像甲蟲一樣飛行的小小機器人
2024-12-25 00:00:00田蓉
知識就是力量 2024年12期
許多自然界的生物具備飛行的能力,在它們的啟發下,人們研發出了可以飛翔的仿生機器人。比起固定翼和旋翼,撲翼系統更貼近昆蟲和鳥類的飛行方式,具有更強的隱蔽性、機動性和適應性,噪聲更低,可執行復雜空間任務。

蝙蝠擁有獨特的飛行器官——由柔韌皮膜構成的翼手,而鳥類則擁有長有特殊飛羽的翅膀。要讓機器人像它們一樣在空中自由加速、減速、躍升、轉彎、俯沖、懸停……很容易因結構繁雜而過重,遇到諸多飛行困難。
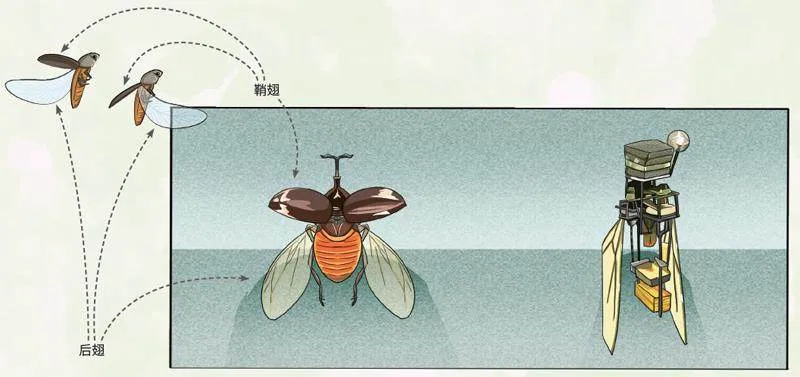
昆蟲的翅是獨立的動力裝置,通過特殊的“連接器”與身體相連。在所有飛行昆蟲中,鞘翅目昆蟲(以下簡稱“甲蟲”)的翅膀機制最為復雜。它們的前翅質地堅硬,形成鞘翅,后翅通常折疊于鞘翅之下。飛行時,它們會完全打開鞘翅,部分展開后翅。
科研人員觀察甲蟲的飛行模式,發現它們的后翅會像彈簧一樣被彈出,還會用鞘翅來被動地調整后翅的位置。通過模仿這一機制,科研人員發明了一種新型撲翼微型機器人——前緣橫梁、翅膜和鉸鏈關節組成了機器人的“翅”,并在機器人的“腋窩”處加裝彈性韌帶。

平時,機器人的“翅”呈完全折疊狀態。飛行時,“翅”在電機的驅動下,被迅速彈到可以飛行的位置,順利起飛。同時,還能夠完成空中懸停和降落的動作。
倘若在飛行中發生意外,這種靈巧的飛行機制能讓機器人迅速收回“翅”,免于受損。
這種機制讓微型機器人能更好地在有限或雜亂的空間中移動。未來,它們會被應用到更多場景,甚至飛上太空。
(責任編輯 / 牛一名 美術編輯 / 徐博宇)
