多BTT導彈滾轉通道姿態約束下的固定時間姿態協調控制
2024-11-23 00:00:00胡子晅周佳玲王利楠孫佳月溫廣輝
系統工程與電子技術 2024年6期




摘要: 針對多傾斜轉彎(bank-to-turn, BTT)導彈在姿態約束下的滾轉通道一致性安全控制問題,提出一種分布式固定時間姿態協調控制器。BTT 導彈氣動參數變化強烈、對機動要求高,對控制器提出了響應速度快、抗干擾能力強、且需滿足姿態受限約束等要求。針對上述問題,基于固定時間控制技術、障礙Lyapunov函數,結合多智能體系統協調控制理論,對多枚BTT導彈滾轉通道提出一種分布式固定時間姿態協調控制律。在所提協調控制律下,所有BTT導彈的滾轉角可在固定時間一致收斂至給定的參考指令信號,且在控制過程中滿足姿態約束條件。仿真結果表明了所提方法的有效性。
關鍵詞: 多枚傾斜轉彎導彈; 滾轉通道; 固定時間控制; 狀態約束; 協調控制
中圖分類號: TP 13
文獻標志碼: A
DOI:10.12305/j.issn.1001-506X.2024.06.24
Fixed-time coordinated attitude control for roll channels of multiple BTT missiles with attitude constraints
HU Zixuan1, ZHOU Jialing1, WANG Linan2, SUN Jiayue3, WEN Guanghui1,2,*
(1. MIIT Key Laboratory of Complex-field Intelligent Exploration, Beijing Institute of Technology, Beijing 100081, China; 2. Department of Systems Science School of Mathematics, Southeast University, Nanjing 211189, China; 3. State Key Laboratory of Synthetical Automation for Process Industries, Northeastern University, Shenyang 110819, China)
Abstract: In view of the consensus safe control problem for roll channels of multiple bank-to-turn (BTT) missiles under attitude constraints, a distributed fixed-time attitude-coordination controller is proposed. Due to the significant variation in aerodynamic parameters and high maneuvering requirements of BTT missiles, as well as practical constraints on missile attitudes, the controller is required to have high response speed and strong ability of disturbance rejection. Within this context, a distributed fixed-time attitude coordination control law for the roll channels of multiple BTT missiles is proposed, which utilizes the fixed-time control technology, barrier Lyapunov function technology, and coordinated control theory of multi-agent systems. Under this coordination control law, the roll angles of all BTT missiles converge consistently to a given reference command signal within a fixed time and in the meanwhile satisfy the attitude constraints during the whole control course. Simulation results demonstrate the effectiveness of the proposed method.
Keywords: multiple bank-to-turn (BTT) missiles; roll channels; fixed-time control; state constraint; coordination control
0 引 言
近年來,多導彈協同作戰受到廣泛關注[1-2]。多導彈協同作戰旨在通過彈間信息交互,實現導彈群在毀傷層面的配合,從而更有效地完成多樣化的戰術任務[3]。多彈協同作戰在分布式防御[4]、空中分布式作戰[5-6]、分布式反艦作戰[7]等作戰模式中可以迅速構建殺傷鏈/殺傷網,生成殺傷效能。
許多導彈系統采用了傾斜轉彎(bank-to-turn, BTT)技術來增強導彈系統的機動性和攻擊的精度,稱為BTT導彈[8]。對于BTT導彈而言,深入研究其滾轉通道的控制系統尤為重要。BTT導彈通過控制其滾轉通道,使其最大升力面迅速調整至所需方向,并控制其俯仰通道,使其在最大升力面內產生所需過載,以此實現快速機動。BTT導彈滾轉通道的動力學模型可建模為時變二階線性模型[9],存在未知時變不確定性,導致BTT導彈滾轉協調控制律設計困難。為此,不少文獻提出針對單BTT導彈滾轉通道的控制設計方案[9-14],文獻[15-16]提出針對多個BTT導彈滾轉通道自動駕駛儀設計姿態協調控制律,采用有限時間控制技術提高了系統的動態品質。
固定時間控制技術[17-18]作為有限時間控制技術的改進方法,具有更快的收斂速度和與系統初始條件無關的收斂時間,是一種契合多導彈協同控制快速響應需求的控制技術。目前,固定時間控制技術被廣泛應用于協同控制任務[19-24]。此外,在實際系統中,系統狀態受到實際系統限制要求。以導彈系統為例,過大的姿態角度會導致導彈飛行失穩。設計狀態約束下的系統控制器是近年來研究的熱點問題之一。為此,學者們提出一系列控制設計方法,其中基于障礙Lyapunov函數(barrier Lyapunov functions, BLF)的控制器設計方法備受關注,如基于對數 BLF[25-27]、基于正切BLF[28-29]、基于積分BLF[30-31]等。然而,由于這些控制方法需要獲取多BTT導彈系統的全局信息,無法有效解決多個BTT導彈滾轉通道系統的受限姿態協調控制問題。
本文針對多BTT導彈滾轉通道姿態約束下的固定時間姿態協調控制問題,采用反步法,基于多智能體一致性協調控制理論,設計了一種新型多BTT導彈滾轉通道協調控制律。該項技術能夠滿足多導彈協同控制對快速性、安全性等的需求。相比于已有結果,本文的創新點主要有:
(1) 基于多智能體理論設計了一種新的BLF,并利用新的基于鄰居規則的BLF設計虛擬角速度。利用BLF理論嚴格證明所有BTT導彈在控制過程中滿足約束條件。
(2) 提出基于固定時間控制方法和增加冪次積分技術[32]的多BTT導彈滾轉通道協調控制律,克服了采用反步法設計固定時間控制器會產生奇異性的缺點。與文獻[15-16]使用的有限時間控制技術相比,本文使用的固定時間控制技術可保證所有導彈在固定時間內實現滾轉角一致到達參考指令信號,且收斂時間與系統初始條件無關。
本文的結構如下:第1節介紹相關的知識、引理,并介紹BTT導彈滾轉通道數學模型和控制問題;第2節給出固定時間協調控制器并證明系統的穩定性;第3節展示仿真結果;第4節給出結論。
1 問題描述及預備知識
3 數值仿真
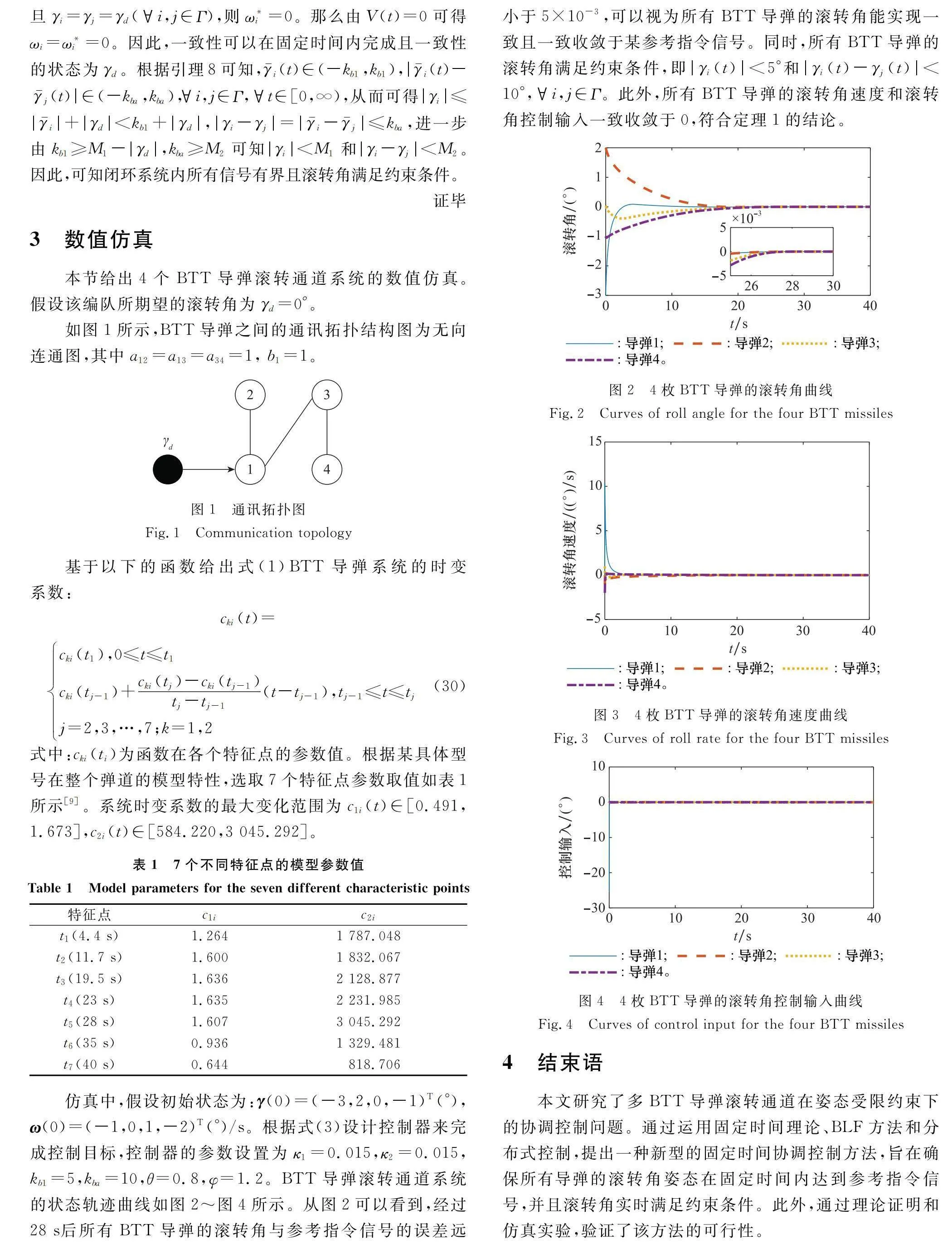
本節給出4個BTT導彈滾轉通道系統的數值仿真。假設該編隊所期望的滾轉角為γd=0°。
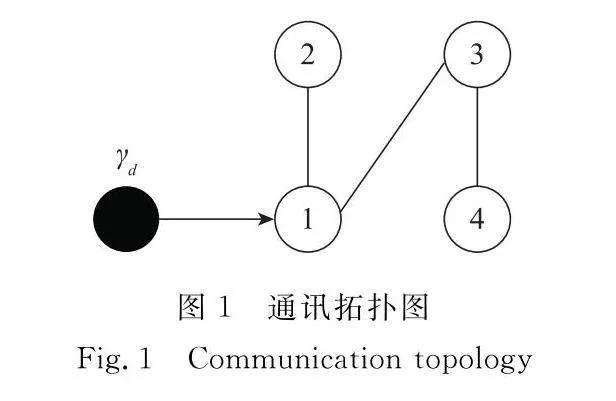
如圖1所示,BTT導彈之間的通訊拓撲結構圖為無向連通圖,其中a12=a13=a34=1, b1=1。
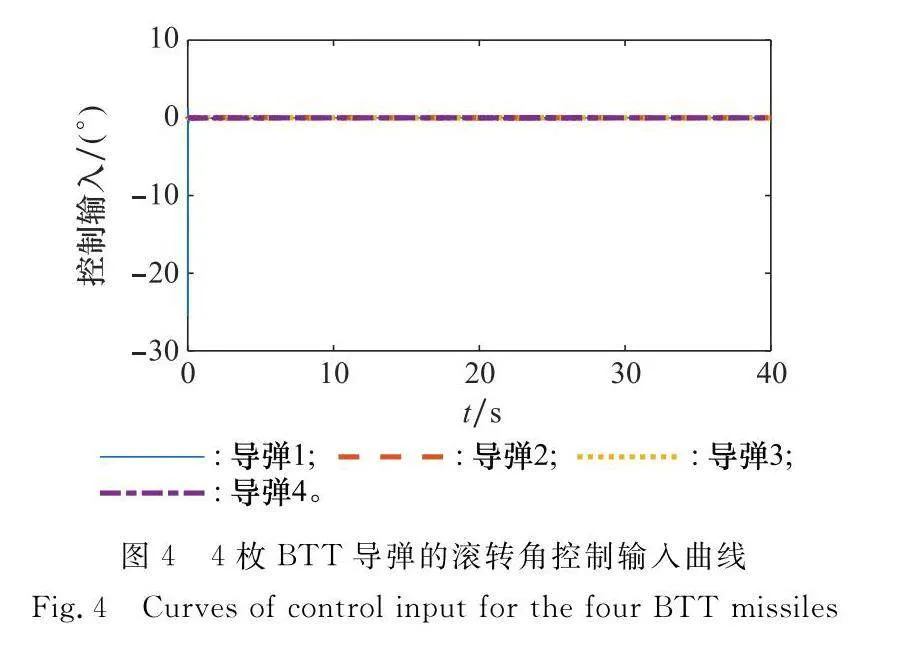
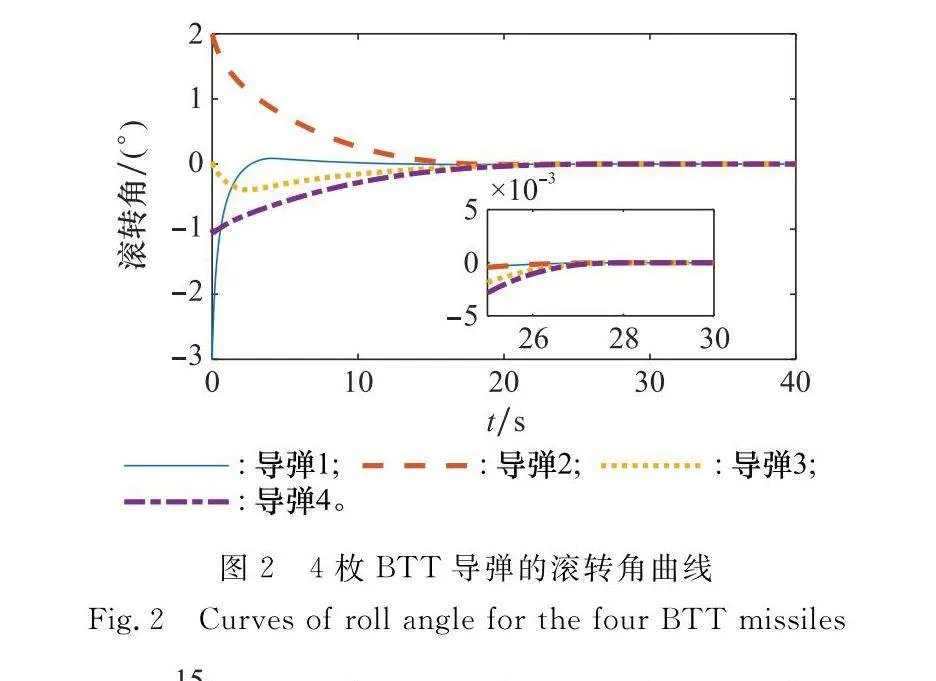
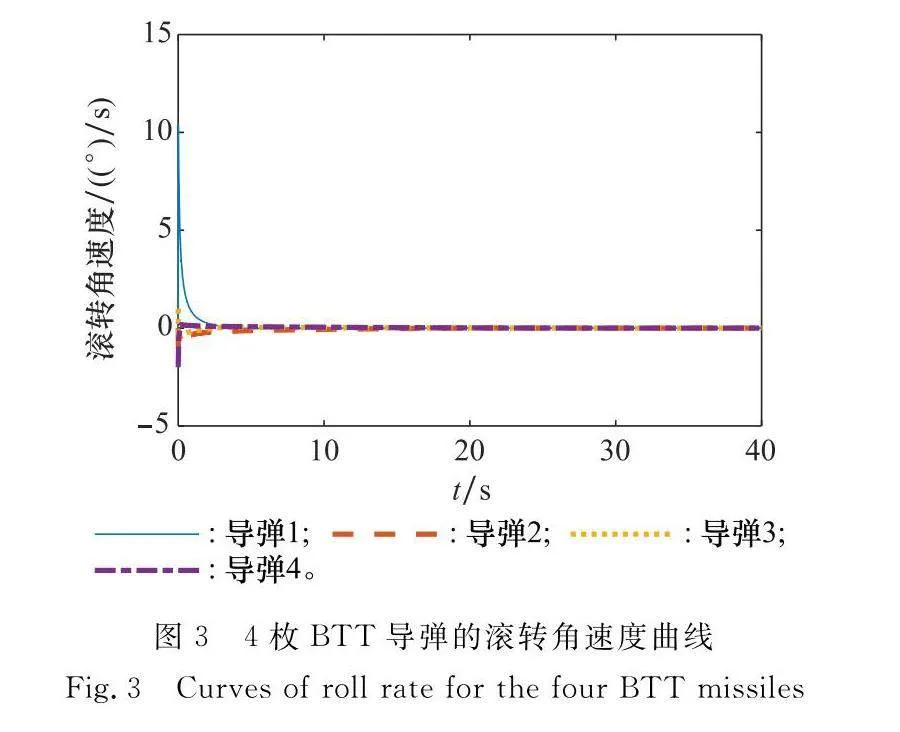
仿真中,假設初始狀態為:γ(0)=(-3,2,0,-1)T(°),ω(0)=(-1,0,1,-2)T(°)/s。根據式(3)設計控制器來完成控制目標,控制器的參數設置為κ1=0.015,κ2=0.015,kb1=5,kba=10,θ=0.8,φ=1.2。BTT導彈滾轉通道系統的狀態軌跡曲線如圖2~圖4所示。從圖2可以看到,經過28 s后所有BTT導彈的滾轉角與參考指令信號的誤差遠小于5×10-3,可以視為所有BTT導彈的滾轉角能實現一致且一致收斂于某參考指令信號。同時,所有BTT導彈的滾轉角滿足約束條件,即|γi(t)|lt;5°和|γi(t)-γj(t)|lt;10°,?i,j∈Γ。此外,所有BTT導彈的滾轉角速度和滾轉角控制輸入一致收斂于0,符合定理1的結論。
4 結束語
本文研究了多BTT導彈滾轉通道在姿態受限約束下的協調控制問題。通過運用固定時間理論、BLF方法和分布式控制,提出一種新型的固定時間協調控制方法,旨在確保所有導彈的滾轉角姿態在固定時間內達到參考指令信號,并且滾轉角實時滿足約束條件。此外,通過理論證明和仿真實驗,驗證了該方法的可行性。
參考文獻
[1]ZHOU J L, WU X J, LYU Y Z, et al. Recent progress on the study of multi-vehicle coordination in cooperative attack and defense: an overview[J]. Asian Journal of Control, 2022, 24(2): 794-809.
[2]溫廣輝, 周佳玲, 呂躍祖, 等. 多導彈協同作戰中的分布式協調控制問題[J]. 指揮與控制學報, 2021, 7(2): 137-145.
WEN G H, ZHOU J L, LYU Y Z, et al. Distributed coordination control in multi-missile cooperative tasks[J]. Journal of Command and Control, 2021, 7(2): 137-145.
[3]肖增博, 雷虎民, 夏訓輝. 多導彈協同作戰關鍵技術研究與展望[J]. 飛航導彈, 2008(6): 24-26, 50.
XIAO Z B, LEI H M, XIA X H. Research and prospect on key technologies of multi-missile cooperative operation[J]. Winged Missiles Journal, 2008(6): 24-26, 50.
[4]槐澤鵬, 梁雪超, 王洪波, 等. 多彈協同及其智能化發展研究[J]. 戰術導彈技術, 2019(5): 77-85.
HUAI Z P, LIANG X C, WANG H B, et al. Research on multi-missile collaborative and its intelligence development[J]. Tactical Missile Technology, 2019(5): 77-85.
[5]楊斌. 空中分布式作戰概念及關鍵技術分析[J]. 電訊技術, 2022, 62(6): 826-835.
YANG B. Concepts and key technology analysis for air distributed operations[J]. Telecommunication Engineering, 2022, 62(6): 826-835.
[6]宋琛, 張蓬蓬. 分布式協同對未來制空作戰的影響[J]. 飛航導彈, 2019(11): 8-11.
SONG C, ZHANG P P. Influence of distributed cooperation on future air defense operations[J]. Aerodynamic Missile Journal, 2019(11): 8-11.
[7]曾家有, 謝宇鵬. 分布式反艦作戰特點及裝備發展分析[J]. 戰術導彈技術, 2020(4): 183-188.
ZENG J Y, XIE Y P. Characteristics and equipment development on distributed anti-ship combat[J]. Tactical Missile Technology, 2020(4): 183-188.
[8]朱志剛, 周鳳岐. BTT導彈滾動通道變結構最終滑態控制系統設計[J]. 西北工業大學學報, 1995(2): 292-297.
ZHU Z G, ZHOU F Q. On design of variable structure terminal sliding mode control system for roll channel of BTT missile[J]. Journal of Northwestern Polytechnical University, 1995(2): 292-297.
[9]段廣仁, 周凈揚. BTT導彈滾動通道自動駕駛儀設計[J]. 黑龍江大學自然科學學報, 2005, 22(5): 561-565, 569.
DUAN G R, ZHOU J Y. Autopilot design of roll channel for BTT missiles[J]. Journal of Natural Science of Heilongjiang University, 2005, 22(5): 561-565, 569.
[10]湯柏濤, 董斌, 于云峰. BTT導彈滾轉通道模型參考變結構自動駕駛儀設計[J]. 計算機測量與控制, 2011, 19(1): 105-107.
TANG B T, DONG B, YU Y F. Autopilot design for BTT missile based on model reference variable structure control[J]. Computer Measurement amp; Control, 2011, 19(1): 105-107.
[11]LI S, YANG J. Robust autopilot design for bank-to-turn missiles using disturbance observers[J]. IEEE Trans.on Aerospace and Electronic Systems, 2013, 49(1): 558-579.
[12]XU X Y, CUI X X, YU W B, et al. Design of missile roll autopilot based on linear extended state observer[C]∥Proc.of the IEEE 34th Chinese Control and Decision Conference, 2022: 418-421.
[13]于秀萍, 官英雙. 基于H∞控制理論的BTT導彈自動駕駛儀設計[J]. 系統工程與電子技術, 2008, 30(5): 905-908.
YU X P, GUAN Y S. Design of autopilot for BTT missile based on H∞ control theory[J]. Systems Engineering and Electronics, 2008, 30(5): 905-908.
[14]DING X M, HU Y P, JIA R L, et al. A novel disturbance rejection control of roll channel for small air-to-surface missiles[J]. Applied Sciences, 2023, 13(1): 389.
[15]都海波, 李世華. 多BTT導彈滾動通道的有限時間姿態協調控制[C]∥IEEE第三十一屆中國控制會議, 2012: 445-450.
DU H B, LI S H. Finite-time attitude cooperative control for roll channels of multiple BTT missiles[C]∥Proc.of the IEEE 31st Chinese Control Conference, 2012: 445-450.
[16]都海波, 李世華, 何怡剛, 等. 多枚傾斜轉彎導彈的滾轉通道之分布式有限時間姿態協調控制[J]. 控制理論與應用, 2013, 30(8): 956-963.
DU H B, LI S H, HE Y G, et al. Distributed finite-time attitude cooperative control for roll channels of multiple bank-to-turn missiles[J]. Control Theory amp; Applications, 2013, 30(8): 956-963.
[17]POLYAKOV A. Nonlinear feedback design for fixed-time stabilization of linear control systems[J]. IEEE Trans.on Automatic Control, 2012, 57(8): 2106-2110.
[18]董澤洪, 李穎暉, 呂茂隆, 等. 考慮輸入受限的高超聲速飛行器非奇異固定時間自適應切換控制[J]. 系統工程與電子技術, 2023, 45(5): 1476-1488.
DONG Z H, LI Y H, LYU M L, et al. Singularity-free fixed-time adaptive switching control for hypersonic flight vehicle with input constraints[J]. Systems Engineering and Electro-nics, 2023, 45(5): 1476-1488.
[19]ZHOU N, CHENG X D, SUN Z Q, et al. Fixed-time cooperative behavioral control for networked autonomous agents with second-order nonlinear dynamics[J]. IEEE Trans.on Cyberne-tics, 2022, 52(9): 9504-9518.
[20]XIN S, SHI M, LI W, et al. Distributed fixed-time bipartite containment control of multi-agent systems with unknown disturbances[C]∥Proc.of the 7th International Conference on Control, Robotics and Cybernetics, 2022: 69-73.
[21]HU D, ZHANG S, ZOU A M. Velocity-free fixed-time attitude cooperative control for spacecraft formations under directed graphs[J]. International Journal of Robust and Nonlinear Control, 2021, 31(8): 2905-2927.
[22]HONG H F, WANG H. Fixed-time formation control for se-cond-order disturbed multi-agent systems under directed graph[J]. Symmetry, 2021, 13(12): 2295.
[23]白嘉琪, 王彥愷, 邢昊. 無人艇與四旋翼無人機固定時間異構編隊控制[J]. 系統工程與電子技術, 2023, 45(4): 1152-1163.
BAI J Q, WANG Y K, XING H. Fixed-time heterogeneous formation control of unmanned boats and quadrotor unmanned aerial vehicle[J]. Systems Engineering and Electronics, 2023, 45(4): 1152-1163.
[24]符小衛, 陳子浩. 多無人機協同探測快速目標的控制方法設計[J]. 系統工程與電子技術, 2021, 43(11): 3295-3304.
FU X W, CHEN Z H. Design of control method for multi-UAV cooperative detection of fast target[J]. Systems Engineering and Electronics, 2021, 43(11): 3295-3304.
[25]LIU L, LIU Y J, TONG S. Fuzzy-based multierror constraint control for switched nonlinear systems and its applications[J]. IEEE Trans.on Fuzzy Systems, 2019, 27(8): 1519-1531.
[26]LI D P, LIU Y J, TONG S C, et al. Neural networks-based adaptive control for nonlinear state constrained systems with input delay[J]. IEEE Trans.on Cybernetics, 2019, 49(4): 1249-1258.
[27]梁樂成, 趙斌, 周軍, 等. 部分約束下空中目標攔截制導控制一體化方法[J]. 系統工程與電子技術, 2023, 45(4): 1134-1143.
LIANG L C, ZHAO B, ZHOU J, et al. Integrated guidance and control method against aerial target with partial constraints[J]. Systems Engineering and Electronics, 2023, 45(4): 1134-1143.
[28]CHEN A Q, TANG L, LIU Y J, et al. Adaptive control for switched uncertain nonlinear systems with time-varying output constraint and input saturation[J]. International Journal of Adaptive Control and Signal Processing, 2019, 33(9): 1344-1358.
[29]WANG C X, WU Y Q. Finite-time tracking control for strict-feedback nonlinear systems with full state constraints[J]. International Journal of Control, 2019, 92(6): 1426-1433.
[30]ZHAO W, LIU Y J, LIU L. Observer-based adaptive fuzzy tracking control using integral barrier Lyapunov functionals for a nonlinear system with full state constraints[J]. IEEE-CAA Journal of Automatica Sinica, 2021, 8(3): 617-627.
[31]YUAN F, LIU Y J, LIU L, et al. Adaptive neural consensus tracking control for nonlinear multiagent systems using integral barrier Lyapunov functionals[J]. IEEE Trans.on Neural Networks and Learning Systems, 2023, 34(8): 4544-4554.
[32]QIAN C J, LIN W. A continuous feedback approach to global strong stabilization of nonlinear systems[J]. IEEE Trans.on Automatic Control, 2001, 46(7): 1061-1079.
[33]HARDY G H, LITTLEWOOD J E, POLYA G. Inequalities[M]. Cambridge: Cambridge University Press, 1952.
[34]ZOU A M, DE RUITER A H J, KUMAR K D. Distributed finite-time velocity-free attitude coordination control for spacecraft formations[J]. Automatica, 2016, 67: 46-53.
[35]ZOU A M, KUMAR K D, DE RUITER A H J. Fixed-time attitude tracking control for rigid spacecraft[J]. Automatica, 2020, 113: 108792.
[36]HONG Y G, HU J P, GAO L X. Tracking control for multi-agent consensus with an active leader and variable topology[J]. Automatica, 2006, 42(7): 1177-1182.
[37]PENG T K. Adaptive control of uncertain constrained nonlinear systems[D]. Singapore: National University of Singapore, 2008.
作者簡介
胡子晅(1998—),男,碩士研究生,主要研究方向為多智能體固定時間控制。
周佳玲(1991—),女,副教授,博士,主要研究方向為協同制導與控制、群智協同控制與優化。
王利楠(1996—),男,博士研究生,主要研究方向為非線性控制、分布式非光滑控制。
孫佳月(1990—),女,教授,博士,主要研究方向為隨機系統的魯棒與容錯控制、分布式協同控制。
溫廣輝(1983—),男,教授,博士,主要研究方向為分布式控制理論與控制工程、自主智能系統分析與控制。
