地鐵電氣系統故障智能檢測方法研究
2024-12-21 00:00:00李雪冬
中國新技術新產品 2024年16期
摘 要:針對地鐵電氣系統的故障檢測問題,本文提出了一種智能化的檢測方法。這種檢測方法依托神經網絡結構,將隱含層擴充為數量豐富的大緩沖池結構,從而具有更好的學習性能和逼近性能。以10組不同類型的地鐵電氣故障數據作為輸入,展開故障檢測方法的性能測試試驗。測試結果表明,1000組訓練數據可以使大緩沖池網絡達到更好的收斂效果,對地鐵電氣系統故障檢測的準確率可以達到95.6%以上。
關鍵詞:地鐵電氣系統;故障檢測;智能檢測;故障分類
中圖分類號:U 231 文獻標志碼:A
隨著科學技術不斷進步和發展,電氣自動化在地鐵中的應用也越來越成熟和普遍。電氣自動化的發展使地鐵系統的安全性更高[1]。地鐵是大型的交通工具,乘坐人數眾多,安全問題非常重要。傳統的地鐵操作需要人工控制,容易出現人為的錯誤。而利用電氣自動化技術可以實現地鐵列車的自動駕駛和自動控制,大大降低了人為錯誤的可能性。電氣自動化的發展使地鐵系統的運行更高效和節能[2]。地鐵系統通常需要在復雜的路線中運行,而電氣自動化技術可以實現列車的精確控制和調度,縮短了車輛之間的間隔時間和運行時間,提高了地鐵系統的運行效率。電氣自動化的發展使地鐵系統在安全性、效率和乘客體驗方面都得到了提升,成為了現代化城市重要的公共交通工具[3]。在未來,隨著科技不斷創新和推進,電氣自動化技術在地鐵中的應用將會更廣泛和深入。但是,地鐵電氣系統也會面臨多種故障的影響,從而影響地鐵的安全運行。因此,本文提出一種智能化的檢測方法,用于地鐵電氣系統的故障檢測。
1 地鐵電氣系統的故障分析
電氣系統在整個地鐵系統中占據十分重要的地位,發揮能量供給、控制調整等作用。但是地鐵電氣系統的復雜性也使其可能出現多種故障。下面,就從地鐵電氣系統的故障產生原因和分類類型2個方面進行分析。
1.1 地鐵電氣系統的故障原因
1.1.1 設備老化或故障
地鐵列車的電氣部件,例如電機、電纜、開關、接觸器等設備,在長時間的使用中可能會出現老化或故障,導致電氣系統出現故障。
1.1.2 環境因素
在運營過程中,地鐵列車暴露在不同的環境中。例如高溫、寒冷、濕度大、污染等環境因素可能會對電氣設備造成損傷,導致電氣故障。
1.1.3 操作問題
列車司機或維修人員在操作過程中可能會因誤操作導致發生電氣故障,例如未正確操作開關、忘記關閉某些設備等。
1.1.4 當地電網供電問題
地鐵列車在運營過程中需要依賴當地電網進行供電,如果當地電網出現電力波動或停電等問題,也可能會導致發生電氣故障。
1.2 地鐵電氣系統的故障類型
地鐵列車電氣故障的類型種類繁多,以下是常見的故障類型。1)電機故障。地鐵列車電機故障主要表現為電機失速、振動、響聲大等,影響列車行駛安全和舒適性。2)電纜故障。地鐵列車電纜故障可能是由電纜損壞、接頭短路或斷開等原因引起的。3)開關失靈。地鐵列車開關失靈可能會導致電氣系統部分或全部失效,嚴重影響列車的運行安全。4)接觸器松動、斷路或粘連。地鐵列車接觸器故障常常會導致電氣系統某些設備無法正常工作。5)電氣隔離故障。地鐵列車電氣隔離故障可能會導致部分電氣設備受到干擾,影響列車的運行安全。
2 地鐵電氣系統故障的智能化檢測方法
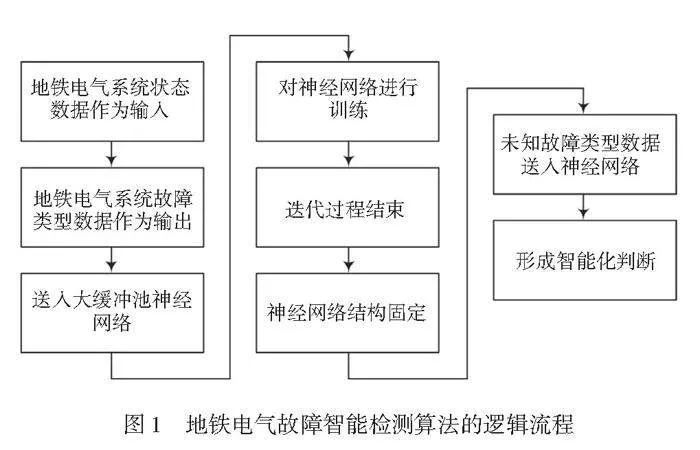
為了實現地鐵電氣系統故障的智能化檢測,構建檢測算法的思路如下:以具有大緩沖池結構的神經網絡為核心,將地鐵電氣故障狀態數據作為輸入、地鐵電氣故障類型數據作為輸出,對神經網絡進行訓練,當迭代誤差足夠小時,將神經網絡的結構固定下來,對未知故障類型的狀態數據進行判斷檢測。這一方法的流程如圖1所示。
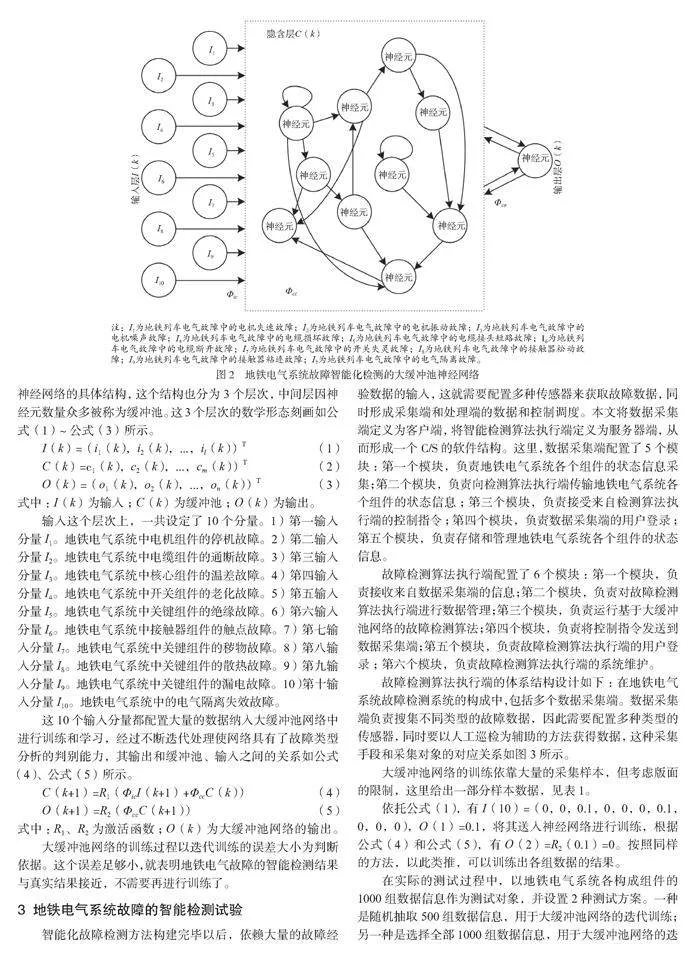
根據前面的分析可知,地鐵電氣故障包括多種類型,例如電機故障、電纜故障、開關失靈、接觸器松動斷路或粘連、電氣隔離故障等。這些故障有的又可以進行進一步細分,在本文中就細分為10類常見故障類型,然后將這些故障類型對應的數據送入學習網絡進行訓練,以形成故障的智能化檢測結果。這里的學習網絡選擇了一種大緩沖池的神經網絡,與一般的BP網絡相比,這種網絡雖然也是三層結構,但中間層設置了數量更豐富的神經元,具有能力更強大的緩沖池的效果,此學習網絡的結構如圖2所示。
圖2給出的是地鐵電氣系統故障智能化檢測的大緩沖池神經網絡的具體結構,這個結構也分為3個層次,中間層因神經元數量眾多被稱為緩沖池。這3個層次的數學形態刻畫如公式(1)~公式(3)所示。
I(k)=(i1(k),i2(k),...,il(k))T (1)
C(k)=c1(k),c2(k),...,cm(k))T (2)
O(k)=(o1(k),o2(k),...,on(k))T (3)
式中:I(k)為輸入;C(k)為緩沖池;O(k)為輸出。
輸入這個層次上,一共設定了10個分量。1)第一輸入分量I1。地鐵電氣系統中電機組件的停機故障。2)第二輸入分量I2。地鐵電氣系統中電纜組件的通斷故障。3)第三輸入分量I3。地鐵電氣系統中核心組件的溫差故障。4)第四輸入分量I4。地鐵電氣系統中開關組件的老化故障。5)第五輸入分量I5。地鐵電氣系統中關鍵組件的絕緣故障。6)第六輸入分量I6。地鐵電氣系統中接觸器組件的觸點故障。7)第七輸入分量I7。地鐵電氣系統中關鍵組件的穢物故障。8)第八輸入分量I8。地鐵電氣系統中關鍵組件的散熱故障。9)第九輸入分量I9。地鐵電氣系統中關鍵組件的漏電故障。10)第十輸入分量I10。地鐵電氣系統中的電氣隔離失效故障。
這10個輸入分量都配置大量的數據納入大緩沖池網絡中進行訓練和學習,經過不斷迭代處理使網絡具有了故障類型分析的判別能力,其輸出和緩沖池、輸入之間的關系如公式(4)、公式(5)所示。
C(k+1)=R1(ΦicI(k+1)+ΦccC(k)) (4)
O(k+1)=R2(ΦccC(k+1)) (5)
式中:R1、R2為激活函數;O(k)為大緩沖池網絡的輸出。
大緩沖池網絡的訓練過程以迭代訓練的誤差大小為判斷依據。這個誤差足夠小,就表明地鐵電氣故障的智能檢測結果與真實結果接近,不需要再進行訓練了。
3 地鐵電氣系統故障的智能檢測試驗
智能化故障檢測方法構建完畢以后,依賴大量的故障經驗數據的輸入,這就需要配置多種傳感器來獲取故障數據,同時形成采集端和處理端的數據和控制調度。本文將數據采集端定義為客戶端,將智能檢測算法執行端定義為服務器端,從而形成一個C/S的軟件結構。這里,數據采集端配置了5個模塊:第一個模塊,負責地鐵電氣系統各個組件的狀態信息采集;第二個模塊,負責向檢測算法執行端傳輸地鐵電氣系統各個組件的狀態信息;第三個模塊,負責接受來自檢測算法執行端的控制指令;第四個模塊,負責數據采集端的用戶登錄;第五個模塊,負責存儲和管理地鐵電氣系統各個組件的狀態信息。
故障檢測算法執行端配置了6個模塊:第一個模塊,負責接收來自數據采集端的信息;第二個模塊,負責對故障檢測算法執行端進行數據管理;第三個模塊,負責運行基于大緩沖池網絡的故障檢測算法;第四個模塊,負責將控制指令發送到數據采集端;第五個模塊,負責故障檢測算法執行端的用戶登錄;第六個模塊,負責故障檢測算法執行端的系統維護。
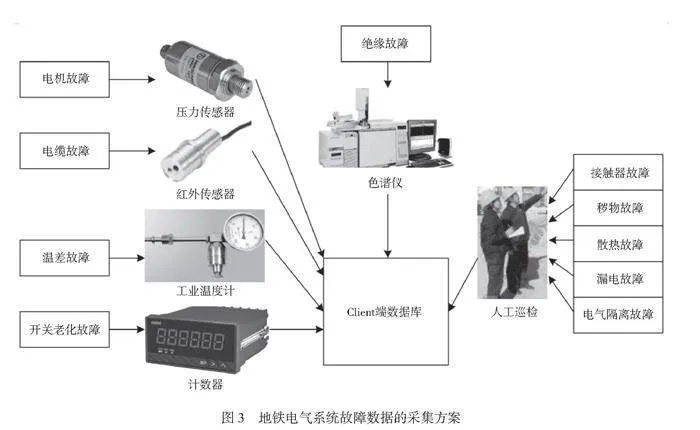
故障檢測算法執行端的體系結構設計如下:在地鐵電氣系統故障檢測系統的構成中,包括多個數據采集端。數據采集端負責搜集不同類型的故障數據,因此需要配置多種類型的傳感器,同時要以人工巡檢為輔助的方法獲得數據,這種采集手段和采集對象的對應關系如圖3所示。
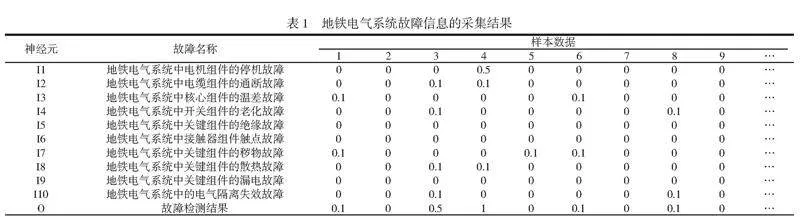
大緩沖池網絡的訓練依靠大量的采集樣本,但考慮版面的限制,這里給出一部分樣本數據,見表1。
依托公式(1),有I(10)=(0,0,0.1,0,0,0,0.1,0,0,0),O(1)=0.1,將其送入神經網絡進行訓練,根據公式(4)和公式(5),有O(2)=R2(0.1)=0。按照同樣的方法,以此類推,可以訓練出各組數據的結果。
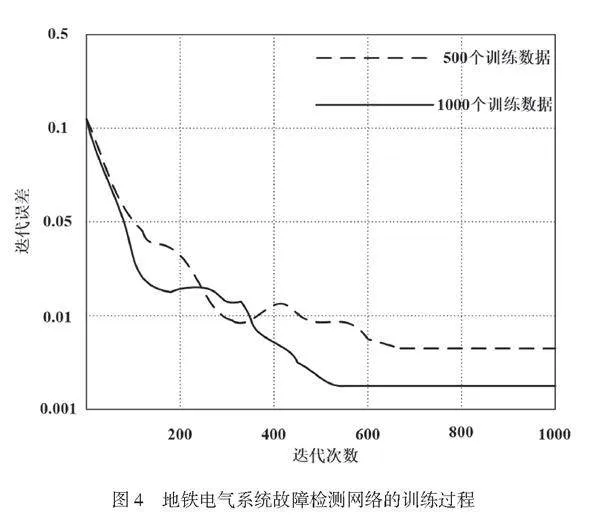
在實際的測試過程中,以地鐵電氣系統各構成組件的1000組數據信息作為測試對象,并設置2種測試方案。一種是隨機抽取500組數據信息,用于大緩沖池網絡的迭代訓練;另一種是選擇全部1000組數據信息,用于大緩沖池網絡的迭代訓練。訓練過程的結果如圖4所示。
測試過程顯示,測試集合的數據越多,大緩沖池網絡的迭代訓練效果更好,其收斂的迭代誤差更小并且保持穩定。這樣訓練后的網絡用于地鐵電氣系統的真實故障的檢測,不僅智能化特征、自動化效率高,而且檢測結果準確率高,達到95.6%以上。
4 結語
電氣系統在整個地鐵系統中占據十分重要的地位,發揮能量供給、控制調整等作用。但是地鐵電氣系統的復雜性也使其可能出現多種故障。本文對地鐵電氣系統的故障原因和類型進行分析,從而構建了一種基于大緩沖池網絡的智能化故障檢測方法。大緩沖池網絡的輸入為常見的故障類型數據,分別對應10個輸入變量,分別為電機組件的停機故障、電纜組件的通斷故障、核心組件的溫差故障、開關組件的老化故障、關鍵組件的絕緣故障、接觸器組件的觸點故障、關鍵組件的穢物故障、關鍵組件的散熱故障、關鍵組件的漏電故障、電氣隔離失效故障。進一步的測試試驗驗證了大緩沖網絡的收斂性能,也驗證了它對地鐵電氣系統故障檢測的有效性。
參考文獻
[1]穆泓冰,王永利,楊宇鵬.地鐵車輛電氣系統中牽引與輔助供電系統的故障與檢修方法[J].中國設備工程,2023(11):182-184.
[2]楊博.電氣自動化的發展及在地鐵中的應用體會[J].中文科技期刊數據庫(全文版)工程技術,2022,31(10):41-45.
[3]佟國加.地鐵車輛電氣系統中牽引與輔助系統的故障與檢修探究[J].中文科技期刊數據庫(全文版)工程技術,2022,45(1):301-308.
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
汽車維修與保養(2019年7期)2020-01-06 03:30:42
汽車維護與修理(2016年10期)2016-07-10 08:17:41
海峽科技與產業(2016年3期)2016-05-17 04:32:12
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維護與修理(2015年2期)2015-02-28 12:15:39