
基于網聯信號燈的綠燈暢行導航系統設計
2022-10-18 08:10:42石勝海眭愛欣劉建江陳益威譚絲月
時代汽車 2022年19期
石勝海 眭愛欣 劉建江 陳益威 譚絲月
西華大學 四川省成都市 610039
1 研究背景
車路信號燈協同技術隨著通信技術的發展而不斷改進,在提高道路通行效率、保障車輛安全行駛、實現交通節能減排以及提高用戶駕駛體驗等方面帶來機遇。
國內外對特種車輛實現綠燈暢行和社會車輛綠波通行有眾多研究。陳紀龍等通過一種用于應急情況下的交通信號燈改變裝置,解決了緊急車輛通過道路交叉口時,獨立控制信號燈處于紅燈的問題;田芳等通過一種緊急車輛綠燈暢行系統,實現身份識別、轉向信號傳遞以及獨立控制信號燈信號的轉變,但均需人工操作,較為不便。劉晨希等通過一種緊急車輛引導系統設計,為緊急車輛規劃最佳路線,提高目標車輛到達目的地的效率,但沒有討論信號燈和道路擁堵等情況。荊彬彬等提出了適用于雙周期的干道綠波信號協調控制模型,有效地減少了車輛的停車次數與平均延誤時間。
本文從宏觀切入,考慮信號燈主動配合特種車輛,在現有綠波研究上做出擴展,考慮次路的通行能力,協調區域車流分布,為駕駛員和行人推送信號燈信息,實現社會全局效率最優。
2 系統構成及工作流程
該系統由導航終端、中央控制處理中心、信號燈控制系統三部分組成。
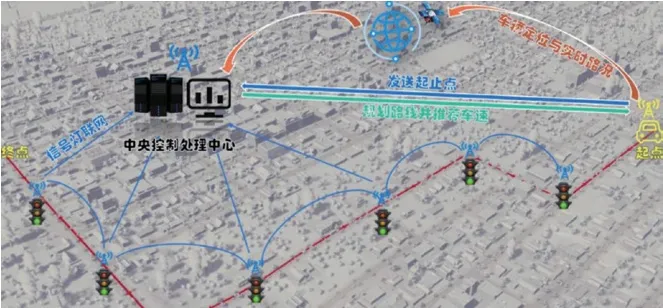
圖1 系統構成
導航終端為帶有定位功能并搭載導航軟件的設備,顯示導航路徑、前方路況、路口信號燈紅燈倒計時等信息。中央控制處理中心按相關判定邏輯發出信號燈控制指令、計算社會車輛推薦車速。信號燈控制系統接收并實施中央控制處理中心的指令。
中央控制處理中心通過各道路的交通情況,建立數學模型,得出道路擁堵指數。
特種車輛出發時,系統規劃距目的地路程最短的路徑。中央控制處理中心綜合該特種車輛運動情況、實時路況和信號燈的實時狀態,對該路徑實施動態的信號燈配時策略。此時特種車輛、中央控制處理中心、信號燈三者聯動,信號燈根據中央控制處理中心提供的特種車輛實時狀態做出相應的“應答”。
信號燈在特種車輛與路口仍有一段距離時變為綠燈,導航上顯示行駛方向綠燈的倒計時,便于駕駛員根據實際情況行駛,確保特種車輛順暢通過路口,實現一路綠燈暢行。
第一步:中央控制處理中心獲知特種車輛起止點,并基于目前交通情況自動規劃一條到達目的地的最優(時間最短或者距離最短)路徑;
第二步:中央控制處理中心將最優路徑中信號燈組加入到優化系統中;
第三步:導航終端實時將定位數據發給中央控制處理中心,中央控制處理中心通過判斷車輛與前方信號燈實時位置和前方實時交通情況,優化信號燈的相位時間,實現直接直行或者轉彎通過該交叉口;
第四步:中央控制處理中心重復第三步,直到目標特種車輛到達目的地;
第五步:在目標特種車輛到達目的地過程中,中央控制處理中心可以根據道路具體情況,調整路徑,隨時根據最新路徑,調整納入控制的信號燈組。
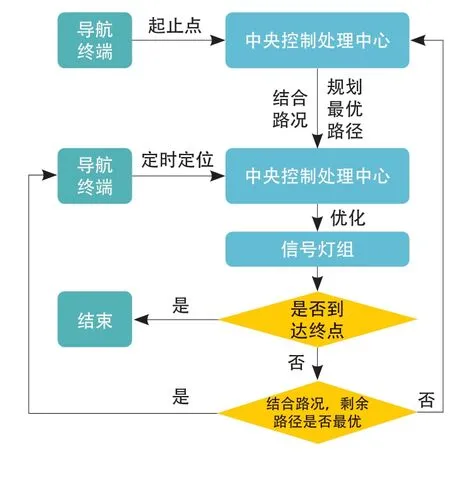
圖2 工作流程
3 系統控制方式
3.1 單個特種車輛暢行
當特種車輛通過上一路口進入下一路段時,以道路實時擁堵指數和特種車輛的暢行速度預測特種車輛到達下一路口時行駛相位是否為紅燈。
3.1.1 特種車輛行駛相位為紅燈
若為紅燈,且在特種車輛前方存在排隊的社會車輛,則只有等待前方排隊車輛全部散去,特種車輛才能通行,此時需比較疏散特種車輛前方的社會車輛所需時間與特種車輛的暢行時間:

式(1)中,為集結波與疏散波的相遇時間,為排隊長度,為路段通行能力達到時的行車速度,為堵點解除后到車隊消散前回升的通行能力。式(2)中,為特種車輛的暢行速度,即特種車輛的自由流車速,為車輛與下一路口的距離。
①=:理想條件下,即為特種車輛通過信號燈路口的最小時間,故在=時,存在理想臨界狀態,即社會車輛剛好疏通時特種車輛也隨即通過信號燈,此時,特種車輛沖突相位綠燈變黃燈,黃燈閃爍后變紅燈,特種車輛行駛相位紅燈變綠燈。直至特種車輛通過,信號燈恢復正常。
②>:理論上來說路口排隊車輛可以在特種車輛還未到達路口時自行疏散,但無法保證特種車輛能無減速地通過信號燈路口。為了給司機充分的反應時間,在信號燈變化之前,會提示特種車輛行駛相位倒計時:

本系統假設黃燈時間為3秒,故沖突相位倒計時為(-3)秒,倒計時結束后,沖突相位的綠燈變為黃燈,黃燈閃爍后變紅燈;特種車輛行駛相位倒計時即為,倒計時結束后,紅燈變綠燈。直至特種車輛通過,信號燈恢復正常。
③<:此時為嚴重交通擁堵,故在特種車輛剛進入路段時,沖突相位綠燈馬上變黃燈,黃燈閃爍后變紅燈,特種車輛行駛相位紅燈變綠燈。直至特種車輛通過,信號燈恢復正常。
3.1.2 特種車輛行駛相位為綠燈
定義參數:車輛行駛相位綠燈剩余時間。
①>:即在剩余綠燈時間內特種車輛能夠安全且無須等待地穿過交叉口,不對信號控制做任何變化。
②<:即在剩余綠燈時間內特種車輛無法通過交叉口。此時需要啟動綠燈延長方案。理論上綠燈延長時間Δt可表示為:

故在特種車輛行駛相位延長綠燈時間,沖突相位延長紅燈時間,倒計時顯示延長時間。待特種車輛通過后,特種車輛行駛相位綠燈變為黃燈,黃燈閃爍后變紅燈,此時沖突相位紅燈變綠燈,信號燈恢復正常。
3.2 多個特種車輛暢行
3.2.1 同方向行駛的特種車隊
基于單個特種車輛綠燈行駛機制下,對于同向行駛的特種車隊,只需要確保在綠燈的狀態下,特種車隊的最后一輛車通過即可。
3.2.2 沖突方向行駛的特種車輛
為特種車輛進行路徑規劃時,盡量避免了同一時間出現沖突的可能。但一旦出現特種車輛行至路口發生沖突,雙方信號燈都會呈現黃燈狀態,相位沖突會對交通造成很大影響,此時應及時預警中央控制處理中心進行人工干預。
4 其他運用
本系統也適用于新手、有“路怒癥”的駕駛員以及行人。
4.1 在社會車輛中的運用
系統可規劃紅燈最少路徑和時間最短路徑,導航終端顯示下一路口實時倒計時、綠燈暢行速度范圍及附近正在執行任務的特種車輛。
對于每條道路,中央控制處理中心通過由道路實時擁堵指數得出的路段平均車速,計算出通過該路段的時間:

式(5)中為起始地至目的地的路程;td為社會車輛等候綠燈時間。
系統同時考慮主干路與非主干路的通行能力,先用最短路算法得出條(<10)路徑,再加入信號燈因素,比較條路徑的總時間,繼而得出時間最短路徑。
計算綠燈暢行速度范圍需考慮該路段道路擁堵情況:
圖3中,T為下一信號燈綠燈的第m個周期(與此刻間隔最短的綠燈周期視為第1周期)起始時刻;T為終止時刻;T為社會車輛以道路最高限速行駛X的時間。
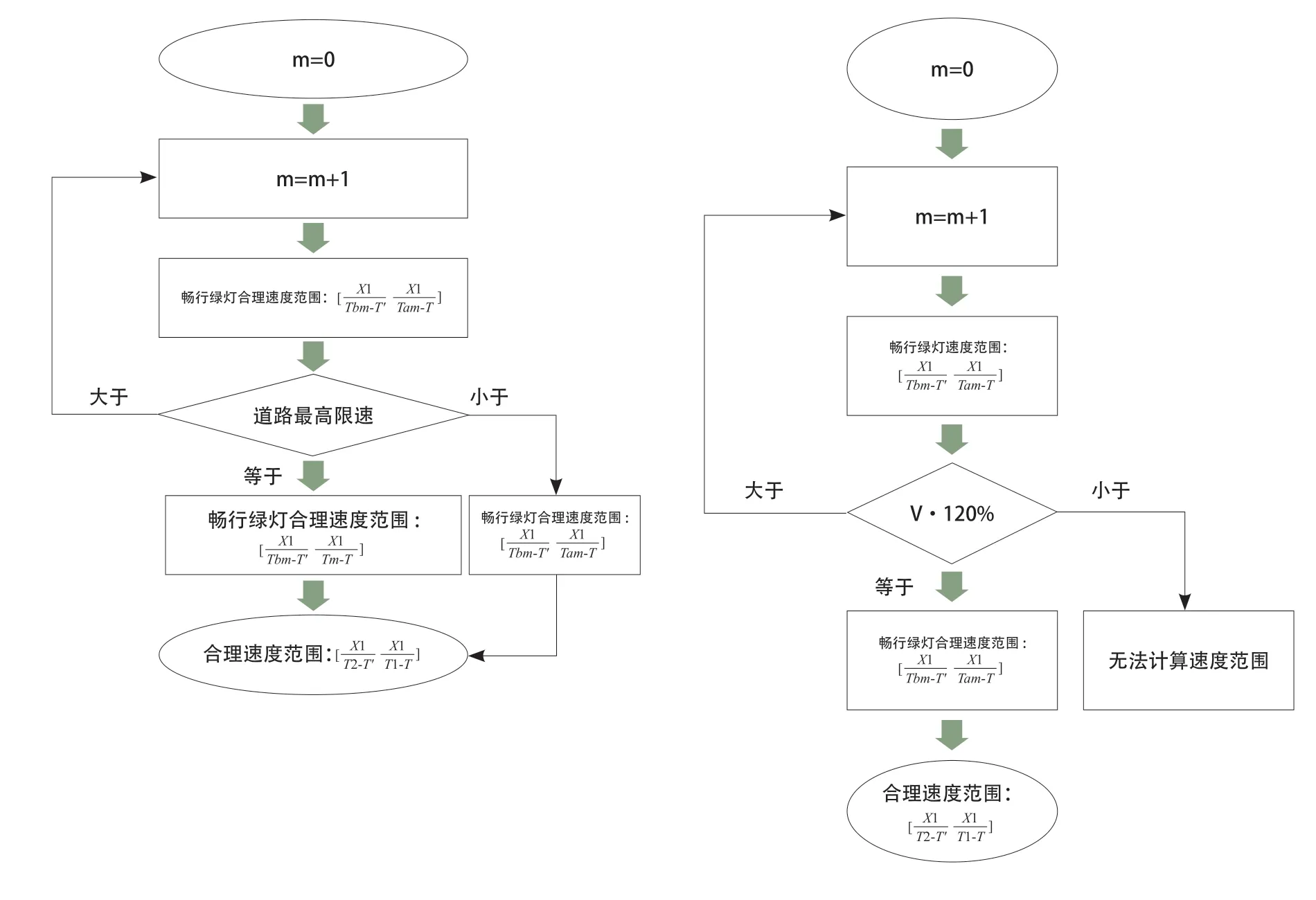
圖3 社會車輛暢行速度邏輯:左為道路暢通情況,右為道路擁堵情況
為防止效果退化,需長期優化該暢行速度范圍。
4.2 在行人中的運用
行人打開導航可以知道附近所有信號燈的實時狀態,隨之加快或放慢步伐,做到“心中有數”;對于視障人士,系統可通過語音規劃路徑,并播報路口信號燈倒計時,做到安全出行。
5 結語
該系統設計在現有信號燈系統的基礎上,將車、路、信號燈聯動,提高了道路設施利用率,建立了更為智能化的交通體系。該系統設計不僅能使特種車輛安全快速地到達目的地,降低事故發生率。還能應用于社會車輛和行人,提高通行效率和車輛燃油經濟性,緩解出行焦慮。
