基于激光雷達的周界立體安防監測方法
2024-12-06 00:00:00崔亞東
中國新技術新產品 2024年21期


摘 要:為了提高重要場所周界防護的安全性,本文研究一種基本于激光雷達的周界立體安防監測方法。該方法設計了以激光雷達為基礎的系統架構,引用先進激光雷達目標識別技術、立體坐標標定技術、視頻自動跟蹤技術,實現對周界的立體安防監測。在重要場所圍墻內外側、上方可形成一個立體空間防護警戒區域,進行全方位立體的報警監測。試驗結果表明,該方法可精準定位入侵目標位置,聯動視頻跟蹤并報警,形成了周界立體防護效果,大大提升安防等級水平,可應用于重要場所的周界安防。
關鍵詞:激光雷達;周界;立體安防
中圖分類號:TU 855 文獻標志碼:A
傳統的重要場所,例如核電站、監所等周界防護技術手段大多采用電子圍欄、紅外對射、激光對射、泄漏電纜等,是以“線”的監測方式進行監測的,警戒區域存在很多盲區,且定位不準確,給安全管理帶來一定的隱患。本文采用無縫覆蓋“面”監測技術,實現對圍墻外側通道、圍墻上方、內側通道及空中的全覆蓋監控,形成一個立體防護區域,達到對周界的無死角監控,對入侵目標精準跟蹤,大大提高了安全智能化程度及保障水平[1-3]。
1 激光雷達立體安防系統架構設計
1.1 系統架構圖
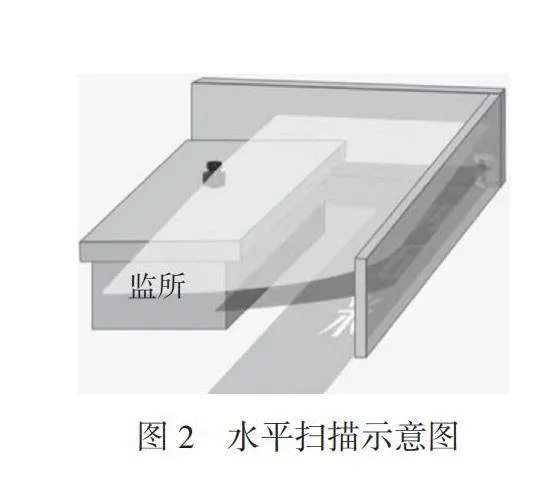
系統基于C/S構架,采用分布式架構設計。建設的激光雷達立體安全系統可集中管理雷達數據、展示位置、報警及視頻等功能。激光雷達立體安防系統架構如圖1所示。系統架構主要由終端應用層、服務管理層、網絡傳輸層及前端感知層組成。
1.1.1 終端應用層
終端應用層主要是完成用戶界面展示及配置管理功能,軟件程序放置在管理終端中。終端軟件采用平面電子地圖,可在電子地圖上展示所有監控信息,例如目標報警、軌跡、視頻報警畫面等,能夠從全局視角對入侵目標進行管理。
1.1.2 服務管理層
服務管理層主要是完成前端感知傳感器的接入、存儲、管理等功能,同時將數據信息發送給終端應用層或者第三方接口。軟件程序主要放置在服務器中。
服務器程序由主控服務程序軟件模塊、數據存儲服務軟件模塊、視頻服務軟件模塊及第三方接口程序模塊組成。
1.1.3 網絡傳輸層
網絡傳輸層主要是由交換機或者光收發器組成的以太網絡,實現前端感知設備與服務器的數據傳輸功能。
1.1.4 前端感知層
前端感知層主要由激光雷達、高速球機、聲光告警等組成。
高速球形攝像機采用200萬像素以上的高清球形攝像機,具備夜視功能,可清晰看清監控區域,并接收激光雷達的指令高速跟蹤運動目標。
激光雷達采用探測角度不小于270°、探測頻率不小于50Hz、探測半徑30m/60m/100m等不同距離的雷達。
聲光告警采用室外高分貝的告警設備,將告警信息接入激光雷達I/O口,實現報警控制。
1.2 系統功能設計
1.2.1 防區全覆蓋、監控無死角、形成立體防護
采用激光平面掃描技術,在警戒區域安裝激光雷達裝置,實現對地面、圍墻及空中的全覆蓋、無死角的立體無縫防護。
1.2.2 精準定位、軌跡跟蹤
采用先進的激光掃描技術,完全不同于傳統安防技術,定位精度高,可達到厘米級的精準定位,實現對入侵目標的軌跡跟蹤、實時距離顯示[4]。
1.2.3 斷電斷網下獨立工作,防止突發事件
激光雷達裝置內置嵌入式模塊及電池,可實現在斷網、不聯網的情況下獨立工作,針對發生的突發事件,具有本地聲光告警功能[5]。
1.2.4 防區、人員出入綠色通道靈活設置
根據現場復雜的環境,支持不同規則形狀、不同數量的防區,可根據工作業務流程智能劃定預警區、報警區以及人員綠色通道區域;在不增加前端感知終端數量的情況下,解決現場復雜問題。
1.2.5 多目標檢測、報警自動視頻跟蹤
具有多目標檢測、實時視頻跟蹤功能;當發現入侵目標時,可聯動攝像機自動跟蹤,不需要人員參與操作,實現了報警畫面自動彈出、視頻智能跟蹤功能。
1.2.6 全天候工作
采用激光雷達為探測傳感器,發送主動激光進行目標探測,在夜間也可正常工作,不需要照明補光,實現全天候的監控;采用905nm紅外激光,人眼不可見,人眼安全,即安全又隱蔽。
1.3 主要性能設計
本文研究的基礎設備為激光雷達,設計的主要性能參數如下。1)探測可達半徑30m/60m/100m等不同距離。2)探測角度可達270°,實現監控區域無盲區覆蓋。3)角分辨率支持0.25°/0.5°。4)安全等級1級,對人眼安全。5)掃描頻率25Hz/50Hz。6)通信接口采用有線通信。7)斷電斷網情況下獨立工作,前端監測裝置具有嵌入式算法能力,在突發斷電、斷網的情況下,發現目標并驅動聲光報警。8)報警區域自由設定,根據工作區可設置綠色通道、報警區、預警區,同時可按時間段自動布撤防。9)控制面板上具備布撤防按鈕、報警按鈕、取消報警按鈕。
2 激光雷達立體安防系統模塊構建
本文立體安防系統主要包括激光雷達目標識模塊、視頻跟蹤模塊及軟件平臺展示模塊。
2.1 激光雷達目標識別模塊
激光雷達是一種采用“光速—時間”飛行原理,通過高速掃描對二維場景(平面)進行復現的技術。設備將脈沖激光發射并接收反射信號,通過時間差計算目標物的距離;此測量過程在高速旋轉過程中不斷重復,得到多組不同角度下目標物距離數據。激光束發射的頻率可達上萬個脈沖,可獲得目標距離、方位、速度甚至形狀等參數,從而實現對目標的探測、跟蹤和識別[6-7]。
本方法的目標識別模塊主要是基于雷達點云,通過樣本采集、特征提取、工程化設計完成目標識別算法。基于激光雷達點云的目標識別,對一幀點云數據進行聚類并提取目標線段,采集的大量試驗數據獲取各類目標的特征值參考區間,然后通過特征匹配的方式完成目標類別的識別[8]。形成初步目標識別算法后,再根據現場應用環境提取各種干擾因素,進行過濾,形成最終的可應用的目標識別算法。具體的技術路線如下。1)點云樣本采集。利用激光雷達采集場景點云數據,并對采集的點云數據進行去噪、基本濾波操作,提高數據的質量和清晰度,再對點云數據進行分割,提取目標并進行特征計算,包括大小、形狀、類型等。2)卡爾曼濾波應用。卡爾曼濾波是一種常用的濾波算法。采用卡爾曼濾波對動態目標的位置和速度進行準確估計,可以對動態目標進行準確跟蹤,提取目標的軌跡、速度等信息。3)聚類算法。采用改進的聚類算法對前景點進行聚類。由于激光雷達數據具有離散性,且前景點中除了目標數據還存在噪聲點,因此在聚類后需要進一步判斷分析。
2.2 視頻跟蹤模塊
本方法采用高速網絡球機進行目標跟蹤,接收激光雷達的定位數據對目標物進行鎖定和持續的跟蹤和監控。平臺接收激光雷達定位數據,通過三點標定法獲取目標在攝像機中的坐標并控制網絡球機和報警裝置,實現整體的控制和管理。激光雷達和網絡球機的世界坐標變換三點標定算法如下。1)選取三個坐標位置,對應球機和雷達的坐標分別如下。第一個點,(x1,y1,z1),(X1,Y1,Z1);第二個點,(x2,y2,z2),(X2,Y2,Z2);第三個點,(x3,y3,z3),(X3,Y3,Z3)。2)計算變換參數。坐標變換的參數計算如公式(1)~公式(12)所示。3)球機坐標(x,y,z)與雷達坐標(X,Y,Z)的變換過程如公式(13)~公式(15)所示。
(1)
(2)
t2=0 (3)
t3=x1-t0×X1-t1×Y1 (4)
(5)
(6)
t6=0 (7)
t7=y1-t4×X1-t5×Y1 (8)
t8=0 (9)
t9=0 (10)
t10=-1 (11)
t11=Z1+z1 (12)
x=t0×X+t1×Y+t2×Z+t3 (13)
y=t4×X+t5×Y+t6×Z+t7 (14)
z=t8×X+t9×Y+t10×Z+t11 (15)
通過3個點的坐標把激光雷達和網絡球機標定到世界坐標系中,完成激光雷達和網絡球機的坐標標定。當激光雷達檢測到警戒區域內有目標時,通過球機坐標和雷達坐標的變換公式把目標物在激光雷達中的坐標變換為目標物在球機中的坐標,驅動球機跟蹤目標物,完成云臺全方位(左右/上下)移動及鏡頭變倍、變焦控制,使目標物完全展示在網絡球機的圖像中。
2.3 軟件平臺展示模塊
本系統平臺軟件檢測到入侵目標會觸發報警,聯動聲光威懾,在全局地圖上進行入侵目標軌跡顯示,語音報警提示,并聯動監控視頻進行精準跟蹤。系統平臺軟件功能如下。1)入侵目標監測功能,通過激光雷達掃描人員、車輛軌跡進行路線及位置的精準定位;監測中心可在電子地圖上實時看到人員所處位置、軌跡、分布情況等內容[9-10]。2)視頻聯動功能,激光雷達檢測到目標后通過內置算法,實現與球機聯動控制,對入侵目標進行實時跟蹤,確保入侵目標在視頻畫面中。3)全景地圖功能,終端界面采用全景地圖方式,在全景地圖上展示入侵目標位置、視頻、報警信息等。4)查詢功能,可查詢任意時間的歷史告警數據、軌跡、視頻信息等。5)運行狀態巡檢功能,系統具備自動檢測功能,當監測裝置出現故障時,在終端軟件提示告警信息。
3 系統試驗結果及分析
根據激光雷達監測方式不同,采用2種方式進行現場安裝試驗并進行效果測試,記錄分析結果。
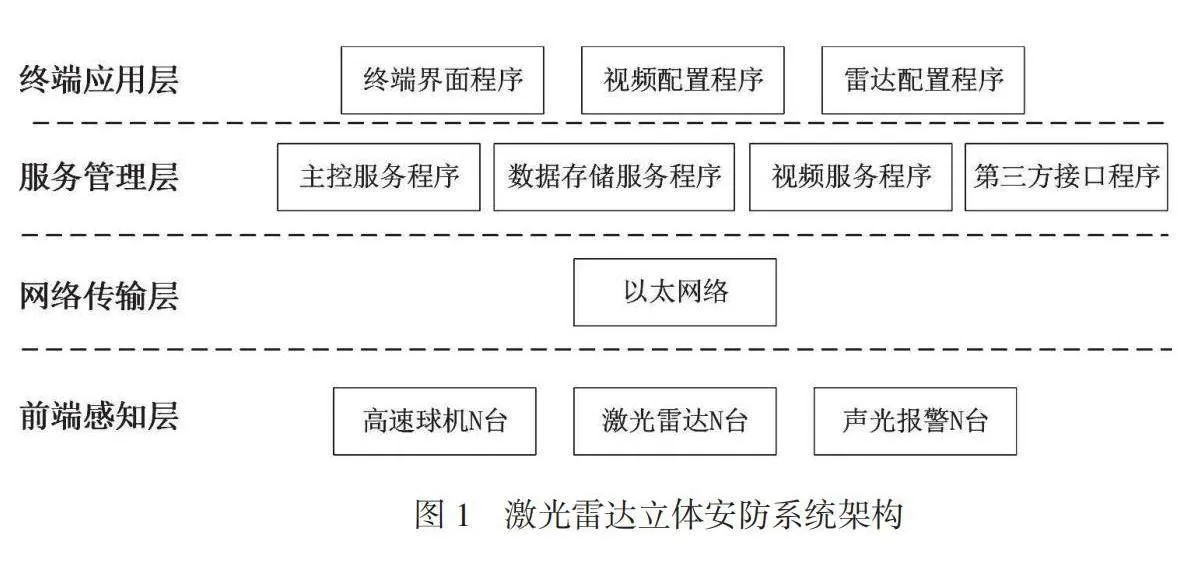
3.1 試驗環境—水平掃描方式
水平掃描方式主要將激光雷達的掃描面平行于水平面進行監測,可實現對圍墻內側通道上方空間區域、內側通道下方區域的監測。水平掃描示意圖如圖2所示。
3.1.1 內側通道上方空間區域
在圍墻上方空間區域形成一面不可見無縫的監測面,實現對攀爬墻、屋頂入侵目標的精準定位及報警,實現上空的覆蓋。
3.1.2 內側通道下方空間區域
在圍墻內側通道下方空間區域形成一面不可見無縫監測面,實現對內側通道入侵行為的精準定位及報警。
3.1.3 報警區域自由設置
可根據現場復雜環境(人員通道、車輛通道等)劃分告警區與不告警區。針對日常活動區域,按時間段自動布防及撤防。同時,根據工作需要設置綠色通道區域。
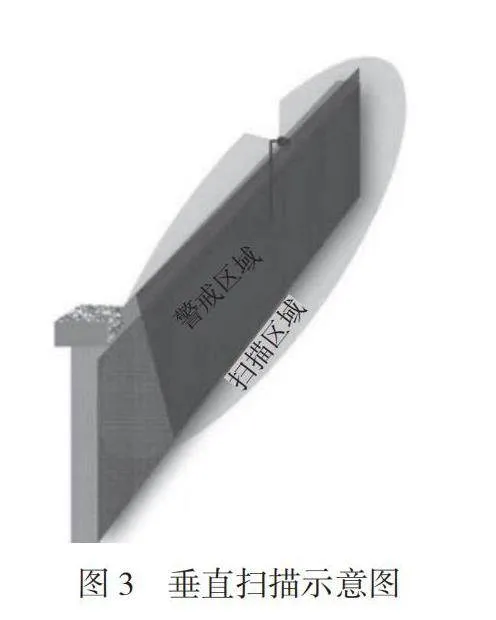
3.2 試驗環境—垂直掃描方式
垂直掃描方式主要將激光雷達的掃描面垂直于水平面進行監測,實現對圍墻上方空間區域、圍墻下方區域的檢測。垂直掃描示意圖如圖3所示。
3.2.1 圍墻上方空間區域
在圍墻上方空間區域形成一面不可見約0.5m~1m(可自由設置)的監測面,實現對攀爬墻、墻面行走人員的精準定位及報警。
3.2.2 圍墻下方空間區域
在圍墻下方空間區域形成一面不可見至地面的監測面。實現對墻下活動人員、穿墻入侵行為的精準定位及報警。紅外對射、電子圍欄不具備此功能。
3.2.3 報警區域自由設置
可根據現場復雜環境(樹木、雜草等)劃分告警區和不告警區。針對墻下活動區域,按時間段自動布防及撤防。同時,根據工作需要設置綠色通道區域。
3.3 試驗結果分析
此次為了保證數據的準確性,選擇監獄圍墻通道進行試驗,圍墻已安裝了紅外對射、電子圍欄及振動光纖傳感器,進行4種傳感對比測試,試驗結果見表1。
將本文方法與其他傳感器進行對比試驗測試。從表1中可以準確看出,基于激光雷達的立體監測方法可適于水平面、垂直面等不同平面的掃描,形成立體空間防護,其他傳感器不具備此條件。激光雷達具備精準定位、視頻自動跟蹤功能,其他傳感器僅有防區報警,只能預置位聯動,無法實現精準定位及視頻跟蹤。激光雷達可實現無盲區、精準定位入侵目標。該方法能夠實現圍墻周界的立體防護,解決圍墻盲區隱患問題。因此,基于激光雷達的立體安防系統監測方法具有較高的實用性及推廣價值。
4 結語
本文基于激光雷達的周界立體安防監測方法的研究解決了傳統傳感器只能以“線”監測技術的缺陷,采用無縫覆蓋“面”監測技術,實現對警戒區域進行全覆蓋的立體感知,具備軌跡跟蹤、視頻聯動、綠色通道、防區靈活設置等優勢,提升了安全性及管理水平。本文旨在為重要場所周界安防提供更可靠、更有效的技術手段,也能促進激光雷達在重要場所圍墻安防的推廣及應用。
參考文獻
[1]沈亞.達州某看守所武警中隊執勤安保信息系統設計[J].現代建筑電氣,2022(2):34-38.
[2]郭子明.基于激光雷達點云的目標識別與跟蹤方法[J].照明工程學報,2023(5):64-67.
[3]余博,楊森,王珣,等.基于激光雷達與視頻結合的鐵路異物探測技術研究[J].高速鐵路技術,2023(1):48-53.
[4]孫嘉澤.輪式安防巡邏車定位及視覺感知算法研究[D].濟南:山東大學,2022.
[5]孫學榮.單線激光雷達三維成像方法及應用[D].西安:西安電子科技大學,2022.
[6]方曉君.看守所急需“四化”的實戰指揮系統[J].中國安防,2015(合刊2):40-43.
[7]張祥雨,閆華學,劉金彤.基于物聯網的監所智慧安防設計與實現[J].警察技術,2022(1):15-19.
[8]劉湘黔,劉海妹,常浩.智能安防巡檢機器人監控系統關鍵技術研究[J].中國新技術新產品,2024(7):12-14.
[9]李秀平.激光雷達動目標檢測技術研究[D].桂林:桂林電子科技大學,2023.
[10]李懿,井偉.多激光雷達行人跟蹤安防系統設計研究[J].信息與電腦(理論版),2022,34(16):125-127.
