
高速公路機電設備智能監測系統設計
2024-12-04 00:00:00樊吉飛
中國新技術新產品 2024年10期
關鍵詞:高速公路
摘 要:本文針對高速公路機電設備的智能監測需求,設計了一套智能監測系統。該系統基于FPGA主控芯片,結合STM32模塊對設備狀態信息進行多種傳感器數據采集,實時監測機電設備的運行狀態,提前預警可能出現的故障,并提供有效維護和保養建議。利用該系統可以提高機電設備的可靠性和運行效率,減少維護成本和降低交通事故的發生率。
關鍵詞:高速公路;機電設備;智能監測
中圖分類號:U 41" 文獻標志碼:A
隨著高速公路的不斷發展和擴建,機電設備在保障交通安全和保證順暢運行方面發揮重要作用[1]。然而,機電設備的故障和損壞可能會導致交通事故和道路擁堵,給交通運輸帶來嚴重影響[2]。因此,設計一套智能監測系統來及時發現機電設備的異常情況,并提供有效維護和保養建議,對保障高速公路的安全性和提高運行效率具有重要意義。
1 高速公路機電設備智能監測系統硬件設計
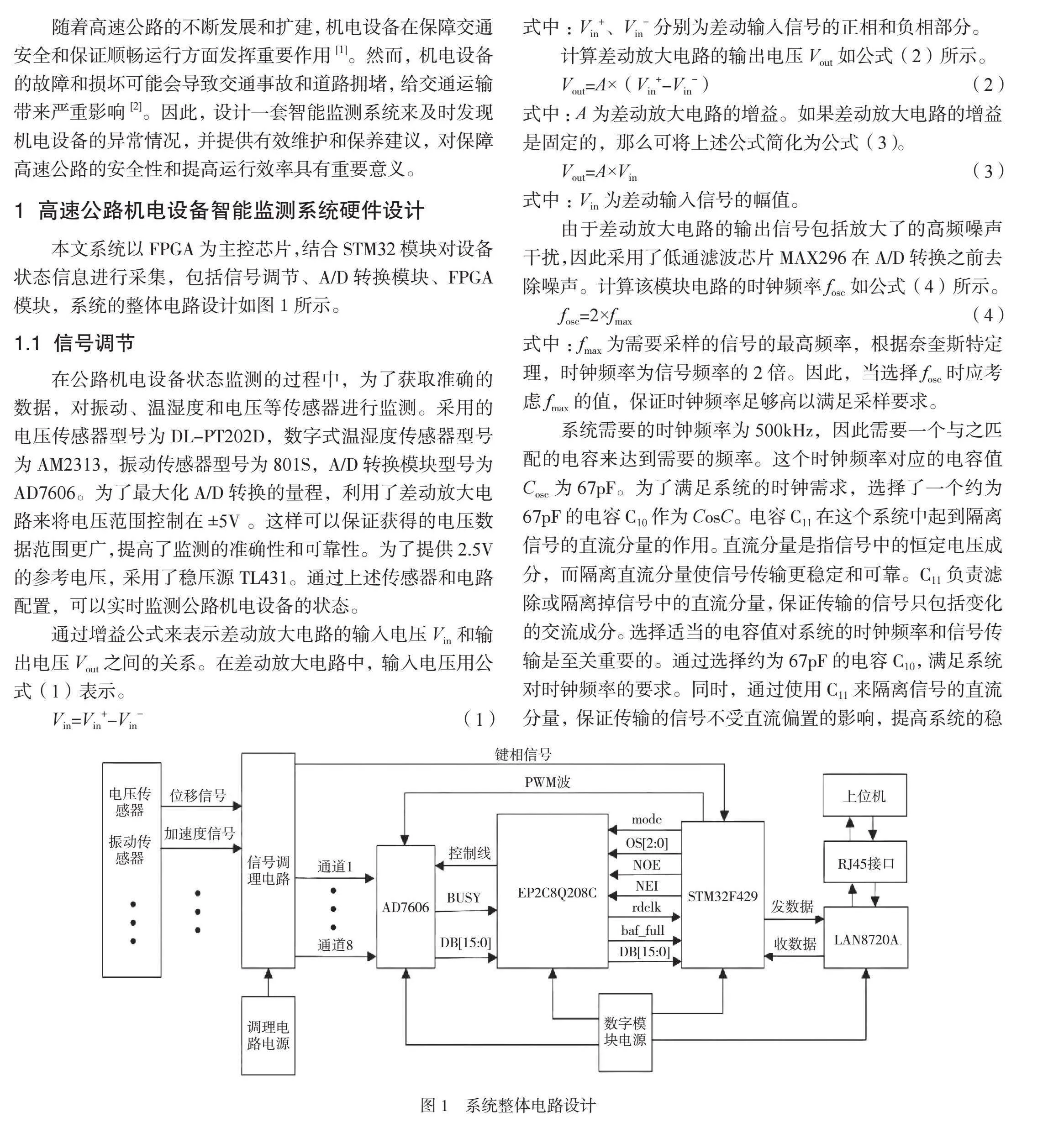
本文系統以FPGA為主控芯片,結合STM32模塊對設備狀態信息進行采集,包括信號調節、A/D轉換模塊、FPGA模塊,系統的整體電路設計如圖1所示。
1.1 信號調節
在公路機電設備狀態監測的過程中,為了獲取準確的數據,對振動、溫濕度和電壓等傳感器進行監測。采用的電壓傳感器型號為DL-PT202D,數字式溫濕度傳感器型號為AM2313,振動傳感器型號為801S,A/D轉換模塊型號為AD7606。為了最大化A/D轉換的量程,利用了差動放大電路來將電壓范圍控制在±5V 。這樣可以保證獲得的電壓數據范圍更廣,提高了監測的準確性和可靠性。為了提供2.5V的參考電壓,采用了穩壓源TL431。通過上述傳感器和電路配置,可以實時監測公路機電設備的狀態。
通過增益公式來表示差動放大電路的輸入電壓Vin和輸出電壓Vout之間的關系。在差動放大電路中,輸入電壓用公式(1)表示。
Vin=Vin+-Vin-" " (1)
式中:Vin+、Vin-分別為差動輸入信號的正相和負相部分。
計算差動放大電路的輸出電壓Vout如公式(2)所示。
Vout=A×(Vin+-Vin-)" " (2)
式中:A為差動放大電路的增益。如果差動放大電路的增益是固定的,那么可將上述公式簡化為公式(3)。
Vout=A×Vin" (3)
式中:Vin為差動輸入信號的幅值。
由于差動放大電路的輸出信號包括放大了的高頻噪聲干擾,因此采用了低通濾波芯片MAX296在A/D轉換之前去除噪聲。計算該模塊電路的時鐘頻率fosc如公式(4)所示。
fosc=2×fmax " (4)
式中:fmax為需要采樣的信號的最高頻率,根據奈奎斯特定理,時鐘頻率為信號頻率的2倍。因此,當選擇fosc時應考慮fmax的值,保證時鐘頻率足夠高以滿足采樣要求。
系統需要的時鐘頻率為500kHz,因此需要一個與之匹配的電容來達到需要的頻率。這個時鐘頻率對應的電容值Cosc為67pF。為了滿足系統的時鐘需求,選擇了一個約為67pF的電容C10作為CosC。電容C11在這個系統中起到隔離信號的直流分量的作用。直流分量是指信號中的恒定電壓成分,而隔離直流分量使信號傳輸更穩定和可靠。C11負責濾除或隔離掉信號中的直流分量,保證傳輸的信號只包括變化的交流成分。選擇適當的電容值對系統的時鐘頻率和信號傳輸是至關重要的。通過選擇約為67pF的電容C10,滿足系統對時鐘頻率的要求。同時,通過使用C11來隔離信號的直流分量,保證傳輸的信號不受直流偏置的影響,提高系統的穩定性和可靠性。
1.2 A/D轉換模塊
AD7606是一款高性能的A/D轉換器,具有較高的分辨率和采樣精度。16位的分辨率可以將模擬信號轉換為65536個離散的數字值,提供了更高的數據精度[3]。在本文的系統中,將ADIN1~ADIN8作為信號輸入端,通過這些輸入端口同時轉換8個不同的模擬信號。另外,該芯片的信號輸入為±5V,可以適應較大范圍的信號輸入。無論是正負5V的信號還是較小的信號,都能準確地轉換為相應的數字值。為了提供一個穩定的基準電平,芯片內部的基準電壓為2.5V,以保證A/D轉換的準確性和一致性。
1.3 FPGA模塊
FPGA的外圍電路起到了重要的作用,其提供了FPGA正常工作需要的電源、時鐘和復位信號。電源模塊為FPGA提供穩定的電壓,保證其正常運行。時鐘模塊為FPGA提供準確的時鐘信號,同步其操作[4]。復位模塊用來將FPGA恢復到初始狀態,以保證系統的可靠性和穩定性。通過選擇Cyclone系列的EP2C8Q208CFPGA處理器,不僅可以滿足成本和功耗的要求,還能夠充分利用其強大的計算和邏輯處理能力。并行傳輸方式使STM32與FPGA之間的數據讀取更高效,而FIFO應用緩沖數據,可以提高系統的穩定性和數據傳輸的可靠性。
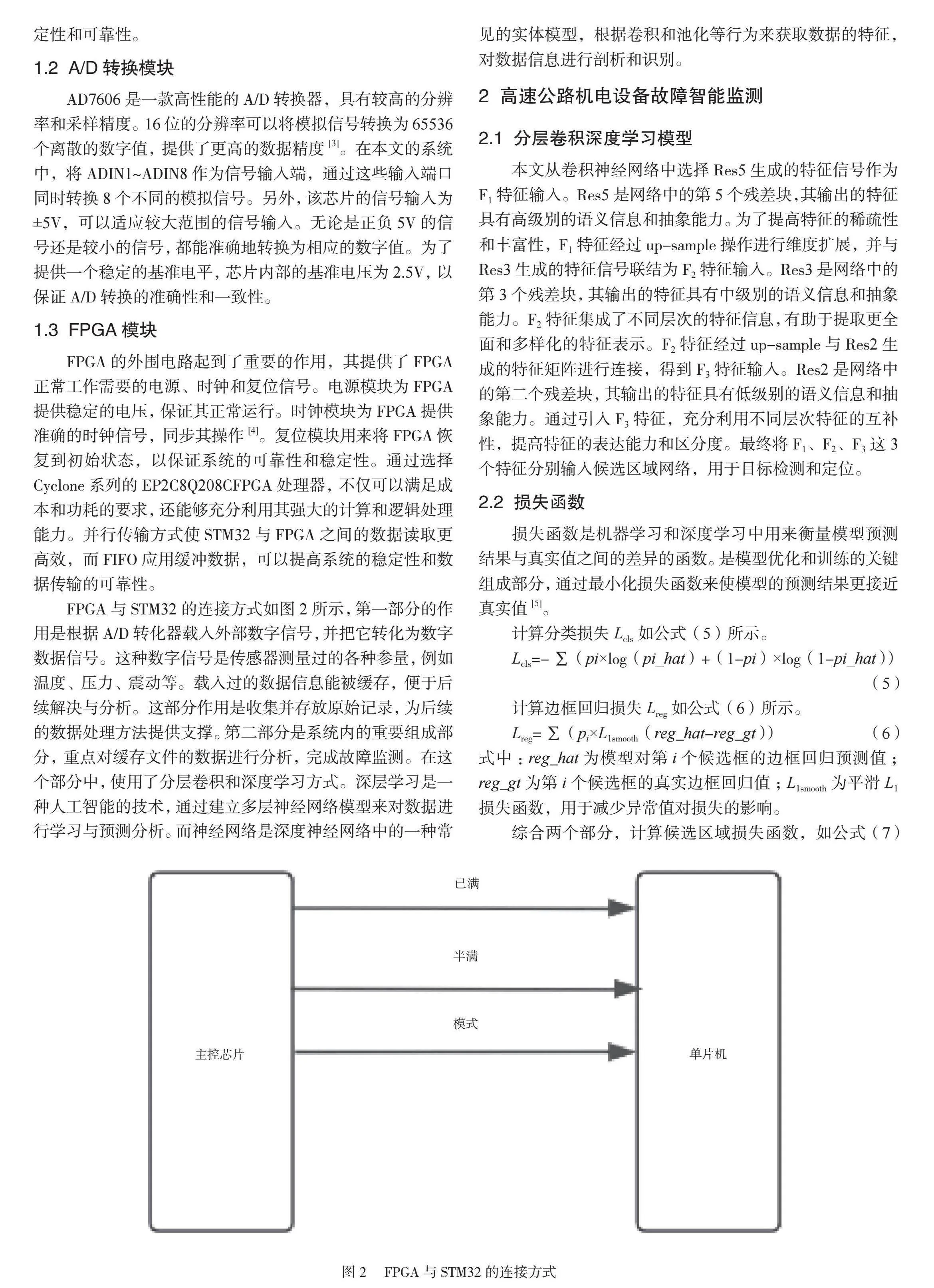
FPGA與STM32的連接方式如圖2所示,第一部分的作用是根據A/D轉化器載入外部數字信號,并把它轉化為數字數據信號。這種數字信號是傳感器測量過的各種參量,例如溫度、壓力、震動等。載入過的數據信息能被緩存,便于后續解決與分析。這部分作用是收集并存放原始記錄,為后續的數據處理方法提供支撐。第二部分是系統內的重要組成部分,重點對緩存文件的數據進行分析,完成故障監測。在這個部分中,使用了分層卷積和深度學習方式。深層學習是一種人工智能的技術,通過建立多層神經網絡模型來對數據進行學習與預測分析。而神經網絡是深度神經網絡中的一種常見的實體模型,根據卷積和池化等行為來獲取數據的特征,對數據信息進行剖析和識別。
2 高速公路機電設備故障智能監測
2.1 分層卷積深度學習模型
本文從卷積神經網絡中選擇Res5生成的特征信號作為F1特征輸入。Res5是網絡中的第5個殘差塊,其輸出的特征具有高級別的語義信息和抽象能力。為了提高特征的稀疏性和豐富性,F1特征經過up-sample操作進行維度擴展,并與Res3生成的特征信號聯結為F2特征輸入。Res3是網絡中的第3個殘差塊,其輸出的特征具有中級別的語義信息和抽象能力。F2特征集成了不同層次的特征信息,有助于提取更全面和多樣化的特征表示。F2特征經過up-sample與Res2生成的特征矩陣進行連接,得到F3特征輸入。Res2是網絡中的第二個殘差塊,其輸出的特征具有低級別的語義信息和抽象能力。通過引入F3特征,充分利用不同層次特征的互補性,提高特征的表達能力和區分度。最終將F1、F2、F3這3個特征分別輸入候選區域網絡,用于目標檢測和定位。
2.2 損失函數
損失函數是機器學習和深度學習中用來衡量模型預測結果與真實值之間的差異的函數。是模型優化和訓練的關鍵組成部分,通過最小化損失函數來使模型的預測結果更接近真實值[5]。
計算分類損失Lcls如公式(5)所示。
Lcls=-∑(pi×log(pi_hat)+(1-pi)×log(1-pi_hat)) " (5)
計算邊框回歸損失Lreg如公式(6)所示。
Lreg=∑(pi×L1smooth(reg_hat-reg_gt))" (6)
式中:reg_hat為模型對第i個候選框的邊框回歸預測值;reg_gt為第i個候選框的真實邊框回歸值;L1smooth為平滑L1損失函數,用于減少異常值對損失的影響。
綜合兩個部分,計算候選區域損失函數,如公式(7)所示。
Loss=λcls×Lcls+λreg×Lreg" (7)
式中:λcls和λreg是用于平衡分類損失和邊框回歸損失的權重參數。通過最小化候選區域損失函數,優化模型的分類和邊框回歸能力,從而提高機電設備故障檢測的準確性和魯棒性。
ti表示預測參數化候選框的坐標,通常使用smoothL1損失函數來計算,如公式(8)所示。
L(M')=∑(pi×R(ti-ti×)) " (8)
式中:回歸損失函數L(M')是用來衡量模型對機電設備邊界回歸的準確性;pi為第i個候選框為機電設備故障的概率;R為smoothL1函數;ti為模型對第i個候選框的坐標預測值;ti×為第i個候選框的真實邊界的坐標。在回歸損失函數中,采用了smoothL1函數R來計算預測坐標與真實邊界的差異。這是為了減少異常值對損失的影響。具體計算方法如公式(9)所示。
R(x)=0.5×x2,if|x|lt;1
|x|-0.5,otherwise" (9)
通過最小化分類損失函數和回歸損失函數,使模型更準確地預測候選框的分類和邊界信息,提高機電設備故障檢測的性能。
判斷機電設備故障的監測網絡模型的總體損失函數如公式(10)所示。
L(M,M')=L(M)+L(M') " (10)
式中:M為模型對機電設備故障的分類損失函數;M'為模型對機電設備邊界的回歸損失函數。
將分類損失函數和回歸損失函數相加,得到了總體損失函數L(M,M')。通過最小化總體損失函數,優化模型的分類和邊界回歸能力,提高機電設備故障檢測的準確性和魯棒性。
3 試驗結果
3.1 通信測試
經過使用Altera公司的QuartusII軟件進行邏輯分析,對FPGA是否成功讀取A/D模塊數據進行了驗證。在驗證過程中,前兩個通道的參考電壓分別設置為2.5V和1.2V,第三個通道接地,其余通道懸空未連接任何電源。對各通道的電壓值進行了計算,并發現其電壓值幾乎等于其對應的參考電壓。
在A/D交換的過程中,數字信號被轉化為數據信號,再由FPGA進行載入與處理。驗證成功每個通道電流值,確定FPGA正常載入了A/D模塊數據信息,而且成功將數字信號轉化為數字數據信號,這個結論對保證系統的正常運行至關重要。根據FPGA的數據讀取和處理功能,掌握傳感器測量過的各種數值,并用于后續數據處理和故障監測。
3.2 故障監測實例
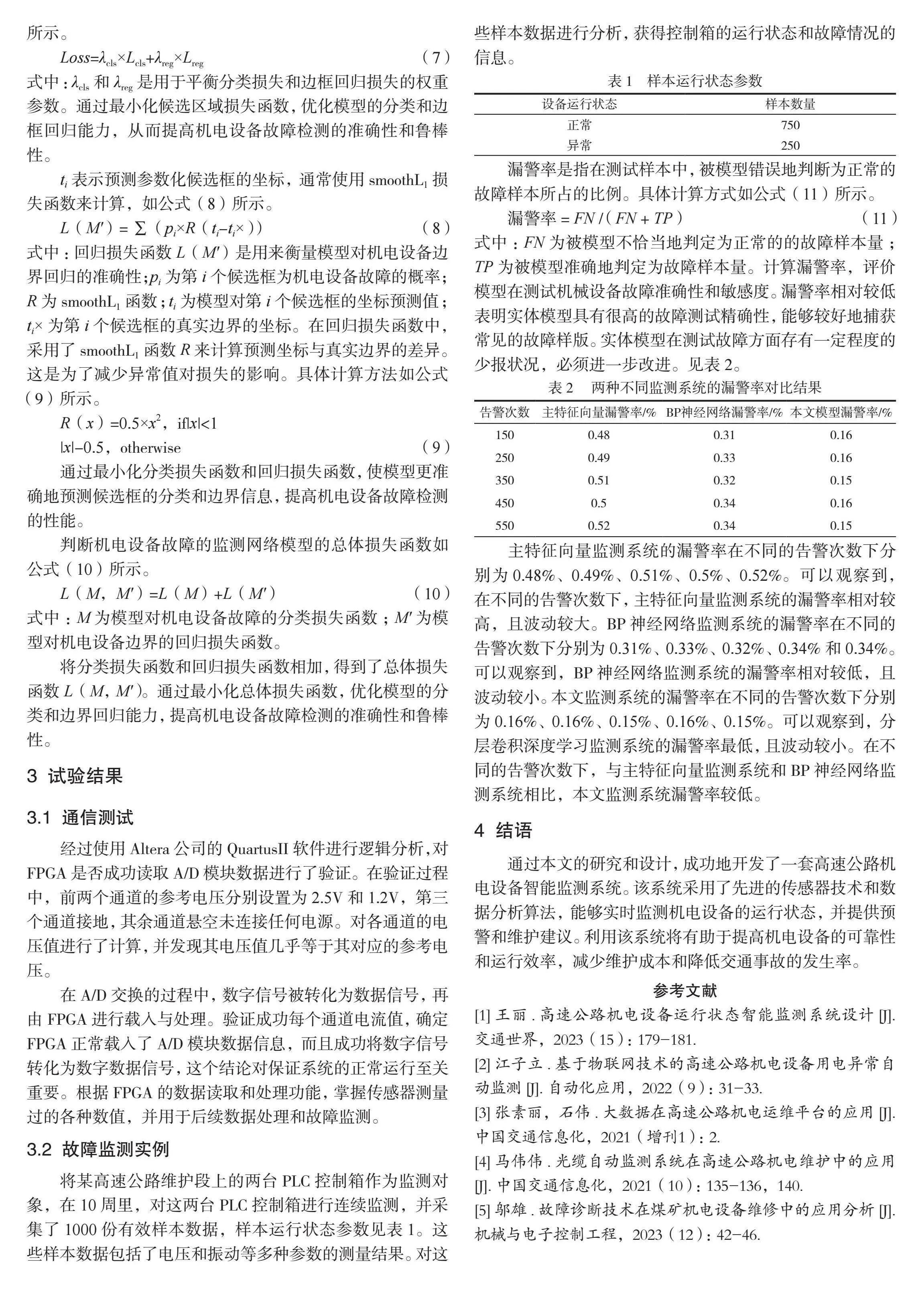
將某高速公路維護段上的兩臺PLC控制箱作為監測對象,在10周里,對這兩臺PLC控制箱進行連續監測,并采集了1000份有效樣本數據,樣本運行狀態參數見表1。這些樣本數據包括了電壓和振動等多種參數的測量結果。對這些樣本數據進行分析,獲得控制箱的運行狀態和故障情況的信息。
漏警率是指在測試樣本中,被模型錯誤地判斷為正常的故障樣本所占的比例。具體計算方式如公式(11)所示。
漏警率= FN / (FN + TP) (11)
式中:FN為被模型不恰當地判定為正常的的故障樣本量;TP為被模型準確地判定為故障樣本量。計算漏警率,評價模型在測試機械設備故障準確性和敏感度。漏警率相對較低表明實體模型具有很高的故障測試精確性,能夠較好地捕獲常見的故障樣版。實體模型在測試故障方面存有一定程度的少報狀況,必須進一步改進。見表2。
主特征向量監測系統的漏警率在不同的告警次數下分別為0.48%、0.49%、0.51%、0.5%、0.52%。可以觀察到,在不同的告警次數下,主特征向量監測系統的漏警率相對較高,且波動較大。BP神經網絡監測系統的漏警率在不同的告警次數下分別為0.31%、0.33%、0.32%、0.34%和0.34%。可以觀察到,BP神經網絡監測系統的漏警率相對較低,且波動較小。本文監測系統的漏警率在不同的告警次數下分別為0.16%、0.16%、0.15%、0.16%、0.15%。可以觀察到,分層卷積深度學習監測系統的漏警率最低,且波動較小。在不同的告警次數下,與主特征向量監測系統和BP神經網絡監測系統相比,本文監測系統漏警率較低。
4 結語
通過本文的研究和設計,成功地開發了一套高速公路機電設備智能監測系統。該系統采用了先進的傳感器技術和數據分析算法,能夠實時監測機電設備的運行狀態,并提供預警和維護建議。利用該系統將有助于提高機電設備的可靠性和運行效率,減少維護成本和降低交通事故的發生率。
參考文獻
[1]王麗.高速公路機電設備運行狀態智能監測系統設計[J].交通世界,2023(15):179-181.
[2]江子立.基于物聯網技術的高速公路機電設備用電異常自動監測[J].自動化應用,2022(9):31-33.
[3]張素麗,石偉.大數據在高速公路機電運維平臺的應用[J].中國交通信息化,2021(增刊1):2.
[4]馬偉偉.光纜自動監測系統在高速公路機電維護中的應用[J].中國交通信息化,2021(10):135-136,140.
[5]鄔雄.故障診斷技術在煤礦機電設備維修中的應用分析[J].機械與電子控制工程,2023(12):42-46.
猜你喜歡
建材發展導向(2021年20期)2021-11-20 05:43:18
鴨綠江(2021年17期)2021-10-13 07:05:32
中國交通信息化(2020年8期)2021-01-26 00:51:18
中國交通信息化(2020年10期)2021-01-14 03:29:50
中國交通信息化(2019年6期)2019-08-23 08:28:40
小學閱讀指南·低年級版(2017年11期)2017-12-06 15:14:59
中國交通信息化(2017年3期)2017-06-08 06:09:23
中國交通信息化(2016年9期)2016-06-06 07:42:10
小說月刊(2014年4期)2014-04-23 08:52:20
筑路機械與施工機械化(2014年5期)2014-03-01 02:59:08
