基于SLAM的激光雷達智能小車設計與測試研究
2024-12-12 00:00:00李國印張岳宋建銘
電腦知識與技術 2024年29期

關鍵詞:機器視覺;智能送藥;CNN;A*算法;TEB算法;自動導航
0 引言
人工智能是當前熱門的研究領域,而智能機器便是其重要的產物。當前在科學技術不斷蓬勃發展的信息時代,智能移動設備及其產品的研究和設計,使其在醫療場所、商場、超市、餐廳旅館、維修清洗和家庭生活等方面有著廣泛的應用。目前,國內的眾多小中型醫院的送藥取藥基本都是依靠,人工運輸的方式,患者家屬常常需要在樓內的藥房和病房來回奔波好幾次去取藥,有時甚至需要病人自己上下樓然后排隊去取藥。對于進行換藥的醫護人員來說,取藥送藥仍是一件十分不方便的事情。
智能送藥設備[1]是一種低速、無人操控的自動化藥物運送車輛。其智能配送系統需要實現的主要功能為:從藥房領取所需藥品,沿預設定路線配送給各個病房,并在運送完成后實現自主返回藥房。通過這種送藥方式,醫護人員可以避免與病人的直接接觸,從而降低被傳染性疾病感染的風險。智能送藥設備通常配備傳感器、攝像頭和其他先進技術,使其能夠識別患者和藥品、跟蹤庫存并以高度準確和高效的方式交付藥品。本項目對于我國中小型醫院藥物運輸的實際情況做出分析和判斷,并給出了一種適合我國中小型醫院藥物運輸的智能藥物運輸設備[2]。
1 系統總體設計
1.1 設計思路
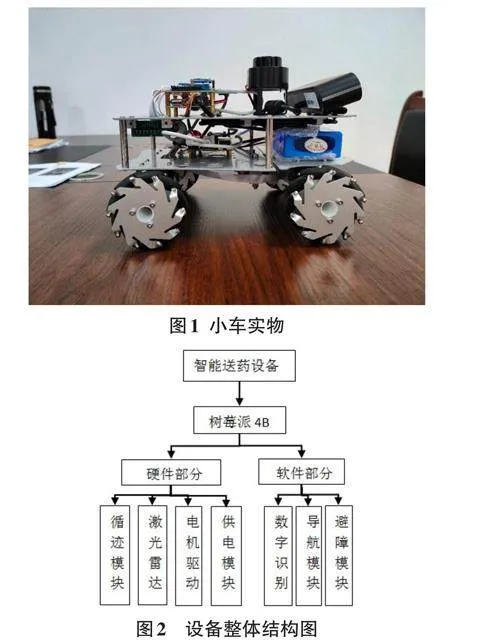
該設備主要包括四輪驅動車,主控芯片主要基于樹莓派4B,并帶有一個移動電源為樹莓派4B供電。同時在小車的前部安裝了一個USB攝像頭和一個激光雷達,并搭建了ESP8266WI-FI模塊,Wi-Fi模塊是一種能夠通過Wi-Fi網絡連接到互聯網的硬件設備,通常被用于實現無線網絡通信。實物如圖1所示。
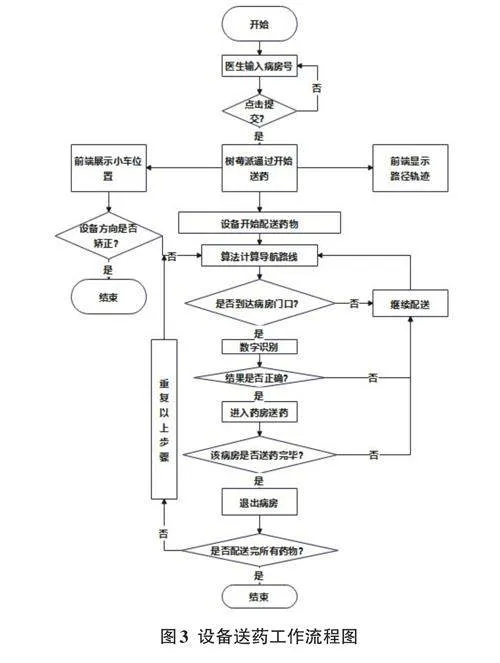
智能送藥設備的整體操作流程包括幾個關鍵步驟。首先,設備通過Wi-Fi模塊與遠程服務器或移動設備建立連接,接收到送藥指令后,設備能夠識別目標病房的位置。在藥物裝載完成之后,樹莓派4B 控制器對驅動電路模塊以及激光雷達自動導航模塊進行操控。激光雷達[3]有能力獲取高分辨率的三維點云數據,進而捕捉目標物體的豐富細節信息,使得設備在定位和障礙物檢測方面表現更為準確。然后,設備會尋找附近的路線并驅動至正確的路徑上行駛。當智能送藥車抵達目標病房時,攝像頭會拍攝門牌號。此時,數字圖像處理(Digital Image Processing) 技術會對圖像進行一系列處理,如去除噪聲、增強對比度、復原、分割和提取特征等。通過這些處理后,確認病房號碼正確無誤,將完成藥物的送達。接下來,設備將繼續前往下一個病房進行藥物投遞,如此循環直至所有需要送藥的病房都得到藥物。在整個送藥過程中,前端地圖實時展示設備的行駛路徑,并向用戶提示藥品送達的信息。這為用戶帶來更高效、更準確的藥品送達體驗。從設備的研發到實際應用過程中,智能送藥設備的整體操作流程則旨在提高藥物配送的效率和準確性,從而為醫護人員、患者以及醫療機構的運作帶來極大的便利。通過對送藥流程的實時監測,智能送藥車能夠確保藥品準確送至目標病房,從而提高整個醫療服務的質量。具體流程如圖3所示。
1.2 功能設計
智能送藥設備實現的功能有自主循跡、數字識別、前端展示以及避障功能,設備功能如圖 4所示。
1.2.1 自動導航模塊
智能送藥設備采用先進的激光雷達技術,能夠實時地構建周圍環境模型,并將這些模型轉換成可用于路徑規劃和導航的地圖。配送工作將通過設備實現自主導航,使得無人值守藥物配送成為可能。激光雷達的優勢在于提供高精度的距離和位置信息,使得自動導航系統具備更高的精確性和可靠性。值得一提的是,該技術已經不受光線、天氣等自然條件的影響,能在各種環境下正常運行,使得送藥服務不再受限于特定的時間和地點。激光雷達憑借其高速捕捉周邊環境信息的能力,實時計算并更新設備的位置和行駛路線規劃[4]。設備在進行自動導航時,能夠同時檢測多個物體,并獲取包括位置、尺寸在內的詳細信息,這是醫藥設備提升自動導航性能的關鍵因素。在行駛過程中,激光雷達起到了輔助設備避開障礙物和其他風險的作用,大幅度提高了智能送藥車在行駛途中的安全性。
智能送藥設備通過利用激光雷達等技術,在送藥領域帶來準確、高效的藥物配送新模式。這一模式無疑對提升整體醫療服務質量產生積極影響,為患者帶來便捷,同時也能減輕醫護人員的工作負擔。未來,智能配送將在提高設備性能、擴大應用領域等方面持續發展,從而更好地滿足醫療行業和患者的需求。
1.2.2 數字識別模塊
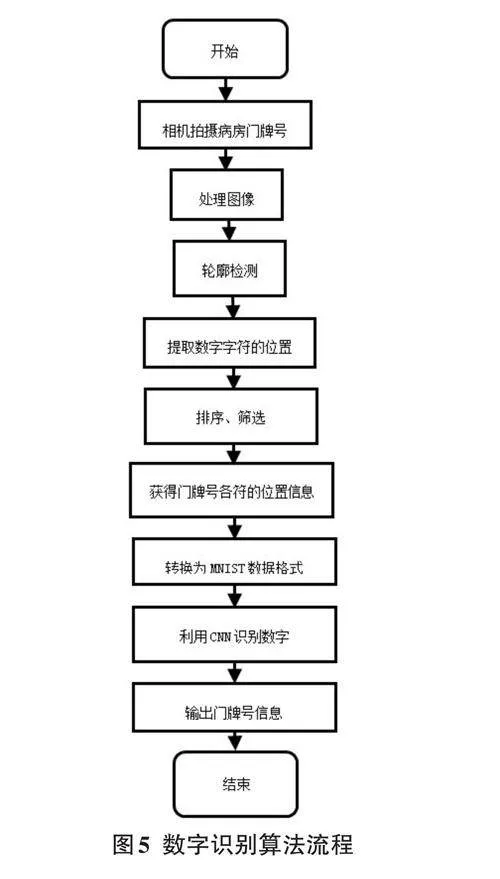
智能送藥設備利用攝像頭拍攝門牌號,由于拍攝圖像中存在噪聲,會對圖像識別的準確率產生影響,先采用OpenCV進行圖像預處理,然后采用目標檢測算法YOLO,數字識別算法CNN 對病房門牌進行識別。OpenCV在圖像預處理中可以對圖像進行變形操作,以修正圖像畸變或者調整角度,提高識別準確率。數字識別的流程如圖5所示。
1.2.3 避障模塊
A*算法[10]和 TEB(Timed Elastic Band) 算法是兩種常見的路徑規劃與控制算法,可與激光雷達(LIDAR) 相結合,用于小車導航[5]和避障等任務。A*算法是一種啟發式搜索算法,可用于為小車找到從起點到終點的最短路徑。它結合了廣度優先和最優路徑搜索,使用代價函數(通常含有實際代價和啟發式代價)來評估當前節點到目標節點的成本。在實際應用中,激光雷達可以通過測量周圍環境中的障礙物,將這些信息輸入地圖網格(Grid Map) 或占用網格(Occupancy Grid) 中。隨后可將地圖數據提供給 A*算法,用以生成高效的路徑規劃,實現小車在有障礙物的環境中的導航。TEB (Timed Elastic Band) 算法是非線性軌跡優化算法,它通過優化小車當前軌跡在執行過程中產生的成本來定義合適的路徑。TEB 算法強調實時性和動態性,針對時間和運動約束都有考慮。與 A*算法相比,TEB算法[11]可以處理連續和動態環境中的路徑規劃和控制問題。激光雷達在這種情況下可以提供實時的、連續的障礙物檢測和定位數據,以便 TEB 算法更好地規劃小車在動態環境中的運動軌跡,并實施有效的避障。激光雷達可以為 A*算法和 TEB 算法提供環境中障礙物的信息,這使得小車能夠根據算法生成的路徑安全地導航。A*算法專注于在靜態環境中找到最短路徑[6],而 TEB 算法在動態環境中處理連續和實時路徑優化問題,以實現小車的實時軌跡優化和避障。
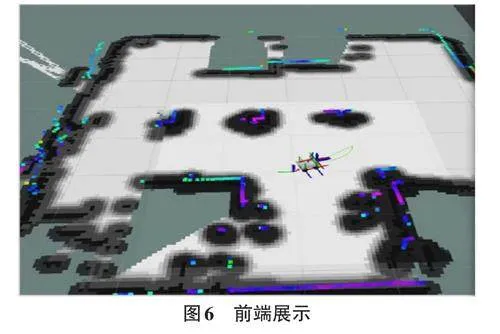
1.2.4 前端展示
該模塊通過rviz的“2D Navi Goal”工具完整的地圖。當用戶點擊病房號所在的位置后,小車會從藥房到達該病房,并在地圖上 形成實時軌跡路線。通過這種方式,用戶可以清晰地跟蹤小車的位置和行駛路徑,更好地掌握送藥的進度,具體如圖6所示。
2 系統硬件設計
2.1 主控芯片模塊
智能送藥設備使用4代B型(4B) 樹莓派作為主控芯片。樹莓派4B型在樹莓派3代B 型的基礎上進行了多項重要升級。樹莓派4B配備了更快的 BroadcomBCM2711 處理器,采用quad-core Cortex-A72(ARMv8-A) 64 位設計,主頻為1.5 GHz。樹莓派4B包含兩個USB 3.0接口和兩個USB 2.0接口,而樹莓派3B+只有4個USB 2.0 接口。樹莓派4B提供了 Gigabit Ether?net(千兆以太網),速度是樹莓派3B+(10/100 網絡接口)的10倍左右。
2.2 激光雷達
激光雷達提供了更高程度的距離和角度測量精度,相較于超聲波傳感器表現更為準確。因為激光雷達可以達到厘米乃至毫米級別的精度,并具有較高的空間分辨能力,所以能夠捕捉到更加豐富的細節。這項優勢使其能夠更為精確地定位物體和邊緣,為用戶帶來更全面的環境信息。此外,激光雷達的測量范圍較大,可以覆蓋數十米乃至數百米的距離。在許多環境條件下(包括光照、氣候、表面反射特性等因素),激光雷達[9]展現出較好的測量穩定性。所提供的豐富點云數據不僅包括距離和強度,還包括顏色等信息。因此,在如 3D 建模、地形分析和植被分析等專業領域應用上,激光雷達具有明顯的競爭優勢。借助于激光雷達的強大性能,廣泛應用于無人駕駛、機器人導航、測繪等行業,在不斷地提升現有技術,創新未來的探索中發揮著關鍵作用。后續發展中,激光雷達將持續優化性能并擴大應用范圍,以滿足日益增長的技術需求和市場變化。
2.3 深度相機
深度相機是一種多功能圖像設備,充分利用了其在圖像采集和距離信息獲取方面的優勢。除了捕獲彩色圖像(RGB) 之外,它還能夠實時地檢測物體與攝像頭之間的距離,這種能力損益現實提高了設備的實用性。為了實現這一特性,深度相機采用了先進的技術,為每個像素測量深度值并根據這些值生成精確的深度圖。正因如此,深度相機在物體識別、環境重建、姿態估計等多種應用領域表現出顯著的優越性。由于它可以直接獲取物體距離信息,深度相機被廣泛應用于機器人導航、自動避障等場景,確保精確可靠的距離測量。在現實環境中,深度相機為各類應用提供了豐富的三維空間信息,彌補了傳統相機在空間感知方面的損益現實。這使得深度相機在需要精細空間感知的場景中具有顯著的競爭優勢。與此同時,深度相機在許多具有挑戰性的情況下仍能表現出較好的容錯性。例如,在處理復雜環境中的圖像失真或遮擋問題時,深度相機仍然可以獲取相對準確的深度信息。這種容錯能力使得深度相機在各種不利條件下依然能夠提供可靠的空間信息。隨著科技的不斷進步和人們對更先進應用技術的需求日益增長,深度相機在未來可能會在更多領域發揮重要作用。無論是對現有技術進行改進,還是在新的應用領域中進行探索,深度相機都有望帶來更高效、更創新的體驗。
3 系統實現
3.1 圖像預處理
OpenCV(Open Source Computer Vision Library) 是一個開源的計算機視覺庫,提供了豐富的圖像處理和計算機視覺功能[8]。在圖像預處理中,OpenCV 可以進行多種操作,以改善圖像質量和為后續算法做準備。以下是一些典型的圖像預處理操作,分為兩部分:
第一部分:基本圖像處理
讀取和保存圖像:使用 OpenCV 讀取圖像文件,對圖像的修改后,可以將其保存到指定的文件中去。圖像的縮放、旋轉和翻轉:對圖像進行尺寸縮放、旋轉到特定角度以及水平和垂直翻轉。直方圖均衡化:通過調整圖像的直方圖來增強圖像對比度,使得圖像中的顏色和灰度更均勻分布,以改善圖像質量。圖像閾值處理:使用閾值處理將圖像轉換為二值圖像(黑白圖像)
第二部分:高級圖像處理
模糊與平滑:通過卷積運算,采用高斯模糊方法來降低圖像噪聲,幫助抑制圖像中的高頻噪聲成分,改善圖像質量。邊緣檢測:使用Sobel算法,找到圖像中的邊緣信息,更好地識別圖像中的對象和特征。形態學變換:通過膨脹操作,去除噪聲、連接斷裂區域和分離重疊區域。模板匹配和特征點匹配:可以通過關鍵點匹配來查找圖像中的特征。
3.2 CNN 數字圖像處理
卷積神經網絡(CNN) [7]是一種先進的深度學習方法,廣泛應用于圖像處理和識別任務。與其他算法相比,CNN可以有效提取圖像的局部特征并進行逐層抽象,使得它能夠應對數字旋轉、形變等挑戰。典型的CNN 模型,如本文所使用的、共包含15 層(含輸入層),具體可以分為特征提取和多分類輸出兩個部分。在特征提取方面,所采用的模型使用了四個卷積層和兩個最大池化層來挖掘圖像的局部特征。卷積層具體地,依次使用了兩個5×5和兩個3×3的濾波器進行卷積操作,加上ReLU激活函數以提高表達能力。為了加速模型收斂并防止過擬合,每個卷積層后都引入了批標準化操作。此外,模型在每兩個卷積層之間加入了一個最大池化層,以實現特征下采樣并保持特征不變性。在多分類輸出部分,CNN模型采用了兩個全連接層,同時使用Dropout層來避免過擬合。這兩個全連接層之間的Dropout層可以提高網絡泛化能力。完成特征提取之后,模型通過Flatten層將后處理結果展平并輸入全連接層。最終,給出各類別的預測概率。CNN對于圖像處理任務具有顯著的效果,特別在圖像特征提取和多分類輸出方面表現優異。通過設計合理的網絡結構和優化方法,能夠在各種計算機視覺任務中獲得高準確率。隨著深度學習技術不斷發展,CNN將在未來圖像處理、識別等領域發揮更大的作用。
4 系統測試與結果分析
4.1 模型評估
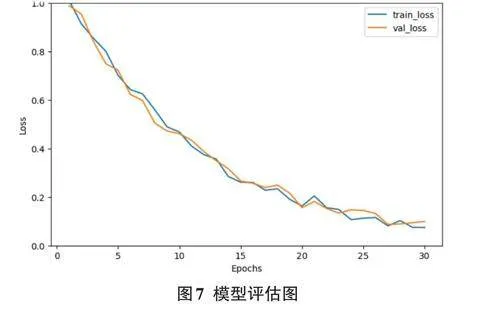
模型在訓練數據上的損失值為 0.0279,準確率達到了 0.9921。這意味著該模型在訓練集上的性能相當出色,可以很好地擬合訓練數據。在驗證數據中,損失值為 0.0291,且準確率為 0.9945。這進一步證明了模型在驗證集上同樣具有很好的表現,展示了優秀的泛化能力并可以很好地應對新數據。模型評估結果如圖7所示。
4.2 實驗測試
實驗測試結果如表 1 所示。
送達時間均小于58 s,綜上,設備的測試結果符合基本要求。
5 結論
智能送藥設備采用了、數字識別、自動導航算法、避障算法等技術,可以提高醫療服務質量、降低醫療成本等方面的問題。它將傳統的醫療服務方式進行了升級,實現了智能化、高效化、安全化的送藥服務,對于提高醫療服務水平,推動醫療行業現代化具有重要意義。
