火災現場的救援路徑智能調度技術研究
2024-12-17 00:00:00田茂剛
中國新技術新產品 2024年7期

摘 要:針對火災現場救援工作情況復雜的問題,該文提出了一種基于臨近信息融合的深度學習路徑規劃方法。從不同路徑的行駛線速度和角速度出發,為救援車輛的路徑調度構建評價函數。救援車輛自身坐標系下的動態窗口內信息,構建了臨近信息融合的路徑規劃方法框架。在該框架下,6類信息經過四層卷積和五層連接的深度學習處理,生成調整評價函數的關鍵參數。試驗結果表明,該方法規劃出的路徑更優、救援車輛的行進效率更高,可以更好地完成救援工作。
關鍵詞:火災現場;救援路徑;智能調度;救援調度試驗
中圖分類號:X 951" " " " " " " 文獻標志碼:A
大型火災現場具有障礙物多、情況復雜的特點,因此很難有效展開救援工作,從而降低了救援效率,影響救援效果[1]。在這樣的情況下,實現救援目標的關鍵是從復雜多變的環境中合理地規劃最高效的救援路徑。采用智能調度技術來選擇救援路徑并進行優化是一種有效的策略[2]。大型火災現場的地圖一般分為2種情況,一種是全局地圖信息已知,一種是全局地圖信息未知、局部地圖信息已知。全局地圖信息已知,例如大型商場、廠房區域,因為有建設施工圖紙,所以它們的區間結構和全局地圖信息都是已知的[3]。但是,當火災發生后,突發情況導致的未知因素、人群逃逸或疏散導致的混亂,也會使全局信息大部分變為未知。因此,僅有局部地圖信息已知、救援車輛邊行進邊更新地圖信息是更常見的情況。本文以此為出發點,提出一種基于臨近信息的局部環境內救援路徑的調度算法,旨在更好地指導救援車輛前進完成救援工作。
1 救援路徑的智能調度方法設計
1.1 動態窗口局部規劃方法
在實際情況下,救援車輛面對未知環境進行局部路徑規劃是非常常見的手段。動態窗口法是一種較為有效的局部路徑規劃方法,它以救援車輛本體為參照坐標系,并在這個坐標系下構建一個范圍合適的窗口。在窗口中包括環境信息和救援車輛自身信息,通過窗口函數配置,函數優化實現局部路徑規劃。
在動態窗口規劃方法下,窗口內可供救援車輛選擇的路徑有多條。選擇不同的路徑,救援車輛將形成不同的速度大小和速度方向以及不同的線速度和角速度。因此,這里構建一個評價函數,將對應不同路徑的線速度和角速度作為優化評價函數的關鍵參數,如公式(1)所示。
L(v,ω)=e(α·h(v,ω)+β·d(v,ω)+γ·(v,ω))
(1)
式中:v為救援車輛選擇路徑對應的線速度;ω為救援車輛選擇路徑對應的角速度;L(v,ω)為路徑規劃所用的評價函數;h(v,ω)為救援車輛選擇路徑所對應的方向函數;d(v,ω)為救援車輛選擇路徑所對應的與障礙物關系的距離函數;(v,ω)為救援車輛當前速度與最大速度之間的關系函數;α、β、γ為3個函數的權重系數;e(·)為執行歸一化處理。
根據公式(1),可以設定評價函數的約束條件解的集合,如公式(2)所示。
(2)
式中:vmin為救援車輛的最小線速度;vmax為救援車輛的最大線速度;ωmin為救援車輛的最小角速度;ωmax為救援車輛的最大角速度;v為救援車輛選擇路徑對應的線速度 ;ω 為救援車輛選擇路徑對應的角速度 。
根據窗口內障礙物信息,可以進一步設定評價函數的容許解的集合,如公式(3)所示。
(3)
式中:為救援車輛線速度對應的加速度;為救援車輛角速度對應的加速度。
根據救援車輛的自身條件,其評價函數的可達解的集合,如公式(4)所示。
(4)
根據上述各解集,動態窗口規劃方法得到的解,需要滿足下述條件,如公式(5)所示。
LR(v,ω)=LS(v,ω)∩LA(v,ω)∩LD(v,ω) " " " " (5)
1.2 臨近信息融合方法框架設計
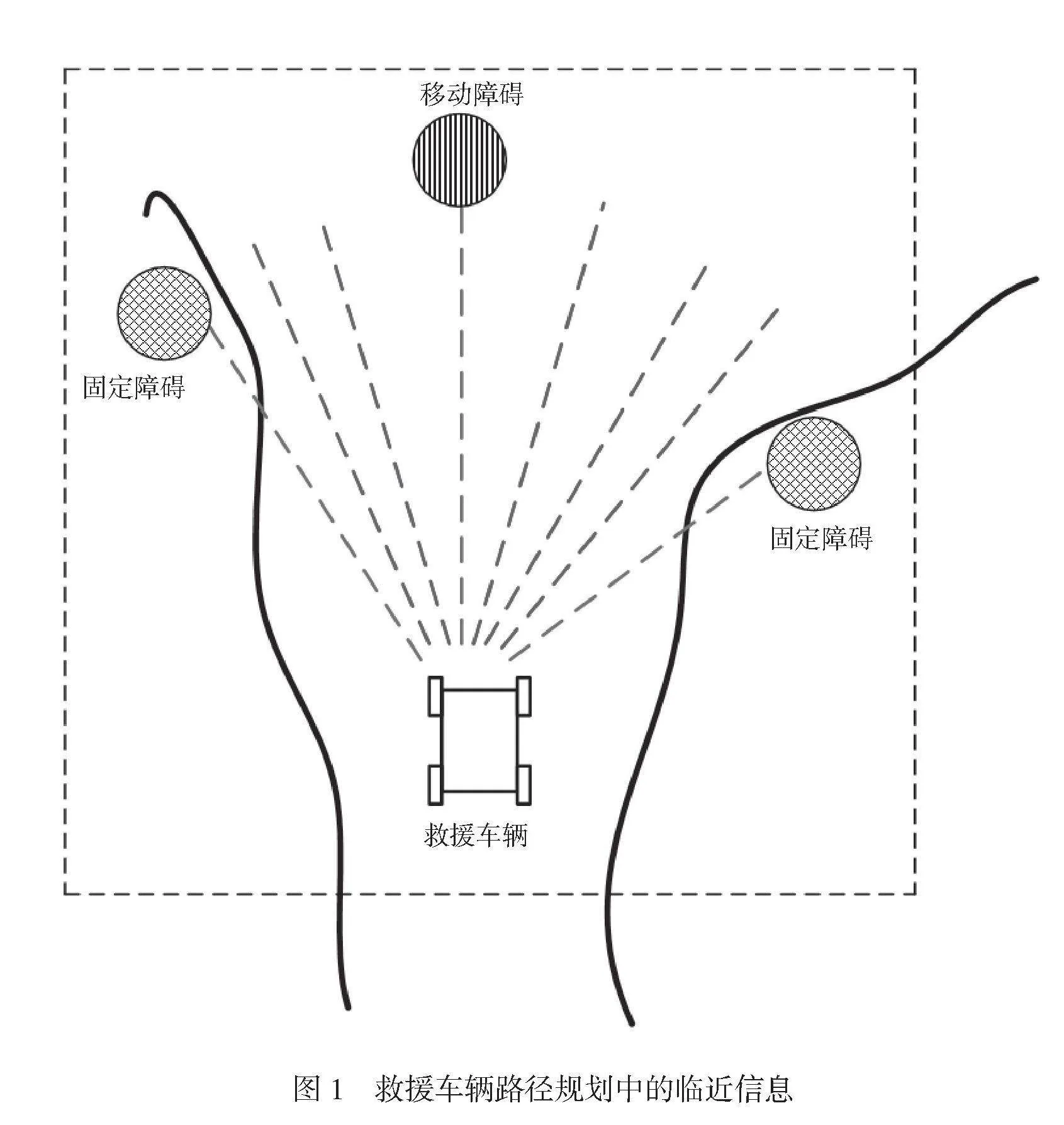
在傳統的動態窗口規劃方法下,更多地考慮了救援車輛前方可能路徑的相關參數,例如速度、加速度等。但實際上影響救援車輛路徑規劃的還有很多其他因素,例如已經走過的歷史路徑信息、局部地圖中的固定障礙物信息、突然出現的移動障礙物信息等。救援車輛路徑規劃中的臨近信息如圖1所示。
圖1中,黑色的粗實線為可行駛區域的邊界,連通障礙物的虛線為因障礙物存在無法選擇的路徑,其他虛線為可供選擇,并且可以行駛的路線,斜網格剖面線的圓圈為固定障礙物,豎直條紋剖面線的圓圈為可移動的障礙物,黑色虛線框為路徑規劃方法給救援車輛配置的動態窗口。
因為是局部路徑規劃,所以動態窗口外的信息不在考慮范圍內。動態窗口內的信息是復雜多樣的,這些都應該成為路徑規劃的判據信息。顯然,在傳統的動態窗口規劃方法的評價函數內,同時容納這些信息是難以做到的。
但是,隨著深度學習網絡的出現,復雜信息的計算融合以及根據復雜判據生成結論都成為可能,這也是本文構建臨近信息融合路徑規劃方法的理論依據。
綜合考慮救援車輛動態窗口內含有的信息,結合深度學習網絡,對公式(1)的評價函數中的關鍵參數進行優化,從而形成更合理的路徑規劃結果。本文給出臨近信息融合的深度學習方法框架。
深度學習網絡中一共包括4個卷積層和5個全連接層,6類臨近信息納入輸入層的相應位置,經過卷積層和全連接層的一系列處理、完成訓練學習和深度計算后,生成評價函數的關鍵控制參數,作為輸出。
6類臨近信息分別為救援車輛信息、局部邊界信息、供選擇的路徑信息、歷史的路徑信息、固定障礙信息以及移動障礙信息。3個關鍵輸出參數分別為?α、?β、?γ。
在4個卷積層中,每層的卷積核和步長有輕微調整和變化。在5個全連接層中,前3個使用了360個神經元,后2個使用了180個神經元。
2 試驗結果與分析
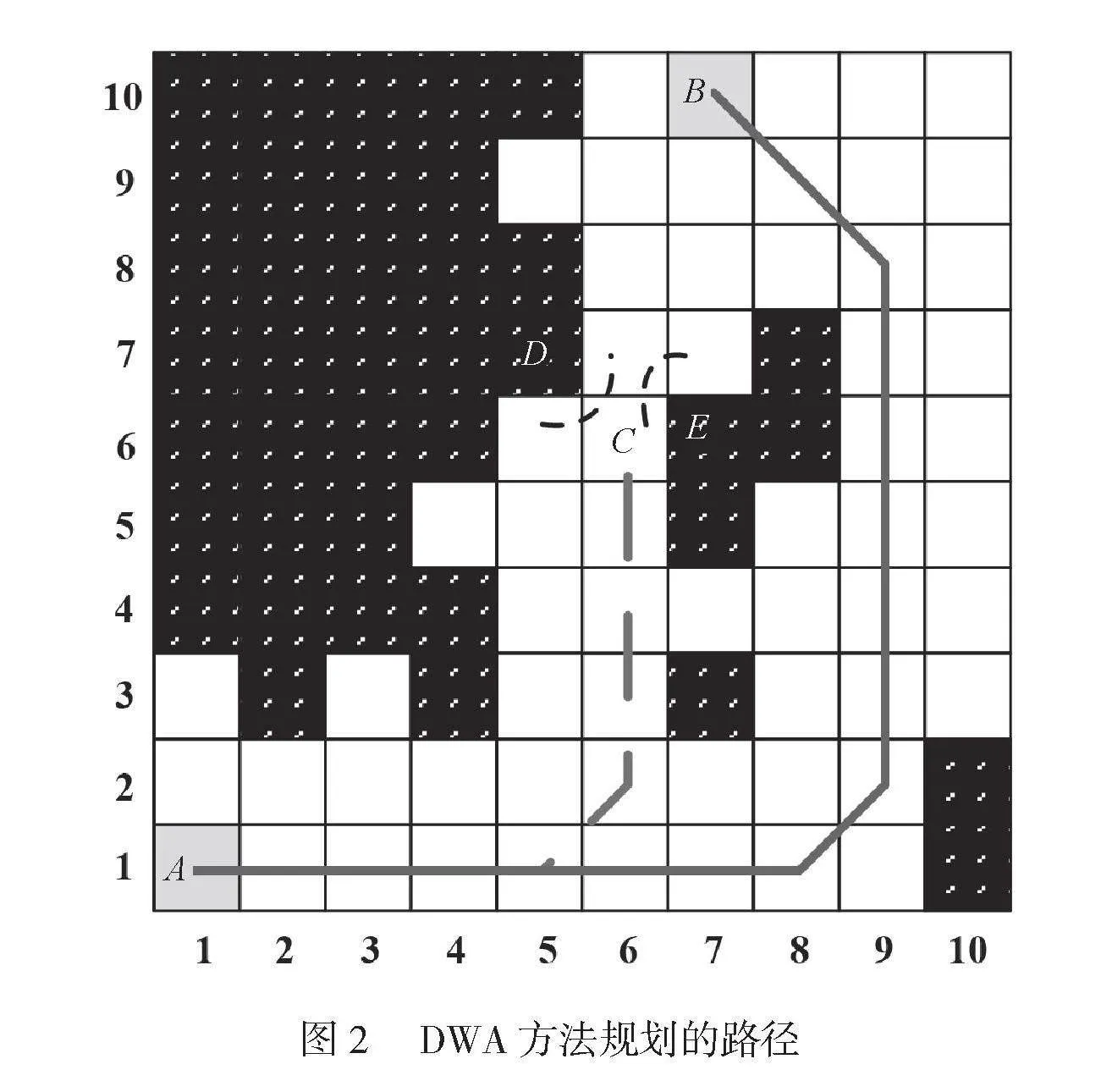
在前面的工作中,針對救援車輛動態窗口路徑規劃方法進行改進,不僅充分考慮窗口內各種臨近信息,而且運用深度學習網絡,將這些信息融合,形成更準確的路徑優化結果,為救援車輛規劃更合理、高效的運行路徑。接下來,通過試驗驗證該方法的有效性。在1個10×10柵格的地圖內,首先按照傳統的動態窗口法(DWA)進行路徑規劃,結果如圖2所示。
在圖2中,救援車輛配置的動態窗口內包括10×10個柵格,橫向寬度為10個柵格、縱向寬度也為10個柵格。黑色柵格為固定障礙區域,救援車輛無法通行。白色柵格為路徑可選擇的區域,機器人可以通行。
救援車輛的出發點在A點的柵格,目標點在B點的柵格。DWA算法為救援車輛規劃了2條可選擇路徑,其中由A—C—B的路徑是最短的路線,如圖2中的虛線。由于DWA算法具有局限性,評價函數在計算過程中的參考信息數量不夠豐富,因此,其對C點的情況判斷不夠精確。因為D、E兩點的固定障礙,所形成的斥力區域使可行進的區間被壓縮,采用DWA算法判斷機器人通過此處時不安全,所以選擇了從右側的繞行,如圖2中的實線所示。這樣的路徑規劃結果大大降低了救援車輛的行進效率。
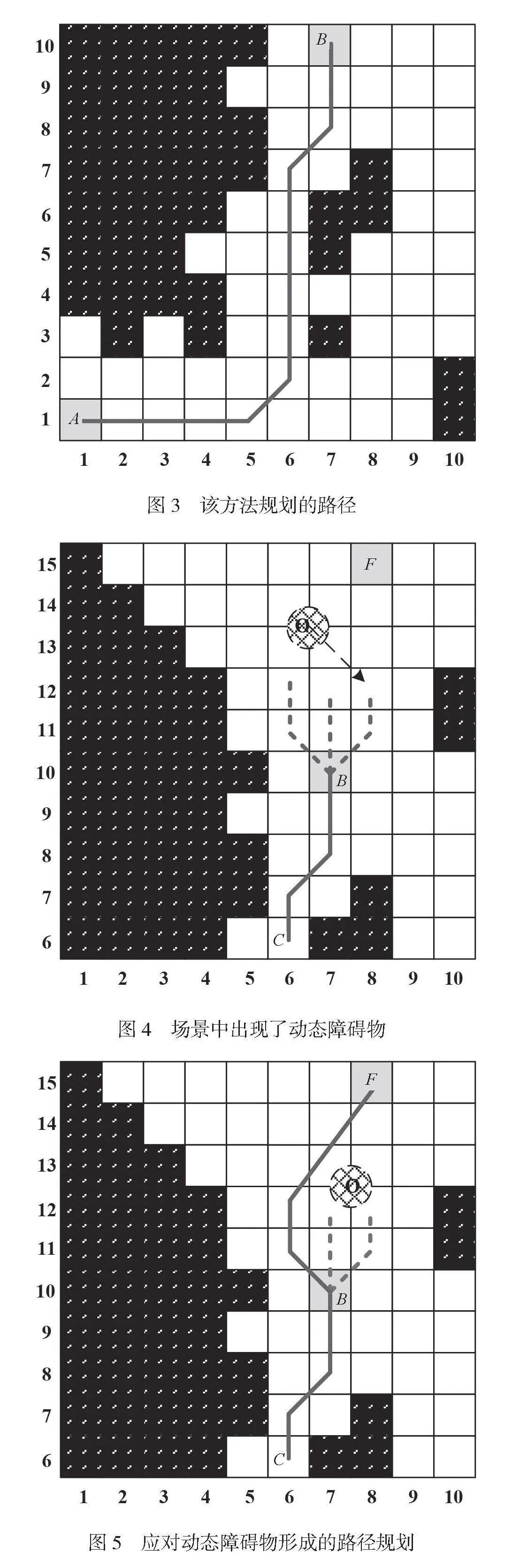
在同樣的局部地圖場景內,按照該方法規劃的路徑如圖3所示。從圖3可以看出,按照該方法選擇最合理的路徑,從A到B。與圖2的規劃結果相比,通過本文方法規劃的路徑可以精確地判斷出最窄區域不會對救援車輛行進造成影響,從而選擇了更短的行進路徑,提高了效率。
進一步觀察該方法遇到動態障礙物時的性能,試驗結果如圖4和圖5所示。
如圖4所示,救援車輛在到達B點后繼續前進,新的局部路徑規劃目標點是F。但是,在救援車輛的行進方向上,出現了一個動態障礙物O,即網格線剖分的虛線圓。在這種情況下,算法初步規劃出3條軌跡,在圖5中用3條虛線表示。
圖5中,隨著障礙物移動,該方法最終給救援車輛規劃出的軌跡,如圖中的粗實線所示。而另外2條可選擇路徑則因為障礙物位置改變,最終被放棄,在圖中用粗實線表示。這組試驗結果說明該方法綜合考慮了各類臨近信息,并且能夠根據動態障礙物的移動趨勢,更準確地判斷可行路徑。
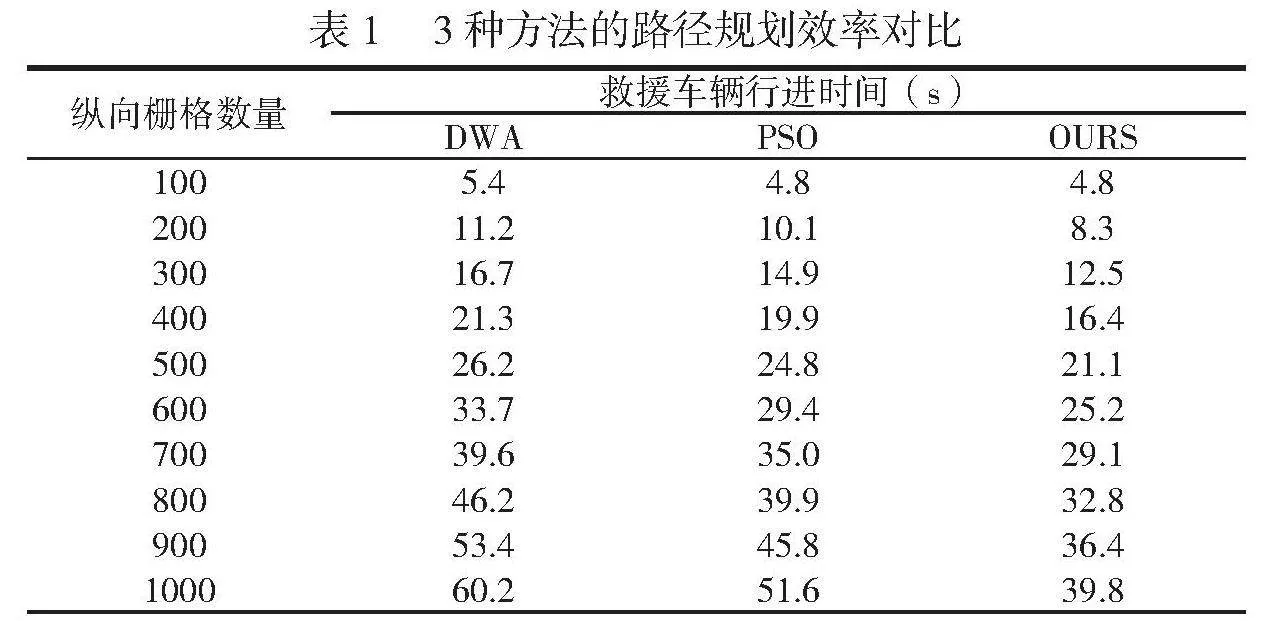
為了形成與該方法的性能對比,選擇動態窗口規劃方法(DWA)、粒子群規劃方法(PSO)作為對比方法,通過延伸局部地圖的長度來觀察3種方法的路徑規劃性能,其結果見表1。
表1 3種方法的路徑規劃效率對比
縱向柵格數量 救援車輛行進時間(s)
DWA PSO OURS
100 5.4 4.8 4.8
200 11.2 10.1 8.3
300 16.7 14.9 12.5
400 21.3 19.9 16.4
500 26.2 24.8 21.1
600 33.7 29.4 25.2
700 39.6 35.0 29.1
800 46.2 39.9 32.8
900 53.4 45.8 36.4
1000 60.2 51.6 39.8
從表1中的對比結果可以看出,隨著地圖不斷擴大,3種方法規劃的路徑所需要的行進時間都在不斷增加,但顯然該方法所需的時間明顯低于DWA方法和PSO方法。而且,從曲線傾斜態勢來看,該方法所需的時間曲線有下挫趨勢,表明隨著地圖不斷擴大,該方法所需的時間正在不斷減少,這進一步表明該方法規劃的路徑更佳、效率更高。
3 結論
在火災現場整體環境信息未知的情況下,局部路徑規劃方法對救援車輛的準確導航具有十分重要的意義。本文結合動態窗口規劃方法,充分考慮各類臨近信息,在深度學習框架下進行融合學習,從而構建出一種新的救援車輛智能調度方法。首先,從不同路徑的行駛線速度和角速度出發,為救援車輛的路徑規劃構建了評價函數。其次,基于救援車輛自身坐標系下的動態窗口內信息,構建了臨近信息融合的路徑規劃方法框架。最后,救援車輛信息、局部邊界信息、供選擇的路徑信息、歷史的路徑信息、固定障礙信息、移動障礙信息同時作為輸入,經過四層卷積和五層連接的深度學習處理,生成調整評價函數的關鍵參數。試驗結果表明,該方法可以更準確地評價固定障礙對可行區域是否安全的影響,從而可以規劃出更短的路徑。通過對動態障礙物的運動趨勢預判,本文方法可以規劃出安全性更高的路徑。與其他方法的比較結果也顯示,該方法規劃出的路徑更優、救援車輛的行進效率更高,可以達到對火災現場更好的救援效果。
參考文獻
[1]張煜東,吳樂南,王水花,等.一種基于時延PCNN的最短路徑算法用于火災救援調度[J].物流技術,2019(12):3.
[2]蔣建安.基于消防高空瞭望系統的滅火救援調度指揮體系[J].消防科學與技術,2021,30(5):4.
[3]陳友榮,盧俊杰,曾江波,等.權衡預測時間和偏離度的消防車輛救援調度算法[J].計算機應用與軟件,2022,39(11):264-271.