檢測類型,由平臺定義監控點監控物體類型和報警類型;save 保存檢測結果。
5 電子圍欄目標檢測
采用YOLOv8 預訓練模型( 生產環境選用YOLOv8x 版本):
from ultralytics import YOLO
# load a pretrained model (recommended for training)
model = YOLO("YOLOv8n.pt")
測試模型推理效果:
r e s u l t s =mo d e l . p r e d i c t ( t a s k = ' d e t e c t ' , source=person.jpg',save=True,stream=True)
預測函數參數說明:task 任務類型為目標檢測;source 檢測源,生產環境采用流媒體推流RTSP 格式;classes 是目標檢測類型;0 是person 檢測人;save 保存檢測結果。
6 平臺業務功能
6.1 視頻巡更功能
采用分類模型補充電子巡更系統,實現24 h 線路巡更和關鍵部位與區域的巡檢。平臺定義巡更攝像頭、巡更時間段、巡更線路、巡更區域。按照異常狀態/正常狀態= 異常率,定義報警閾值上報巡更警報,平臺定義重點區域的巡檢包括圖書館煙霧火災檢測、財務室人員闖入、自習室人員聚集等模式檢測。
6.2 周界防范檢測功能
補充周界防范系統,解決誤報率高、無法識別目標類型的問題。平臺定義周界防范目標類型包括人員闖入、動物闖入、飛禽闖入等。周界防范系統報警聯動視頻目標識別,確定當前的闖入物類型并生成平臺報警事件,減少誤報率,提高周界防范系統的準確率,同時減少人工成本,極大地加強了校園周界的檢測功能。
6.3 生產環境布署
YOLOv8 將模型參數導出為onnx 格式,onnx 轉為tensorrt 的engine 模型。推理模型選擇啟用GPU設備。數字視頻監控可以配置攝像頭本身視頻流,或者采用流媒體推流,流媒體推流會有一定的延時。制作docker 鏡像包含模型、權重和優化加速部分。布署在K8S 集群中實現,業務功能平臺化,參數可配置。
7 結論
(1)作為YOLOv8 多模態、多尺寸的模型,模型結構優化空間很小,不建議修改,會極大地影響模型泛化能力,導致一些場景的欠擬合現象。
(2)預訓練模型YOLOv8 提供了目標檢測的5 種尺寸,可適應不同設備,對于本項目采用L 還是X,要在實際的應用中不斷地調整權重和相關預測參數,優化實際的應用場景。
(3)模型的加速和性能優化都是在生產環境中必須要實現的過程,和實驗室測試性能為目標的操作差異性很大。
(4)平臺級別的技術包括鏡像、GPU、K8S,都是在工程實踐中,一步步摸索和優化出來的布署模式和研發方向。
(5)平臺級別產品布署周期長,維護成本相對偏高。
(6)視頻流處理也是平臺非常重要的部分,無論是攝像頭拉流還是中流媒體中心拉流,都存在延時的問題。
(7)視頻巡更有兩種方式,即定義巡更線路、巡更點和班次與全天24 h 監控重點部位、防火部位、圖書館、機要室、檔案室等。無論出現什么類型的目標一律識別并上傳至平臺生成報警事件。
(8)周界防范系統的視頻檢測在夜間經常有動物、物體等誤報情況,對于鷹眼的向下檢測效果比較理想,目前平臺拓展出鷹眼朝向天空,檢測不明飛行物,同時聯動飛行物雷達等精密儀器,保證警報處理的正確和有效。
參考文獻
[1] 楊建軍. 基于物聯網的智慧校園平臺設計[J]. 山西大同大學學報(自然科學版),2023,39(1):21-27.
[2] 孟青云,戴佳蔚,查佳佳,等. 基于YOLOv8 算法的常用手勢識別[J]. 現代儀器與醫療,2023,29(4):12-20.
