基于改進卷積網絡的無人駕駛汽車動態避障路徑規劃方法
2024-12-08 00:00:00李士攀
中國新技術新產品 2024年3期
關鍵詞:規劃
摘 要:為了提高無人駕駛汽車動態避障的成功率,實現路徑最優規劃目標,本文引入了改進卷積網絡,并開展了基于該網絡的無人駕駛汽車動態避障路徑規劃方法研究。首先,建立了精確的汽車運動學模型,以描述無人駕駛汽車在行駛過程中的運動學特性。其次,對道路障礙物目標位置進行檢測,連續獲取道路動態障礙物目標的信息,預測障礙物未來的位置和速度。最后,在此基礎上,利用改進卷積網絡計算了無人駕駛汽車動態避障路徑損失函數,評估了規劃避障路徑與實際目標路徑之間的差距。同時,輔助人工勢場法求解勢能的最小值,得到了汽車避障路徑。試驗結果表明,應用本文提出的規劃方法后,在6個車道上,無人駕駛汽車的動態避障成功率始終高于另外2個對照組,均達到了99%以上,可以有效地識別障礙物并進行避障。
關鍵詞:改進卷積網絡;無人駕駛汽車;動態;避障;規劃;路徑
中圖分類號:TP 301 " " " " " 文獻標志碼:A
隨著科技的快速發展,無人駕駛汽車已成為當今研究的熱點之一。無人駕駛汽車主要通過車載傳感器的感知作用,實時感知并識別汽車行駛周邊的環境信息和狀態變化,這些感知信息被用來控制汽車的轉向和速度,實現無須人工駕駛的目標[1]。作為智能化控制技術的產物,無人駕駛汽車在運行過程中必須同時具備多種功能,包括行駛路徑規劃、決策控制以及定位導航等。只有這些功能相互協調,才能保障無人駕駛汽車在行駛過程中的安全性,同時也能為乘客提供良好的乘車體驗[2]。其中,動態避障路徑規劃是確保無人駕駛汽車安全行駛的關鍵技術之一,旨在規劃一條避開障礙物的安全路徑,使汽車能夠順利到達目的地[3]。
當前,傳統的無人駕駛汽車動態避障路徑規劃方法多采用文獻[3]提出的方法,當使用這些方法處理動態避障路徑規劃問題時,往往存在準確性不高、實時性不強等問題。
改進卷積網絡(Convolutional Neural Network,CNN)能夠改善傳統避障路徑規劃方法的不足。通過對卷積神經網絡進行優化和改進,以提高其在特定任務上的性能和準確性[4]。改進卷積網絡的目標是更好地處理具有類似網格結構的數據以及在處理過程中提高網絡的特征提取能力和泛化性能。
基于此,本文引入了改進卷積網絡,并開展了基于該網絡的無人駕駛汽車動態避障路徑規劃方法研究,旨在提高無人駕駛汽車的安全性和行駛效率。通過優化和改進卷積神經網絡,提高動態避障路徑規劃的準確性和實時性,使無人駕駛汽車能夠在復雜的環境中實現自主駕駛。
1 無人駕駛汽車動態避障路徑規劃方法研究
1.1 無人駕駛汽車運動學建模
由于無人駕駛汽車是一個多自由度、高耦合度的復雜系統,因此在對其動態避障路徑進行規劃之前,需要建立1個精確的模型來描述無人駕駛汽車在行駛過程中的運動學特性。根據這些特性,可以規劃與車輛控制需求適配度最高的避障路徑[5]。
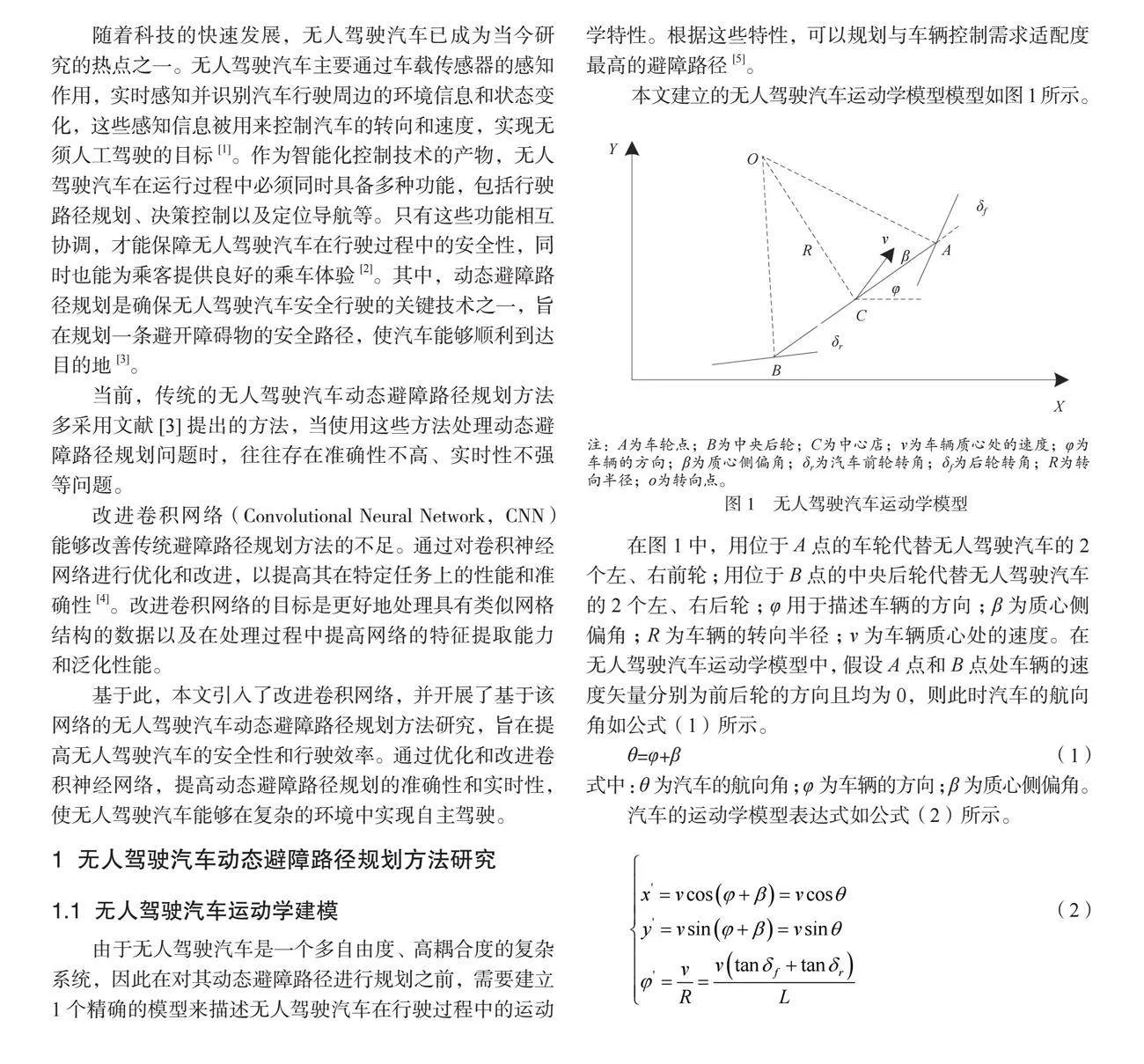
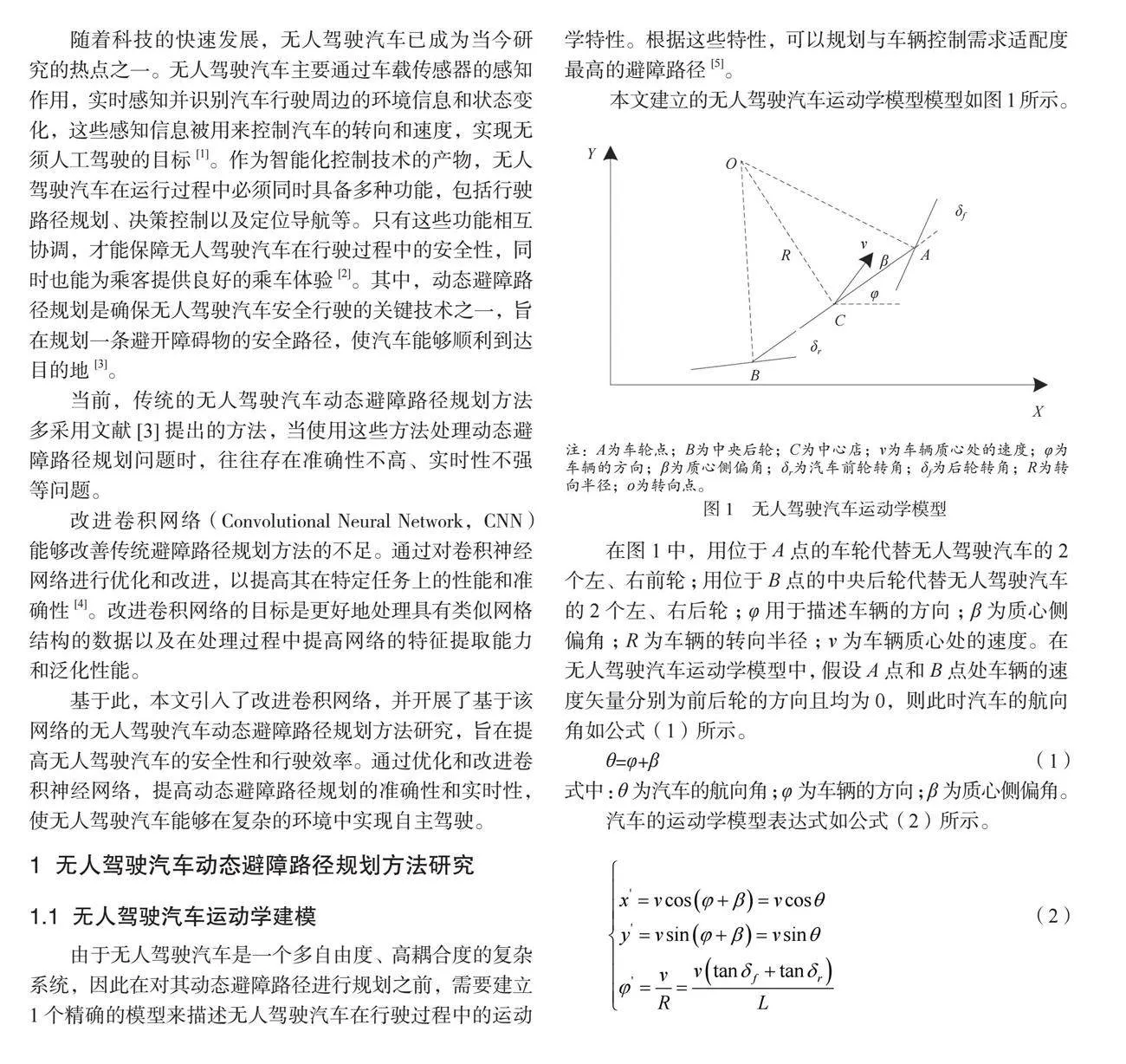
本文建立的無人駕駛汽車運動學模型模型如圖1所示。
在圖1中,用位于A點的車輪代替無人駕駛汽車的2個左、右前輪;用位于B點的中央后輪代替無人駕駛汽車的2個左、右后輪;φ用于描述車輛的方向;β為質心側偏角;R為車輛的轉向半徑;v為車輛質心處的速度。在無人駕駛汽車運動學模型中,假設A點和B點處車輛的速度矢量分別為前后輪的方向且均為0,則此時汽車的航向角如公式(1)所示。
θ=φ+β " " " " " " " " " " " " "(1)
式中:θ為汽車的航向角;φ為車輛的方向;β為質心側偏角。
汽車的運動學模型表達式如公式(2)所示。
(2)
式中:x'、y'、φ'分別為汽車橫向坐標、縱向坐標、方向夾角;v為車輛質心處的速度;L為行駛距離;δf、δr分別為汽車前輪轉角與后輪轉角。汽車的速度屬于外部變量,可以通過傳感器測量得出。
由于無人駕駛汽車對橫向加速度有嚴格的限制,因此,在汽車換道避障過程中,不會發生側向滑動現象[6]。通過汽車運動學建模,明確汽車在行駛過程中的狀態量與控制量,根據二者之間存在的關聯,保證汽車行駛的穩定性[7]。
1.2 障礙物目標位置檢測
無人駕駛汽車在運動學建模完成后,獲取汽車行駛的狀態量與控制量,然后,對道路障礙物目標位置進行檢測,連續獲取道路動態障礙物目標的信息,為后續動態避障路徑規劃提供有力的支持。利用超聲波傳感器采集道路圖像或點云數據。對采集到的數據進行預處理,包括濾波、去噪、圖像增強等,以提高道路障礙物目標數據的質量和可靠性[8]。采用基于特征的方法原理,根據預處理后的數據識別障礙物。道路動態障礙物識別包括二分類(有無動態障礙物)和多分類(不同種類的動態障礙物)2種[9]。根據識別結果,對障礙物的位置進行估計。跟蹤檢測到的障礙物,預測其未來的位置和速度,以便無人駕駛汽車能夠動態避障。
1.3 基于改進卷積網絡規劃汽車動態避障路徑
道路障礙物目標位置檢測完畢后,得到道路動態障礙物相關信息。在此基礎上,利用改進卷積網絡規劃無人駕駛汽車最優的動態避障路徑。
利用改進卷積網絡計算無人駕駛汽車動態避障路徑的損失函數,如公式(3)所示。
H=∑(di-di')?2/n (3)
式中:H為無人駕駛汽車動態避障路徑損失函數;di為規劃出的路徑從第i個采樣點到目標點的距離;di'為實際目標路徑從第i個采樣點到目標點的距離;n為采樣點的數量。
通過路徑損失函數,可以評估規劃的避障路徑與實際目標路徑之間的差距。在此基礎上,綜合考慮無人駕駛汽車換道避障時的車輛穩定性與安全性,以控制汽車換道躍度值為目標,規劃動態避障路徑。設定無人駕駛汽車的起始點橫坐標為x0,終點橫坐標為xf。以汽車的質心O(x,y)作為位置坐標,根據汽車可行駛區域的相關參數,確定汽車質心的可行駛區域。在此基礎上,尋找避障路徑規劃的最優控制量。在無人駕駛汽車換道避障的過程中,以避障最短時間作為路徑規劃的性能指標,使汽車能夠以最短的時間避開道路前方的動態障礙物,并實現變道。
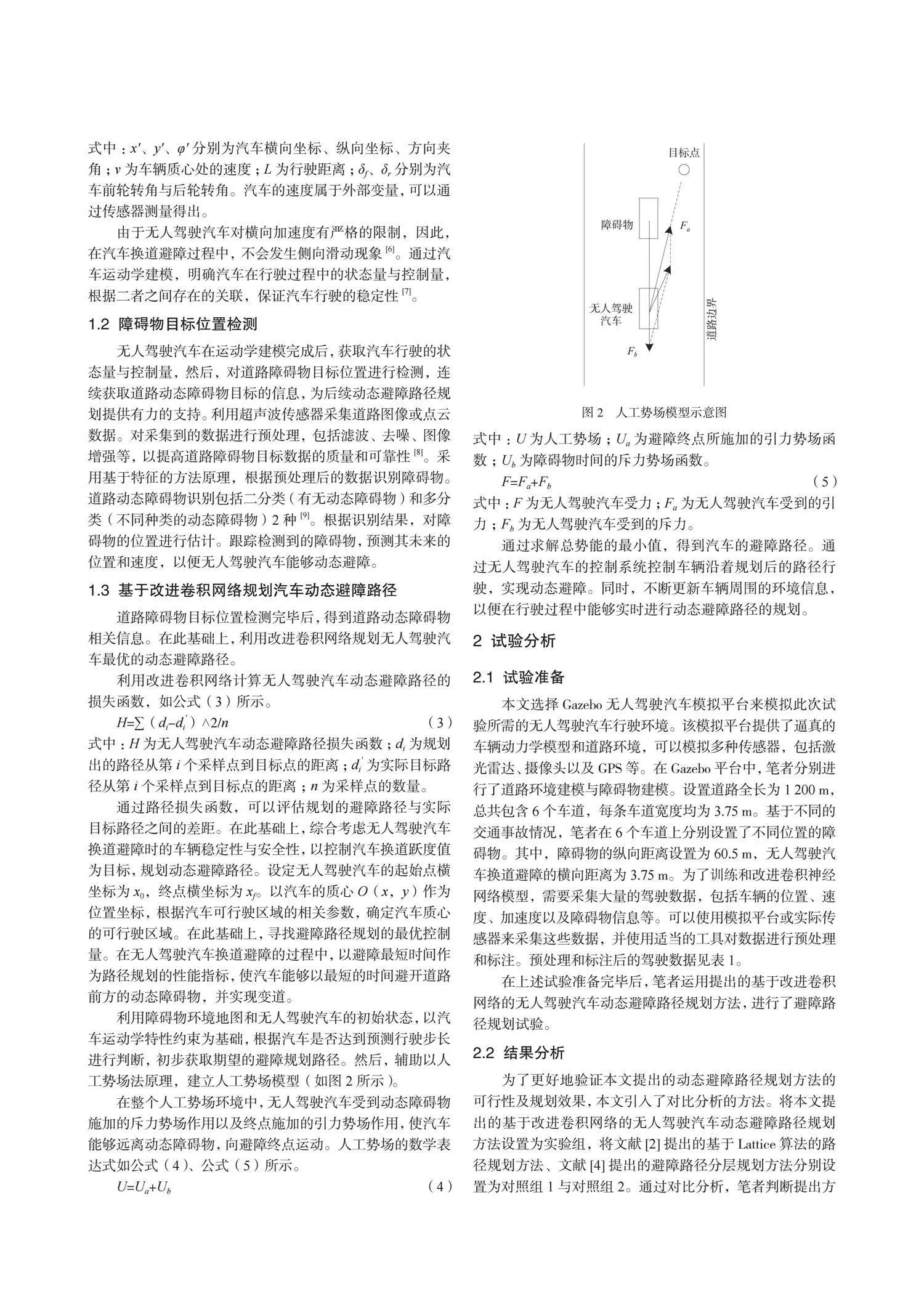
利用障礙物環境地圖和無人駕駛汽車的初始狀態,以汽車運動學特性約束為基礎,根據汽車是否達到預測行駛步長進行判斷,初步獲取期望的避障規劃路徑。然后,輔助以人工勢場法原理,建立人工勢場模型(如圖2所示)。
在整個人工勢場環境中,無人駕駛汽車受到動態障礙物施加的斥力勢場作用以及終點施加的引力勢場作用,使汽車能夠遠離動態障礙物,向避障終點運動。人工勢場的數學表達式如公式(4)、公式(5)所示。
U=Ua+Ub (4)
式中:U為人工勢場;Ua為避障終點所施加的引力勢場函數;Ub為障礙物時間的斥力勢場函數。
F=Fa+Fb (5)
式中:F為無人駕駛汽車受力;Fa為無人駕駛汽車受到的引力;Fb為無人駕駛汽車受到的斥力。
通過求解總勢能的最小值,得到汽車的避障路徑。通過無人駕駛汽車的控制系統控制車輛沿著規劃后的路徑行駛,實現動態避障。同時,不斷更新車輛周圍的環境信息,以便在行駛過程中能夠實時進行動態避障路徑的規劃。
2 試驗分析
2.1 試驗準備
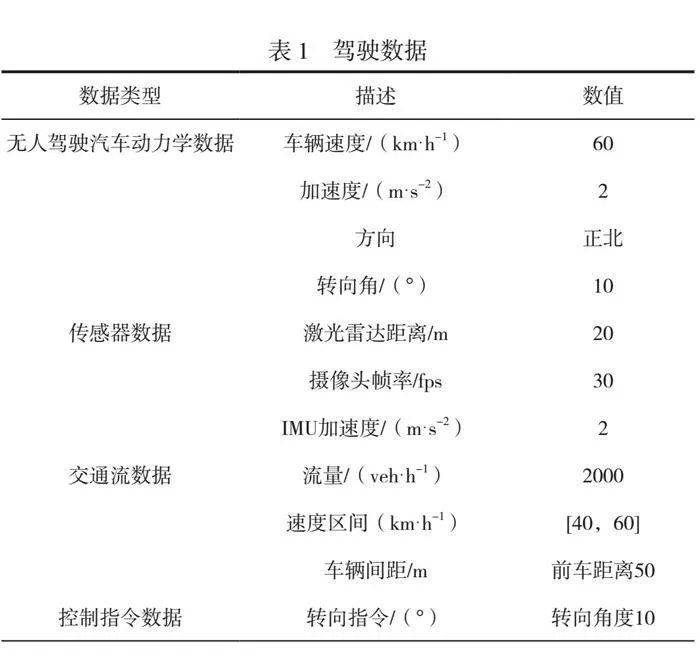
本文選擇Gazebo無人駕駛汽車模擬平臺來模擬此次試驗所需的無人駕駛汽車行駛環境。該模擬平臺提供了逼真的車輛動力學模型和道路環境,可以模擬多種傳感器,包括激光雷達、攝像頭以及GPS等。在Gazebo平臺中,筆者分別進行了道路環境建模與障礙物建模。設置道路全長為1 200 m,總共包含6個車道,每條車道寬度均為3.75 m。基于不同的交通事故情況,筆者在6個車道上分別設置了不同位置的障礙物。其中,障礙物的縱向距離設置為60.5 m,無人駕駛汽車換道避障的橫向距離為3.75 m。為了訓練和改進卷積神經網絡模型,需要采集大量的駕駛數據,包括車輛的位置、速度、加速度以及障礙物信息等。可以使用模擬平臺或實際傳感器來采集這些數據,并使用適當的工具對數據進行預處理和標注。預處理和標注后的駕駛數據見表1。
在上述試驗準備完畢后,筆者運用提出的基于改進卷積網絡的無人駕駛汽車動態避障路徑規劃方法,進行了避障路徑規劃試驗。
2.2 結果分析
為了更好地驗證本文提出的動態避障路徑規劃方法的可行性及規劃效果,本文引入了對比分析的方法。將本文提出的基于改進卷積網絡的無人駕駛汽車動態避障路徑規劃方法設置為實驗組,將文獻[2]提出的基于Lattice算法的路徑規劃方法、文獻[4]提出的避障路徑分層規劃方法分別設置為對照組1與對照組2。通過對比分析,筆者判斷提出方法的可行性。
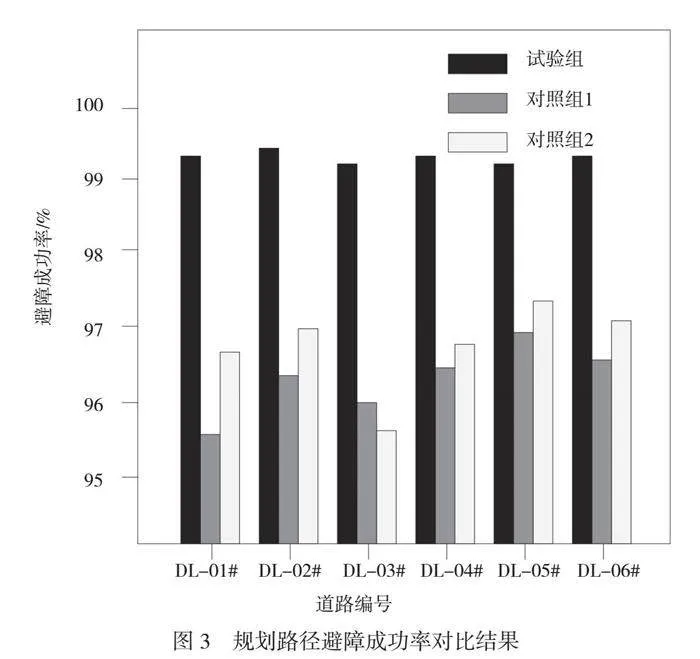
本文選取無人駕駛汽車動態避障規劃路徑的避障成功率,作為本次試驗的對比指標,評估規劃出的路徑是否能夠使無人駕駛汽車準確地避開設置的障礙物。計算過程如公式(6)所示。
(6)
式中:Q為避障成功率,Q值越大,說明規劃的動態避障路徑準確性越高,反之同理;Rx為動態避障規劃路徑成功避開障礙物的次數;R為總測試次數。
對上述的6個模擬車道進行編號,分別為DL-01#、DL-02#、DL-03#、DL-04#、DL-05#、DL-06#。筆者測定了應用3種規劃方法后,動態避障路徑的避障成功率,并進行了客觀對比,結果如圖3所示。
通過圖3的評估指標對比結果可以看出,應用3種規劃方法后,規劃路徑的避障成功率存在明顯差異。應用本文提出的基于改進卷積網絡的無人駕駛汽車動態避障路徑規劃方法后,6個車道的無人駕駛汽車動態避障成功率始終高于另外2個對照組,均達到了99%以上。這表明該方法可以有效地識別障礙物并進行避障,具有較高的可行性,對提高無人駕駛汽車行駛的安全性起到了重要作用。
3 結語
綜上所述,動態避障路徑規劃是無人駕駛汽車必須具備的性能之一,對無人駕駛汽車行駛的安全性、舒適性以及可靠性起到了重要作用。因此,本文提出了一種基于改進卷積網絡的無人駕駛汽車動態避障路徑規劃方法。試驗結果表明,該方法能夠在復雜的環境中有效地識別障礙物并預測其運動軌跡,同時能夠規劃一條安全、高效的避障路徑,提高汽車避障成功率。本文的研究可以提高無人駕駛汽車的安全性和行駛效率,推動智能化汽車控制行業的發展。除此之外,本文提出的研究還可以為其他領域的路徑規劃問題提供參考,具有廣泛的應用前景。
參考文獻
[1]張立霞,張莉莉,劉晉麗.基于強化學習優化汽車智能換道與間距預警的汽車避障系統[J].自動化與儀器儀表, 2023(8):139-143.
[2]任書宇,吳欽木,周還籍.基于改進A~*和Lattice算法的自動駕駛汽車路徑規劃研究[J].計算機與數字工程,2023,51(2):342-347.
[3]李亞輝,劉成曄,趙景波,等.自動駕駛汽車路徑規劃與軌跡跟蹤研究綜述[J].常州工學院學報,2023,36(1):28-33.
[4]劉藝,童亮,徐子豐,等.考慮障礙物風險場的智能車輛避障路徑分層規劃方法[J]. 北京信息科技大學學報(自然科學版),2023,38(1):24-31.
[5]陳鵬宇,孔令安,彭憶強.基于五階Bezier曲線的無人車避障軌跡規劃[J].科學技術與工程,2022,22(31):13933-13941.
[6]李文禮,肖凱文,任勇鵬,等.行人過街場景下車輛避障路徑規劃與控制方法[J].汽車安全與節能學報,2022,13(3):489-501.
[7]張智能,李以農,余穎弘,等.復雜動態環境下智能汽車局部路徑規劃與跟蹤算法研究[J].中國公路學報,2022,35(9):372-386.
[8]劉名洋,宋瑞,周建華,等.自動駕駛軌跡預測規劃技術及在交叉路口下的應用[J].北京汽車,2022(3):1-7,13.
[9]李耀華,范吉康,劉洋,等.自適應雙時域參數MPC的智能車輛路徑規劃與跟蹤控制[J].汽車安全與節能學報,2021,12(4):528-539.
猜你喜歡
房地產導刊(2021年6期)2021-07-22 09:12:46
中國石油石化(2021年9期)2021-07-17 09:24:00
中國農民合作社(2020年12期)2020-12-18 09:09:58
公民與法治(2020年11期)2020-07-25 02:02:06
河南水利年鑒(2020年0期)2020-06-09 05:43:30
領導決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
制造技術與機床(2017年3期)2017-06-23 08:11:34
中國衛生(2016年2期)2016-11-12 13:22:16
華東科技(2016年10期)2016-11-11 06:17:41
