智能力量訓練器的電磁配重負載關鍵技術分析
2024-10-28 00:00:00葉圣華張涵馬紹輝劉福國
汽車與新動力 2024年7期
摘要:針對傳統力量訓練器材配重負載存在的諸多問題,研究一種適用于家庭和辦公室,的智能力量訓練器,提出基于輪轂式外轉子永磁無刷直流電機的配重負載系統,并解決其關鍵技術問題。該系統具有高順滑體感、力度無極調節、高功率密度、低噪聲等特點,且體積小、方便拆卸,具有較高的產業化可能性和市場競爭力。
關鍵詞:智能力量訓練器;無刷直流電機;電磁配重負載
0 前言
田麥久認為力量素質是人體維持運動的根本素質,無論對于運動員還是普通人群都至關重要。對于運動員而言,力量素質直接決定了其運動過程中技術動作的速度、幅度和運動耐力,是取得優異成績的基礎保障;對于普通人群而言,力量素質有助于保持身體健康,減少骨關節疾病的發生,特別是對長期久坐的人群喝中老年人益處頗多[1]。
力量訓練對于運動員和普通群體力量素質的提升有著顯著效果,人們通過外部器械輔助等增加自身的肌肉力量,提高身體協調性,同時帶動關節進行鍛煉,顯著減少關節疾病的發生。相對于球類運動,力量訓練能避免與他人沖撞或扭傷的危險。與跑步相比,力量訓練不會對膝關節造成沖擊和震蕩損傷。在如今全民互聯網時代,互聯網會占據了人們生活的大部分時間,且生活節奏加快,越來越多人處于亞健康狀態;但是他們又很難抽出時間進行戶外或外出運動。相比之下,力量訓練損傷風險更小,時間成本上更具優勢。
目前,市面上大部分現有力量訓練器仍然采用配重塊作為配重負載,這是最原始的阻力源,為廣大健身愛好者服務[2];也有一些大型的力量訓練器采用液壓、齒輪減速箱、伺服等作為阻力源系統,在不同程度上實現了力量無級可調及訓練過程數字化,但這些訓練器體積龐大,不適用于家庭和辦公室,也無法便攜地安裝和拆卸[3]。
本文提出一種全新的基于輪轂式外轉子永磁無刷直流電機力量訓練器的配重負載系統(以下簡稱電磁配重負載系統),該系統具有高順滑體感、力度無極調節,高功率密度、低噪聲等特點。采用該電磁配重負載系統的智能力量訓練器體積小、方便拆卸,極適用于家庭和辦公室,填補了市場的空白。
1 電磁配重負載系統的構造
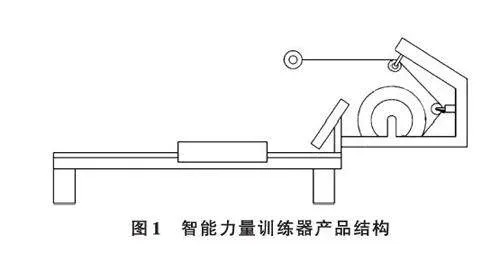
該電磁配重負載系統包括支架、拉力索、電機、驅動模塊和控制單元等。其中,電機為輪轂式外轉子永磁無刷直流電機,包含固定安裝在健身器支架上的定子和套接在定子上且可相對定子旋轉的外轉子。拉力索一端與電機的外轉子相連,另一端與力量驅動機構連接;驅動機構通過拉力索帶動電機的外轉子旋轉從而產生拉力。控制單元通過驅動模塊控制電機反方向旋轉,并使其產生與拉力相對的負載力,實現力量訓練恒力矩的往復運動。智能力量訓練器產品結構如圖1 所示。
2 電磁配重負載系統的關鍵性技術問題
輪轂式外轉子永磁無刷電機具有扭矩密度大、轉動慣量大、力的轉換效率高、噪聲小等特點,無需變速傳動機構,直接輸出可調力矩。但將輪轂式外轉子永磁無刷電機應用在力量訓練的健身器上,仍需要解決諸如電機脈動、電機狀態不停切換等現實問題。
2. 1 電磁力矩脈動現象明顯
無刷直流電動機的定子繞組按一定順序換流,由于各相繞組存在電感,會對電流的瞬時變化產生阻礙作用,因此每經過一個磁狀態,繞組的電流從某一相切換到另一相時,將會引發電磁轉矩的脈動[4-5]。傳統車用輪轂式電機驅動器通常采用讀取霍爾信號或檢測懸浮相的感應電動勢來判斷電機轉子所在扇區,進而決定逆變橋臂的開關邏輯。在高速行駛時,因換相帶來的力矩脈動不易被感覺[6]。然而,在力量訓練中,電機處于低速、停止,甚至是倒發電的狀態,力矩脈動現象會非常明顯。電機力矩的脈動會引起電機抖動,不僅降低輸出效率,還會導致使用體驗感下降。
2. 2 電機狀態切換頻繁
在力量訓練的過程中,電機會在低速、停止、倒發電的狀態中不斷切換。然而,經典比例-積分-微分(PID)控制器采用線性組合的形式產生的控制量,相同的控制量顯然無法滿足力量訓練電機在前進、停止、倒退、加速等全過程中不同場景的實際應用[7-8]。
2. 3 設定力與實際輸出力之間存在偏差
電磁配重負載系統在使用的過程中可以通過用戶界面設定系統輸出不同的力,但在設定力與實際輸出力之間存在較大的偏差。
3 電磁配重負載關鍵性技術問題的解決方案
3. 1 電磁力矩脈動現象明顯的解決方案
使用空間矢量脈寬調制(SVPWM)的驅動控制方法,由三相功率逆變器的6 個功率開關元件組成的特定開關模式產生的脈寬調制波,能夠使輸出電流波形盡可能接近于理想的正弦波形。正弦波驅動根據外轉子的旋轉角度,以正弦的形式連續改變定子線圈的電壓,從而使轉子旋轉輸出設定力矩。因此,外轉子的旋轉角度檢測精度對換相時輸出力矩產生的脈動以及電機輸出的效率至關重要。通過合理利用磁編碼傳感器,使輪轂式電機精確采集電角度,并結合空間SVPWM 算法輸出恒定力矩。
3. 1. 1 基于復矢量的電角度動態補償技術
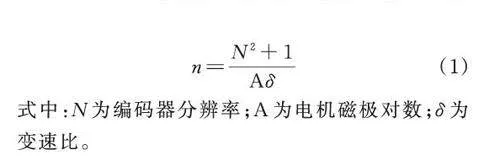
輪轂式外轉子無刷直流電機控制采用SVPWM 算法。精確的矢量控制需要實時獲取電機轉子的電角度,但由于外轉子無刷直流電機的結構特殊性,無法在電機軸上直接安裝旋轉編碼器。因此,需要設計電磁式編碼傳感器的安裝機構。計算電機端360° 電角度對應編碼器脈沖數n 的公式為[9]:
在獲取電角度的同時,采集到當前SVPWM 輸A 相占空比Ta,當Ta由正值向負值穿越時獲取此時的電角度θerror,數值大小標幺化,1.0 對應電角度360°。根據其數值的大小是否大于0.5 來求取不同的電角度補償值θcom,再折算為編碼器補償數值,將其補償到下一個電角度周期內獲得的編碼器原始數值上,確保占空比Ta與相電流同相位。
3. 1. 2 基于SVPWM 的正弦驅動技術
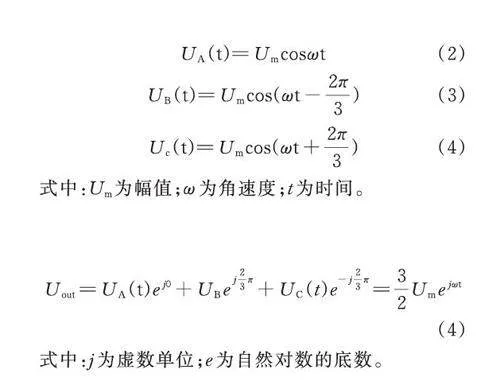
SVPWM 算法通過空間矢量的調制方式形成一個近似圓形的磁場,根據電壓合成矢量所在扇區確定基本空間矢量的作用時間,進而控制整流橋內開關管的工作狀態,得到理想的正弦輸出波形。假設有三相對稱正弦電壓(頻率相同、幅值相等、相位互差120°)UA(t)、UB(t)、UC(t),表達式如下[10]:
為了減少控制難度,將這三個正弦電壓合成為一個空間矢量Uout,合成關系為:
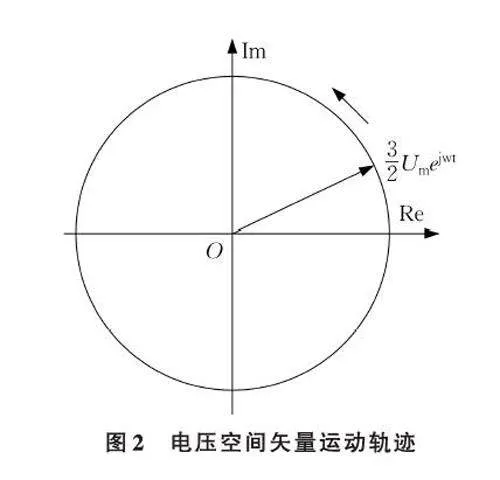
將三相對稱正弦電壓轉化成了一個合成電壓空間矢量,它的運動軌跡如圖2 所示,是一個旋轉電壓矢量,以角速度ω 逆時針勻速旋轉,頂點運動軌跡為一個圓。這意味著對三相正弦對稱電壓的控制等效于對電壓空間矢量的控制,而且該電壓空間矢量的軌跡越接近圓,原三相電壓就越接近三相對稱正弦波。
3. 2 電機狀態切換頻繁問題的解決方案
利用非線性PID 加前饋控制的低壓大電流控制技術滿足力量訓練電機處于前進、停止、倒退、加速等全過程中不同場景的實際應用。與傳統控制器相比,非線性前饋PID 控制器需要確定更多的參數。主要包括跟蹤微分器中的r 和h(r 表示速度因子,h 表示濾波因子),KP、KI、KD(KP 表示比例增益,KI 表示積分增益,KD 表示微分增益)等參數,其中r決定跟蹤微分器的跟蹤速度,h 影響控制系統的濾波效果。適當增大r 和h 能夠提高系統的自適應性及魯棒性。然而,過大的r 和h 也會使跟蹤信號產生超調和振蕩。帶寬w 和r 之間的關系如下[11]:
r 的近似值可通過公式r = w2 /1.142 進行計算。通常,確定參數近似值后,再通過仿真進行調節,參數r 和h 的關系如下:
采用仿真調試的方法實現非線性組合中的參數整定,大量的仿真計算表明,在非線性函數中,α 決定了控制量的品質,通常α∈(0.5,1.0),β 一般與采樣時間有關,取值應適當小。
KP、KI、KD通常根據經驗設為定值,并向閉環控制系統中添加干擾,觀察過渡過程的輸出波形。如果波形不理想,則按照比例、積分和微分的順序反復調整KP、KI、KD,直到獲得滿意的控制效果。
3. 3 設定力與實際輸出力之間存在偏差的解決方案
通過用戶界面可設定系統輸出不同的力時,在未標定前,設定力與實際輸出力會存在偏差。該電磁配重負載系統采用一種輸出力的標定方法,運用不同大小的拉力進行測試0TtWIs7B4zEiBQtokkcdHg5ABZ8Sc3tnyaUycuEBnKQ=,以覆蓋輸出拉力從小到大的范圍,從而建立準確的拉力和摩擦力模型。通過獲得不同大小的輸出力數據,進行輸出力的標定和補償,最終根據這些數據計算出準確的輸出力,使偏差滿足相應標準,以確保輸出力的準確度,并實現配重無極化調控。
4 結論
本文提出了智能力量訓練器電磁配重負載系統,并解決其關鍵技術問題。通過研發樣品試驗,得出以下結論:
(1) 合理利用磁編碼傳感器使輪轂式電機精確地采集電角度,再結合SVPWM 算法可以根據用戶需求輸出恒定力矩,有效解決了無刷直流電機應用在智能力量訓練器中引發的電磁脈動的現象,提升了智能力量訓練器的順滑體感。
(2) 非線性PID 加前饋控制的低壓大電流控制技術結合了傳統的PID 控制和前饋控制方法,可以滿足力量訓練電機處于前進、停止、倒退、加速等全過程中不同場景的實際應用,提高了系統的精確性、穩定性、魯棒性及自適應能力,有效解決了智能力量訓練器電機狀態切換頻繁的問題。
(3) 該系統利用一種輸出力的標定方法使得用戶設定力與輸出力之間的偏差始終滿足標準要求。
隨著健康理念的深入與完善,人們對于高品質的健身器械的需求越來越迫切。本文研究的智能力量訓練器為適用多種力量訓練運動健身器材的動力總成,實現高順滑的體感、力度無極調節、高功率密度及低噪聲的用戶體驗。本產品的研發成果轉換并產業化的可能性非常高,企業一旦投產成功,填補了市場空白,極具市場競爭力。
參 考 文 獻
[ 1 ] 王艷艷. 力量型健身器材數據采集與監管系統的研究[D]. 濟南:山東建筑大學,2018.
[ 2 ] 陳松坤. 一種新型數字力量健身器的研制[D].武漢:武漢體育學院,2016.
[0TtWIs7B4zEiBQtokkcdHg5ABZ8Sc3tnyaUycuEBnKQ= 3 ] 嚴立,鄭偉濤,張慶國,等. 液壓智能型游泳等動力量測試訓練器的研制[J]. 武漢體育學院學報,1998(2):82-86.
[ 4 ] 魏松. 基于交流伺服的健身器材負載控制系統研究[D]. 濟南:山東建筑大學,2015.
[ 5 ] 季宏祥. 基于磁控阻力健身車精確功率控制系統的設計[J]. 自動化應用,2021(10):167-172
[ 6 ] 于營波. 適用于健身器的自發電及電磁阻尼控制系統的設計[D]. 青島:青島科技大學,2020.
[ 7 ] 馮振東. 健身車用永磁同步電機死區補償方法研究[D]. 西安:長安大學,2020.
[ 8 ] 孫大鵬. 基于恒功率健身車的心肺耐力測試系統的設計與實現[D]. 合肥:安徽大學,2017.
[ 9 ] 張健滔. 基于振動力量訓練的新型健身器材開發研究[D]. 合肥:合肥工業大學,2005.
[10] XIE L H,YIN C R,LAI W Y,et al.Polyfluorenebased semiconductors combined with periodic table elements for organic electronics[J].Progress in Polymer Science,2012,37(9):1192-1264.
[11] DELAUGERRE C, FLANDRE P, CHAIX M L,et al.Protease inhibitor resistance analysis in the MONARK trial comparing first-line lopinavirritonavir monotherapy to lopinavir-ritonavir plus zidovudine and lamivudine triple therapy. [J].Antimicrobial Agents & Chemotherapy, 2009,53(7):2934-2939.