基于改進蟻群算法的物流機器人路徑規劃
2024-12-28 00:00:00龐章耀盧偉江
今日自動化 2024年10期
[關鍵詞]路徑規劃;蟻群算法;三角減枝法;物流機器人;人工勢場引力
[中圖分類號]TP242 ;TP18 [文獻標志碼]A [文章編號]2095–6487(2024)10–0166–03
(6)判斷是否達到最大迭代次數,如達到則輸出最優路徑,否則清空禁忌表TABUk并返回步驟3進行下一次迭代。
(7)對最優路線進行三角剪枝法優化,得到精簡路徑。
3試驗仿真與分析
試驗環境為CPU2.5GHz,處理器為12th Genlnte(lR)Core(TM)i9-12900H,使用MATLABR2016a仿真平臺。
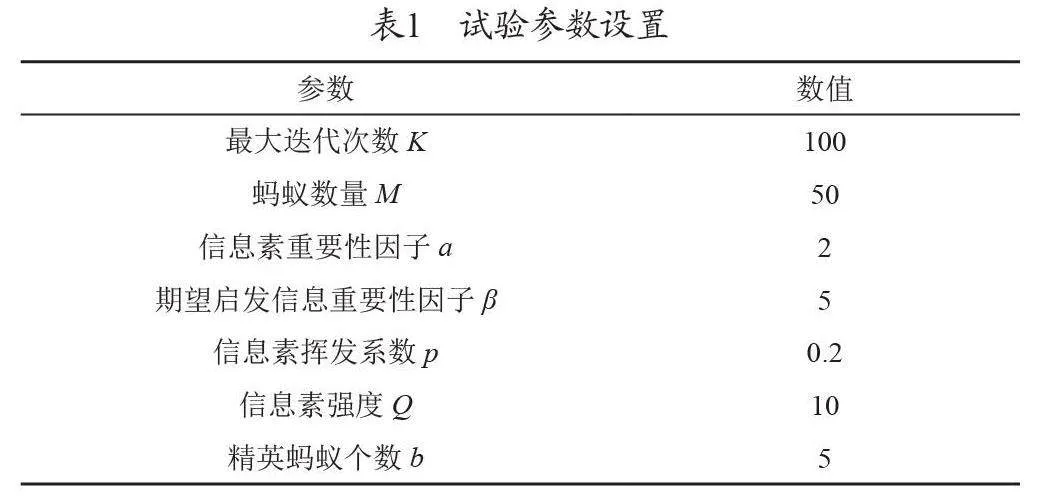
試驗參數設置見表1。
3.120×20仿真結果與分析
試驗結果表明,文章提出的改進蟻群算法僅需6次迭代便能穩定,且最優路徑長度為27.24cm。改進的蟻群算法在路徑評價指標上優于另外兩種算法,表明其能夠更快速地收斂,同時顯著減少了路徑轉彎點的數量。這意味著改進后的蟻群算法在收斂速度和路徑優化方面都表現的更為出色。
3.230×30仿真結果與分析
為了驗證文章改進算法的優越性,在保持各項參數不變的情況下,將傳統蟻群算法及文章改進蟻群算法應用于更加復雜的30×30靜態柵格環境中進行路徑規劃。隨著柵格環境的增大和障礙物數量的增加,規劃的各項指標均呈現不同程度的增加。
試驗結果表明,文章改進的蟻群算法相對于傳統蟻群算法,其路徑長度分別減少了13.29%和11.7%,迭代次數也分別減少了37.5%和25%,而轉彎點數量則分別減少了77.78%和33.33%。因此,文章提出的算法具有明顯優勢,在復雜環境中能夠更有效地規劃出最優路徑,并表現出較強的穩定性和環境適應能力。
4結論
(1)對傳統蟻群算法的啟發函數和信息素更新規則進行了改進,并對路徑的冗余節點進行了處理,對比了該改進算法與傳統蟻群算法在不同復雜程度的柵格環境下的性能指標。結果表明,在收斂效率、尋優能力、轉彎點數量、環境適應能力等方面,文章提出的改進蟻群算法具有一定的優越性。
(2)文章改進的蟻群算法在性能指標上有所提升,但與傳統蟻群算法相比,其運行時間并未縮短。值得注意的是,研究環境僅限于二維靜態柵格,未涉及局部動態避障問題。因此,未來的研究方向將集中在縮短算法運行時間和解決局部動態避障問題上。