基于無人機的交通事故嚴重程度檢測
2024-10-17 00:00:00唐梓峰唐陽山潘迪敬宋東明趙會鵬
現代電子技術 2024年20期

摘" 要: 針對交通事故嚴重程度檢測速度慢的問題,對較為先進的YOLOv8算法進行改進。通過引入GAM注意力機制和GELAN結構,提高模型對交通事故嚴重程度數據集的識別準確性。與此同時,通過模型輕量化處理和調整參數量,降低復雜度和計算量,增強實用性,使模型更易于部署和運行。實驗結果表明,改進后的YOLOv8?GELAN?GAM模型在準確率、mAP@0.5、Recall等關鍵指標上分別提升了2.9%、1.9%、1.8%,在捕捉碰撞后位置變化小或形變量小的事故車輛方面表現更出色。在復雜背景下,改進后的YOLOv8?GELAN?GAM模型也能避免漏檢和誤檢。總體而言,改進后的YOLOv8?GELAN?GAM模型能夠為交通安全研究提供有力支持,提升道路救援的速度,提高道路交通安全水平,為事故損失提供強有力的保障。文中研究可為交通安全技術發展提供新的思路。
關鍵詞: 交通事故檢測; YOLOv8算法; GELAN結構; GAM注意力機制; 嚴重程度檢測; 目標識別
中圖分類號: TN919?34; TP391.41" " " " " " " " " "文獻標識碼: A" " " " " " " " " 文章編號: 1004?373X(2024)20?0123?06
Traffic accident severity detection based on drone
TANG Zifeng, TANG Yangshan, PAN Dijing, SONG Dongming, ZHAO Huipeng
(College of Automotive and Traffic Engineering, Liaoning University of Technology, Jinzhou 121001, China)
Abstract: In allusion to the problem of traffic accident severity detection speed, the more advanced YOLOv8 algorithm is improved. The accuracy of the model in identifying the severity of traffic accidents in the dataset is improved by introducing GAM attention mechanism and GELAN structure. Meanwhile, by lightweight processing of the model and adjusting the number of parameters, the complexity and calculation amount are reduced, the practicality is enhanced, making the model easier to deploy and run. The experimental results show that the improved YOLOv8?GELAN?GAM model has improved the accuracy, mAP, Recall and other key indicators by 2.9%, 1.9% and 1.8% respectively, especially in capturing accident vehicles with small position changes or small shape variables after collision. Under complex background, the improved YOLOv8?GELAN?GAM model can also avoid missing and 1 detection. The improved YOLOv8?GELAN?GAM model can provide a strong support for traffic safety research, improve the speed of road rescue, improve the level of road traffic safety, and provide a strong guarantee for accident losses. It can provide a new idea for the development of traffic safety technology.
Keywords: traffic accident detection; YOLOv8 algorithm; GELAN structure; GAM attention mechanism; severity detection; target recognition
0" 引" 言
隨著機動車數量的逐年增加,道路交通需求持續增長,交通事故也愈發頻繁。這些事故不僅造成了大量的人員傷亡和財產損失,也對社會的和諧穩定構成了威脅。為了提高交通事故檢測的效率,本文對交通事故嚴重程度的檢測開展研究。
交通事故檢測主要分為非自動和自動兩種方法[1]。非自動檢測依賴于人工,如電話報警等。自動檢測則利用先進技術,如文獻[2]通過ELM進行目標分類,實現了道路中交通事故的檢測。蔣紅亮利用深度學習模型SSD進行車輛檢測,結合圖像分割模型SkipASPPNet實現了車輛碰撞的檢測[3]。汪霜霜提出稀疏學習的方法對車輛軌跡進行學習,通過監測車輛軌跡的變化來檢測交通事故[4]。文獻[5]中利用反向傳播算法調整深度網絡模型參數,實現了對城市交通場景中交通事件的檢測。文獻[6]中使用加權極限學習機實現了高效的交通事故檢測。文獻[7]中通過分析交通流參數變化規律,實現了交通事故檢測。文獻[8]中利用ViBe視覺背景提取器提取目標,通過分析運動目標矩形框在正常行駛和事故發生時的寬度變化特征,實現了對道路中追尾和交叉路口事故的檢測。文獻[9]中采用改進的YOLOv4算法進行檢測,利用關鍵幀車輛速度預測獲取車輛的運動軌跡,實現了對車輛追尾、超速等交通事件的準確檢測。文獻[10]將毫米波雷達和攝像機相結合,實現了適用于各種場景的交通事故檢測。王卓采用Gabor濾波器對視頻中車輛進行持續跟蹤和行為識別,實現了對監控視頻中的交通事故等異常情況的檢測[11]。高新聞等人結合YOLOv3改進了SORT多目標跟蹤框架,實現了對行人、停車和車輛變道等交通行為的精準判別[12]。吳蘭等人通過剪枝方法優化YOLOv3,提高了檢測速度[13]。金媛媛等人對車輛行駛行為進行建模處理,計算事故概率,設定閾值來預測事故[14]。
由此可見,對交通事故的檢測主要有建模與目標識別這兩種方式。建模需要時間較長,對救援速度有較大影響;而目標檢測所需時間較短,更適合救援時所用。本文將基于目標檢測對交通事故嚴重程度進行識別,進而為交通安全貢獻一份力量。
1" 相關工作
1.1" YOLOv8的選取
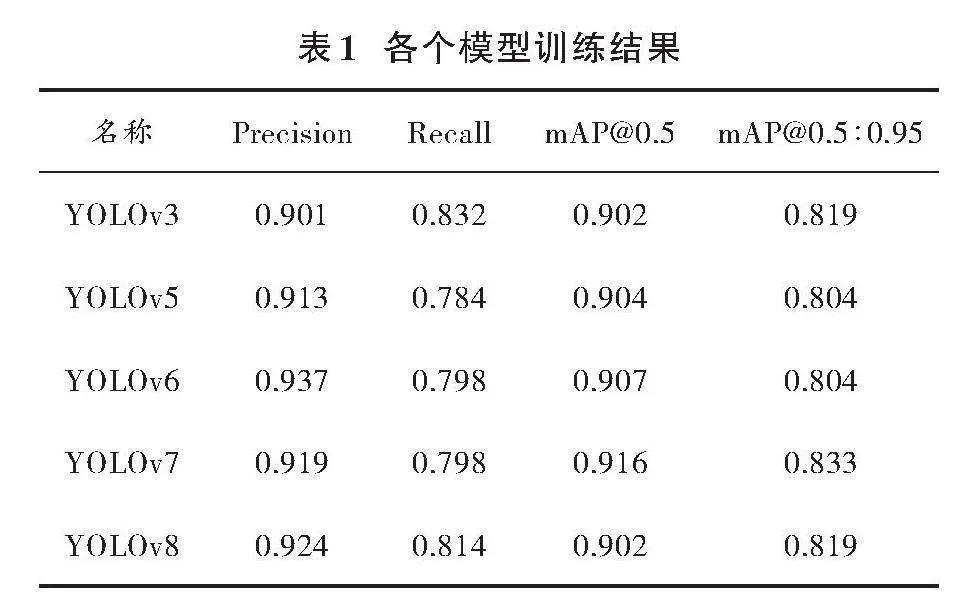
基于檢測速度的考量,采用YOLO算法對交通事故嚴重程度進行檢測,而具體選取哪一個算法需要進行比較,具體對比如表1所示。結合表1可知,盡管YOLOv6準確率最高,YOLOv3的召回率最好,但是綜合來看YOLOv8指標更優,故選取YOLOv8作為研究算法。
1.2" YOLOv8算法介紹
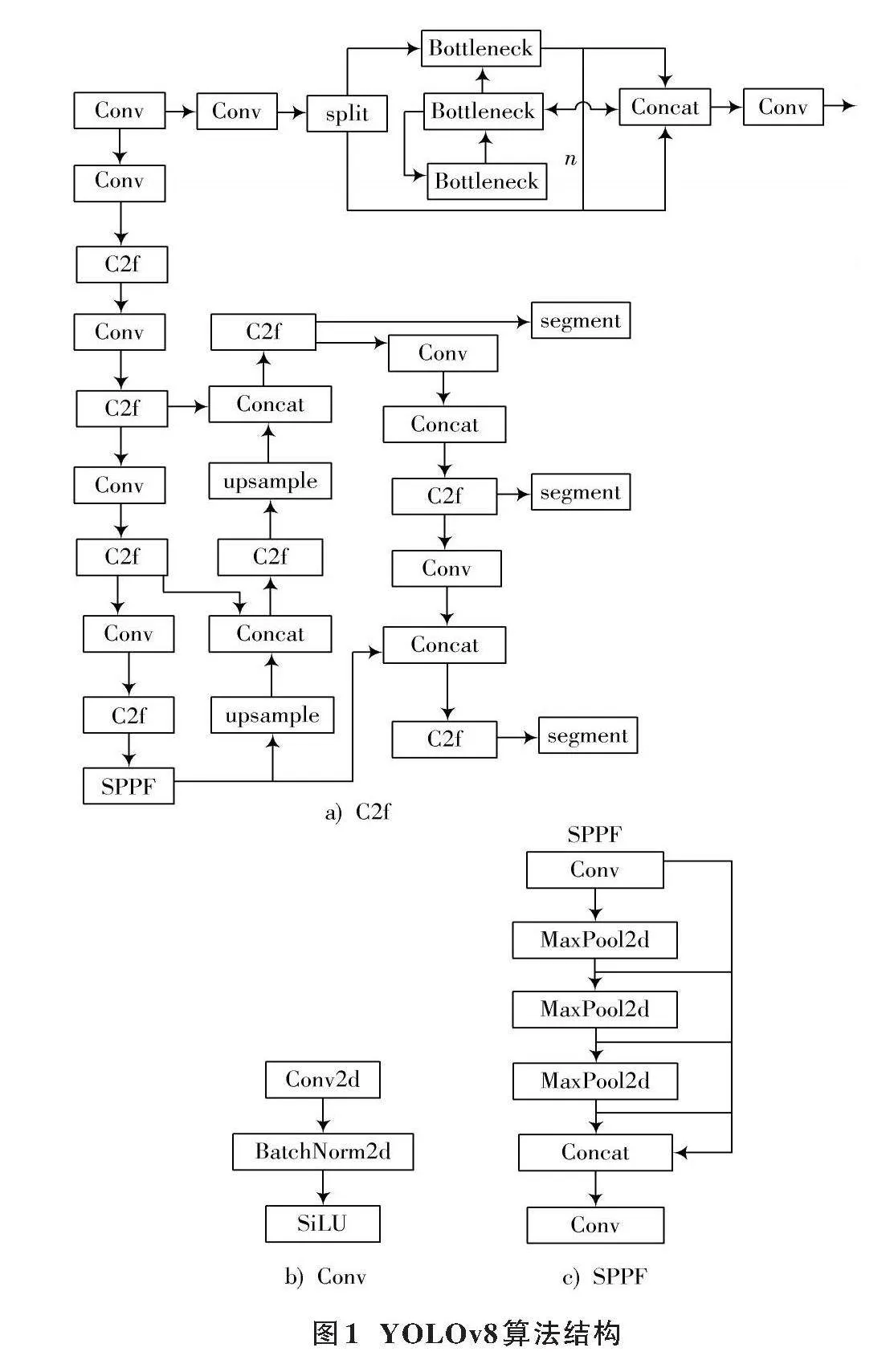
YOLOv8 是一個 SOTA 模型,它建立在以往YOLO 版本的基礎上,并有新的功能和改進,可以進一步提升性能和靈活性。YOLOv8算法結構如圖1所示。
由圖1可知,YOLOv8目標識別算法主要部分為input、backbone、head和neck。backbone從輸入圖像中提取高級語義特征,以捕捉物體的形狀、紋理和上下文信息;neck的主要目標是將不同尺度的特征圖進行融合,以便更好地檢測不同大小和尺度的目標;融合后的特征圖被傳遞給head進行目標檢測。最新的單目標檢測算法摒棄Anchor Boxes,改用Anchor?Free,解決了定位不精準和正負樣本不平衡問題。
輸入端主要有馬賽克(Mosaic)數據增強、自適應錨框計算和自適應灰度填充。骨干網絡有Conv、C2f和SPPF(Spatial Pyramid Pooling Fusion)結構。其中,C2f模塊是對殘差特征進行學習的主要模塊,該模塊根據 YOLOv7的ELA結構,通過更多的分支跨層連接,使模型具有更為豐富的梯度流,形成具有更強特征表示能力的神經網絡模塊。頸部網絡采用路徑聚合網絡(Path Aggregation Network, PAN)結構,可加強網絡對不同縮放尺度對象的特征融合能力。頭部網絡將分類和檢測過程進行解耦,主要包括損失計算和目標檢測框篩選。其中,損失計算過程主要包括正負樣本分配策略和Loss計算,在YOLOv8網絡中主要使用Task Aligned Assigner分配策略,即根據分類與回歸的分數加權結果選擇正樣本;損失計算涵蓋分類和回歸兩個分支。其中,分類分支采用了二元交叉熵損失(Binary Cross Entropy Loss, BCE Loss)進行訓練;回歸分支則結合分布焦點損失(Distribution Focal Loss, DF Loss)和完全交并比損失 函數(Complete Intersection" Over Union Loss, CIoU Loss),以提升模型對邊界框預測的精準性。
2" 數據集介紹
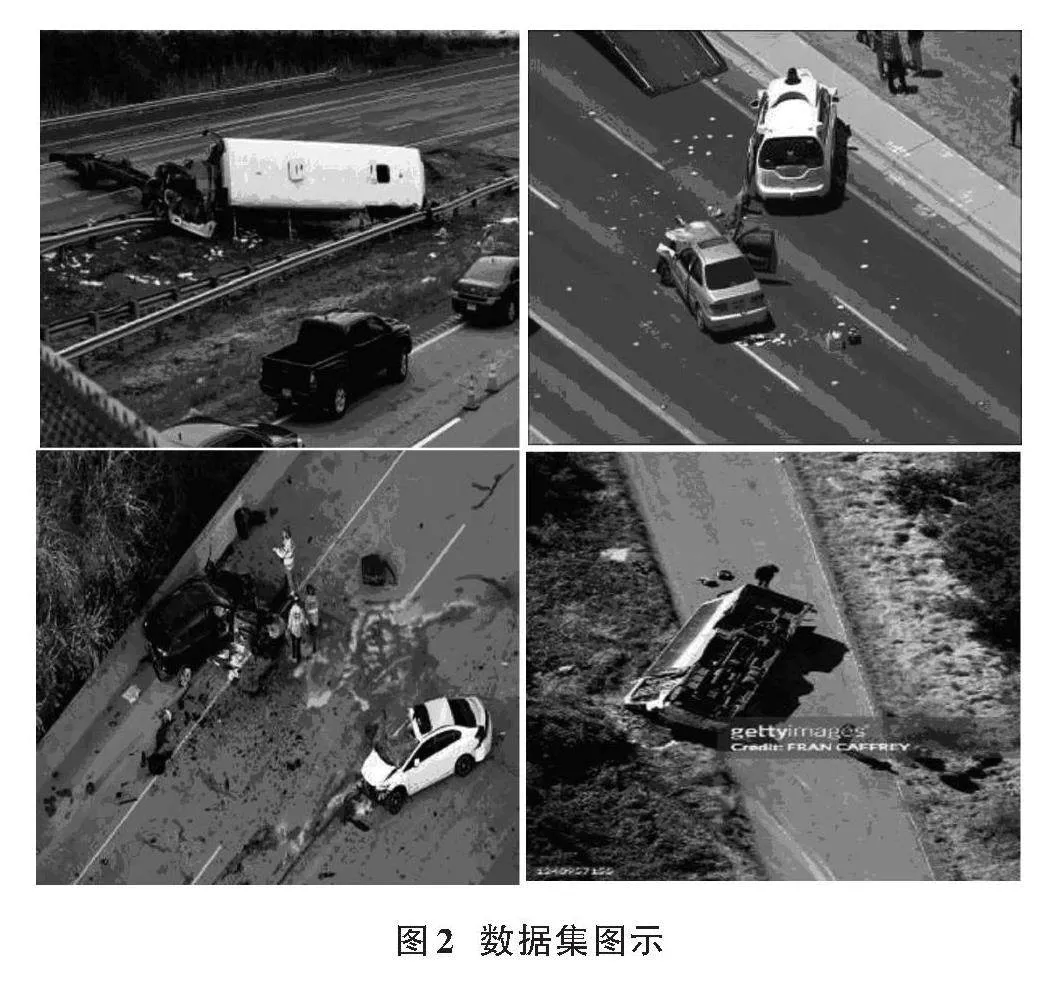
本文選用開源數據集,數據是通過使用無人機對交通事故現場進行拍攝得到的,共有12 122張圖像,劃分為訓練集、測試集和驗證集,圖像數量分別為10 469張、649張和1 004張,占比分別為86.37%、5.35%和8.28%。圖像標注分成兩類:輕微、中等與嚴重,分別用0與1表示。數據集圖示如圖2所示。
3" 檢測算法改進
3.1" 改進算法結構
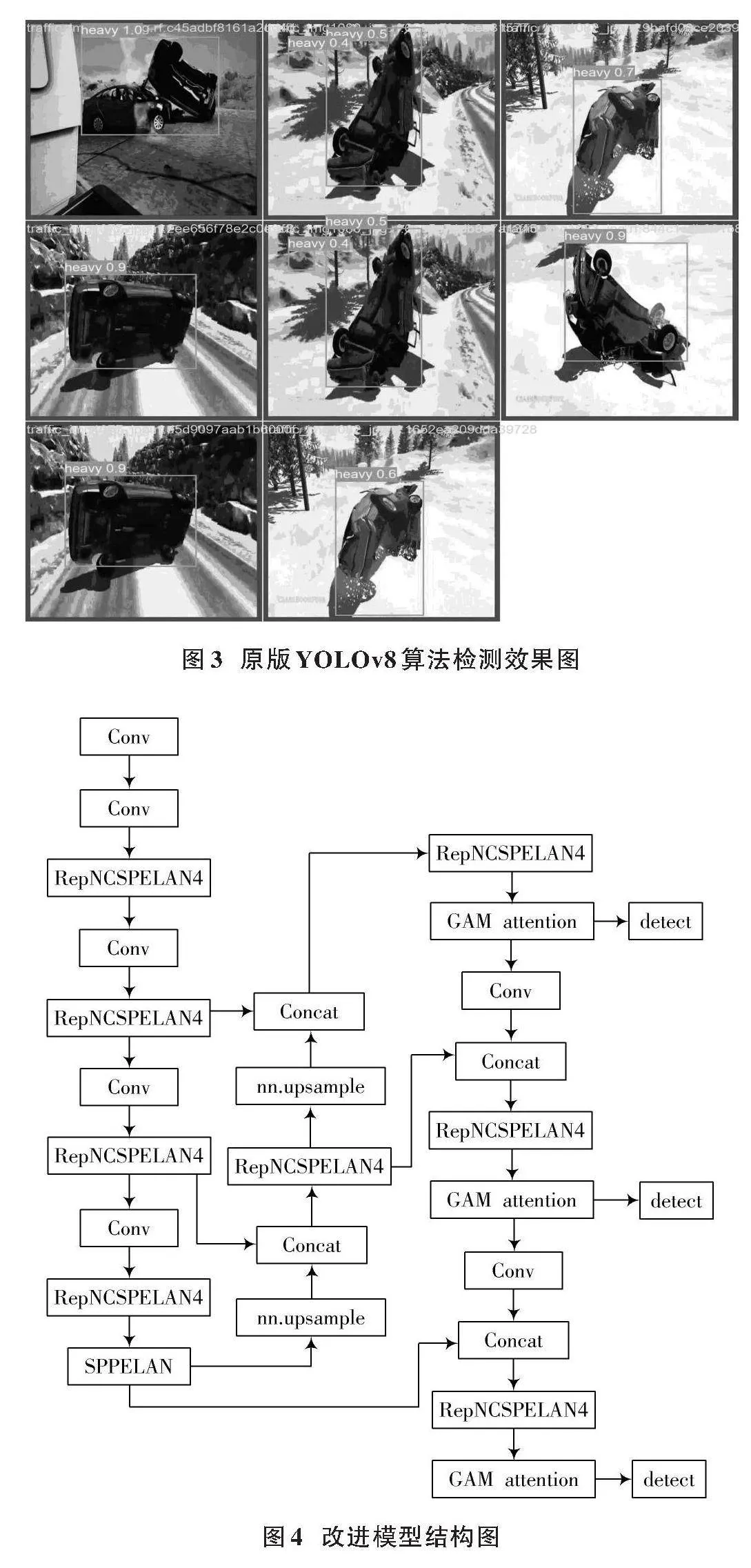
在實驗過程中發現,原版YOLOv8算法會有置信度不高的情況,即將背景中的大石頭等檢測為交通事故,如圖3所示。
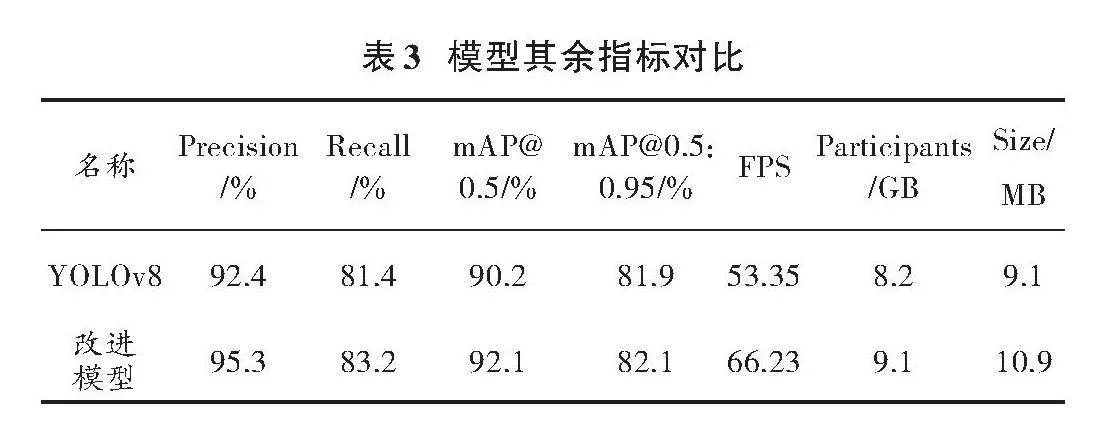
由圖3可知,在復雜背景下,原版模型置信度只有0.4、0.5,而且還有誤檢的情況,故需要對原版模型進行改進。本文引入了GAM注意力機制和GELAN結構,以替代原有的C2f結構。改進后的模型結構如圖4所示。
3.2" GAM注意力機制
GAM注意力機制是繼卷積塊注意力模塊(Convolutional Block Attention Module, CBAM)后全新的注意力模塊,是一種結合通道注意力機制和空間注意力機制的模塊,可以減少信息分散,同時放大全局維度的交互特征。通過引入全局注意力機制,模型能夠更好地理解圖像中的重要信息,從而在復雜的背景和光照條件下實現準確的交通事故嚴重程度檢測。本文將GAM全局注意力機制引入到YOLOv8模型結構的頭部,通過減少信息分散和放大全局維度的交互特征來提高模型性能和對病害的特征表達能力。GAM實現過程如圖5所示。
給定一個特征圖F1,經過兩個獨立的注意力子模塊,先通過通道注意力機制模塊對原特征圖進行校正,得到中間狀態F2;然后經過空間注意力機制模塊再次校正,得到最終特征圖F3。中間狀態變量F2和最終輸出F3公式如下:
[F2=Mc(F1)?F1]" " " " " " " (1)
[F3=Ms(F2)?F2]" " " " " " " "(2)
式中:[Mc]和[Ms]分別為通道注意力圖和空間注意力圖;“[?]”表示元素方法的乘法計算。
3.3" GELAN結構
GELAN的模塊架構如圖6所示,它結合了CSPNet梯度路徑規劃的最佳功能和ELAN的推理速度優化。
GELAN代表了一種多功能架構,它融合了這些屬性,并增強了YOLO系列算法標志性的實時推理能力。
1) RepNCSPELAN4模塊。此組件表示CSP?ELAN 的高級版本,旨在進一步簡化特征提取過程。該模塊將初始卷積層的輸入拆分為兩條路徑,通過一系列 RepNCSP和卷積層處理每條路徑,然后將它們合并。這種雙路徑策略促進了高效的梯度流和特征重用,顯著地提高了模型的學習效率和推理速度。
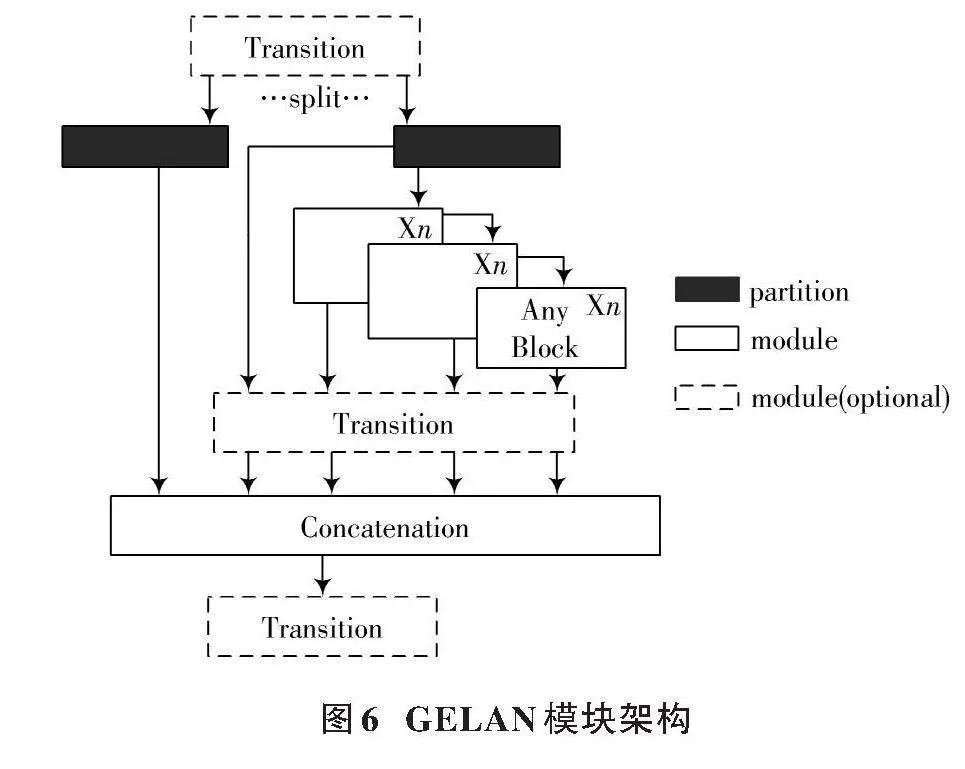
2) SPPELAN模塊。本文介紹了一種通過在ELAN結構中合并空間金字塔池化(SPP)來實現層聚合的方法,即SPPELAN模塊,其具體結構如圖7所示。它從調整通道維度的卷積層開始,然后是一系列空間池化操作,以捕獲多尺度上下文信息。輸出被連接并傳遞到另一個卷積層以整合特征,從而優化網絡從各種空間層次結構中提取詳細特征的能力。
4" 實驗與結果
4.1" 實驗準備階段
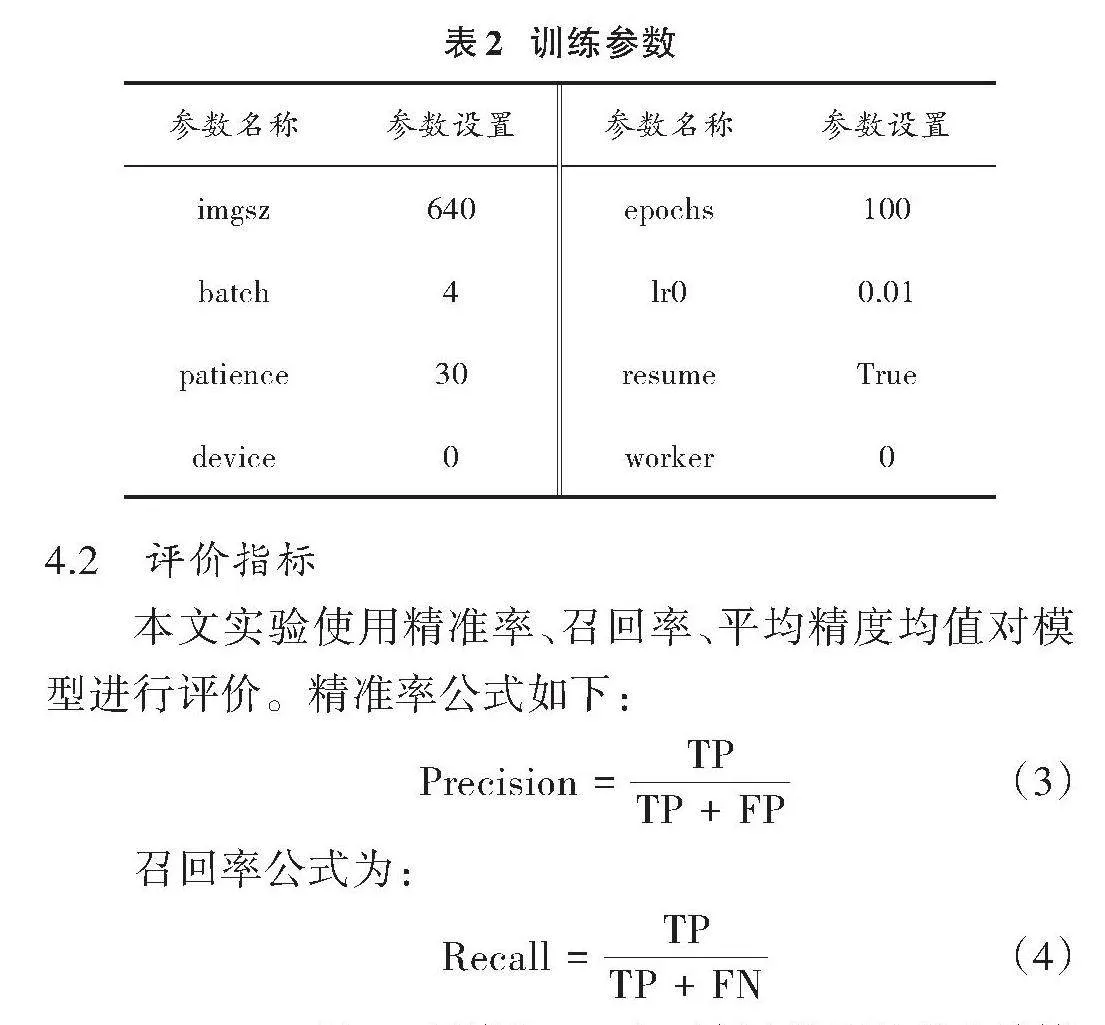
操作系統為Windows 10;硬件GPU為NVIDIA GeForce GTX 1050 Ti, 4096 MiB,內存為16 GB;環境配置為Python 3.8,CUDA v11.8,PyTorch 2.1.1。訓練參數設置如表2所示。
4.2" 評價指標
本文實驗使用精準率、召回率、平均精度均值對模型進行評價。精準率公式如下:
[Precision=TPTP+FP]" " " " " " "(3)
召回率公式為:
[Recall=TPTP+FN]" " " " " " " " (4)
mAP@0.5指IoU閾值為0.5時,對每個類別的樣本計算精準率,然后取這些精準率的平均值。而mAP@0.5:0.95表示在不同IoU閾值范圍(0.5~0.95,步長為0.05),計算的是平均mAP值。對于每個IoU閾值,計算每個類別的精準率?召回率曲線,并計算該曲線下的平均精度均值,然后將所有IoU閾值下的平均精度均值取平均,得到mAP@0.5:0.95的值。
4.3" 對比及驗證
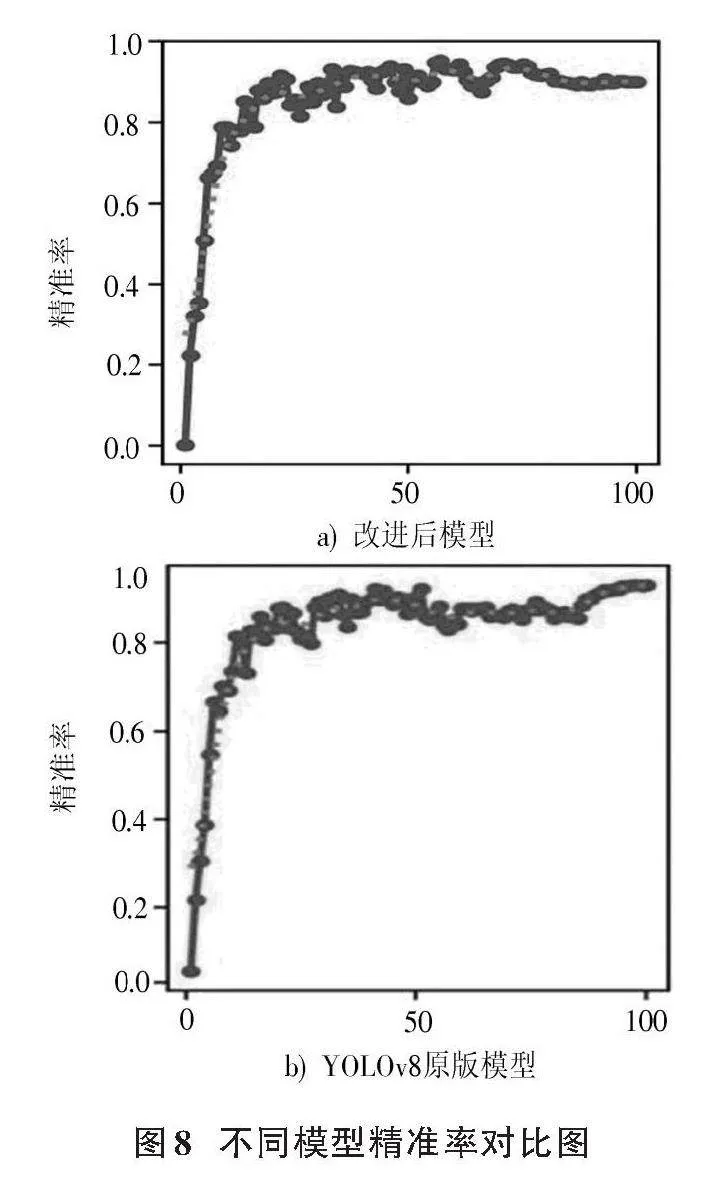
通過比較原版模型與改進模型來驗證模型的精準率,結果如圖8所示,圖8a)為改進后的精準率,圖8b)為YOLOv8原版模型。由圖可知,改進后的YOLOv8?GELAN?GAM模型精準度更高,對于圖像的識別更加精準,能夠較為明顯地捕捉到碰撞后位置變化小的車輛或者形變量較小的事故車輛,可為后續的應急救援提供更為全面的信息。
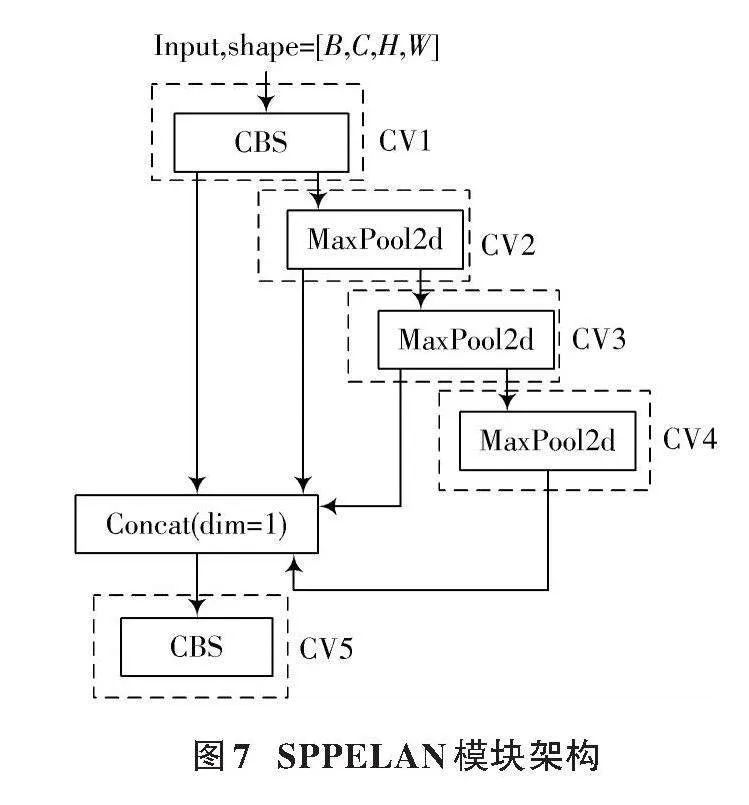
模型其余指標對比如表3所示。
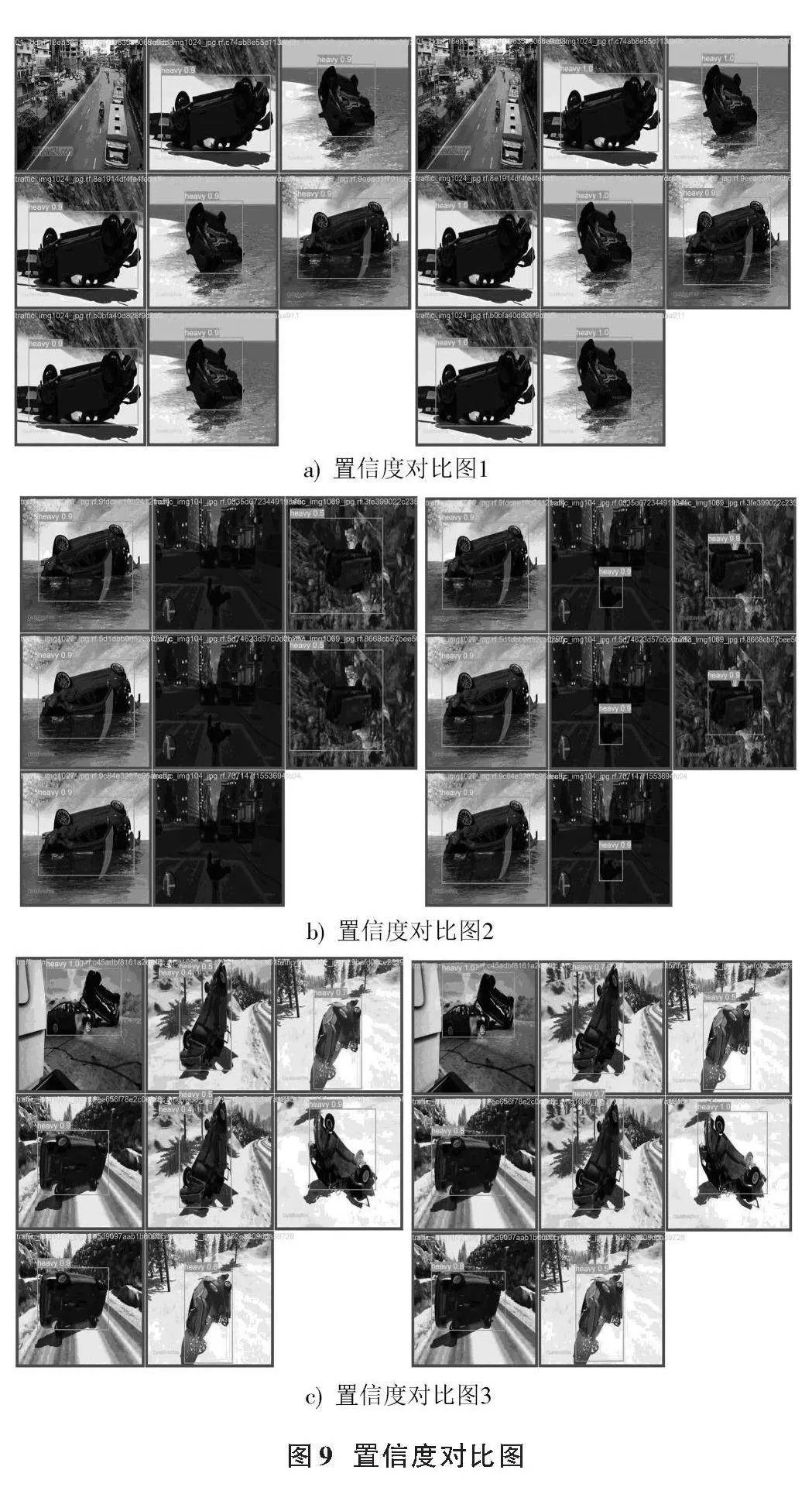
YOLOv8?GELAN?GAM模型的精準率較原模型有顯著提升。經過驗證集進行直觀對比可以分析出,本文模型能夠判定出原版模型所檢測不出的檢測對象,對于易混淆的目標檢測更加準確。模型置信度對比圖如圖9所示。圖9a)中,在同樣面對轎車翻車的情況,YOLOv8原模型置信度為0.9,而改進后的YOLOv8?GELAN?GAM模型的置信度可以達到1,換而言之,改進后的模型準確度更高。
而如圖9b)和圖9c)中所示,YOLOv8原模型對于背景亮度較暗以及處在山坡上等有復雜背景的情況,會出現漏檢以及將背景中的石頭等突出物檢測為出現交通事故的情況;改進后的YOLOv8?GELAN?GAM模型則可以避免出現這種情況。
5" 結" 語
本文針對復雜交通環境下的交通事故嚴重程度檢測速度慢的問題,基于YOLOv8框架進行了改進,引入了GAM注意力機制,以及將C2f網絡結構替換為GELAN網絡結構,旨在實現模型的輕量化與性能提升。基于這些改進所得出的結論如下。
1) 通過RepNCSPELAN4模塊代替全部的C2f模塊,以及將池化層由SPPF模塊替換為SPPELAN模塊,模型的參數量及大小得到了顯著減小,這不僅降低了模型的計算復雜度,還提高了實時檢測的效率。
2) 引入GAM注意力機制,有效提升了模型的特征融合能力。通過模擬人類視覺的注意力機制,模型能夠更加專注于圖像中的關鍵信息,從而提高交通事故嚴重程度檢測的準確率。
通過實驗結果的對比分析可以發現,基于YOLOv8?GELAN?GAM的交通事故嚴重程度檢測模型在多個方面均表現出優越的性能。與原始YOLOv8模型相比,改進后的模型在準確率、mAP@0.5、Recall等關鍵指標上分別提升了2.9%、1.9%、1.8%,同時模型的參數量和大小也得到了顯著降低,而且置信度以及復雜情況下的準確率也得到了提升。
注:本文通訊作者為唐陽山。
參考文獻
[1] SHEIKH M S, LIANG J, WANG W. An improved automatic traffic incident detection technique using a vehicle to infrastructure communication [J]. Journal of advanced transportation, 2020(10): 1?14.
[2] ELHATRI C, TAHIFA M, BOUMHIDI J. Extreme learning machine?based traffic incidents detection with domain adaptation transfer learning [J]. Journal of intelligent systems, 2017, 26(4): 601?612.
[3] 蔣紅亮.基于深度學習的共享電動汽車碰撞檢測與預警研究[D].南京:東南大學,2018.
[4] 汪霜霜.稀疏學習城市交通視頻異常事件檢測算法的研究[D].柳州:廣西科技大學,2019.
[5] ELHATRI C, BOUMHIDI J. Fuzzy deep learning based urban traffic incident detection [J]. Cognitive systems research, 2018, 50: 206?213.
[6] YU Y, XU M, GU J. Vision?based traffic accident detection using sparse spatio?temporal features and weighted extreme learning machine [J]. IET intelligent transport systems, 2019, 13(9): 1417?1428.
[7] JIANG H, DENG H. Traffic incident detection method based on factor analysis and weighted random forest [J]. IEEE access, 2020, 8: 168394?168404.
[8] GAO S, LI W, HAO D, et al. Traffic incident detection based on the width characteristic of the moving object marker [J]. International journal of information and communication technology, 2020, 16(4): 285?296.
[9] LIANG H, SONG H, YUN X, et al. Traffic incident detection based on a global trajectory spatiotemporal map [J]. Complex amp; intelligent systems, 2022, 8(2): 1389?1408.
[10] TAO Z M, LI Y B, WANG P C, et al. Traffic incident detection based on mmwave radar and improvement using fusion with camera [J]. Journal of advanced transportation, 2022(2022): 1.1?1.15.
[11] 王卓.基于視覺顯著性的交通事件檢測算法研究[D].西安:長安大學,2018.
[12] 高新聞,沈卓,許國耀,等.基于多目標跟蹤的交通異常事件檢測[J].計算機應用研究,2021,38(6):1879?1883.
[13] 吳蘭,趙自廣,文成林.基于YOLOv3算法的交通事故檢測[J].現代電子技術,2022,45(7):181?186.
[14] 金媛媛,劉明劍,牛浩驊,等.基于交叉路口碰撞概率的車輛碰撞預警方法研究[J].科技創新與應用,2022,12(9):7?12.
作者簡介:唐梓峰(1999—),男,遼寧沈陽人,碩士研究生,研究方向為智能駕駛汽車與網聯控制。
唐陽山(1972—),男,滿族,遼寧鞍山人,博士研究生,教授,研究方向為交通安全與車路協同控制技術。
潘迪敬(2000—),男,山東菏澤人,碩士研究生,研究方向為智能交通管理。
宋東明(2000—),男,遼寧鞍山人,碩士研究生,研究方向為交通大數據分析與建模。
趙會鵬(1998—),男,天津人,碩士研究生,研究方向為環境感知與汽車智能駕駛。
DOI:10.16652/j.issn.1004?373x.2024.20.019
引用格式:唐梓峰,唐陽山,潘迪敬,等.基于無人機的交通事故嚴重程度檢測[J].現代電子技術,2024,47(20):123?128.
收稿日期:2024?04?24" " " " " "修回日期:2024?05?27
基金項目:遼寧省教育廳2023基本科研項目:基于BDS/UAV的道路應急救援目標智能識別與路徑規劃研究(JYTMS20230842)
