沙灘垃圾清潔車的設計
2024-12-31 00:00:00周林建肖順根石首煥林澤琳
機電信息 2024年14期
摘 要:針對當今沙灘環境存在大量垃圾滯留現象所帶來的生態問題,設計一款用于清理沙灘垃圾的沙灘垃圾清潔車。該車最主要功能是實現沙灘垃圾與沙子的有效分離并將沙灘垃圾收集起來。通過對同步帶、同步輪的計算選定裝置所需要的零部件尺寸,并使用SolidWorks軟件對裝置整體進行建模和虛擬裝配,利用Simulation插件對主要零部件進行有限元仿真分析,得出應力圖、位移圖,進而驗證理論設計的合理性及可行性。
關鍵詞:沙灘垃圾清潔車;三維建模;仿真分析
中圖分類號:U469.6+91" " 文獻標志碼:A" " 文章編號:1671-0797(2024)14-0038-04
DOI:10.19514/j.cnki.cn32-1628/tm.2024.14.008
0" " 引言
我國沙灘上常見的垃圾主要有塑料類(占37.37%)、泡沫類(占35.67%)等廢棄物[1-2]。根據美國相關的數據表明,全球每日產生海灘垃圾3 700 t,香煙和塑料袋成為全球海洋環境的頭號“殺手”[3]。這些沙灘垃圾帶來的污染已經給海岸帶和近海生態系統造成了重大壓力,對人類的生存和發展產生了嚴重影響[4]。國內沙灘清潔車研發晚于國外,以理論研究和發明專利為主,市場上多為進口車。
目前,廈門威迪思汽車設計服務有限公司已成功研發兩款清潔車,并完成了樣機試制和試驗[5]。總的來說,我國未來需加強研究和技術投入,以提升沙灘垃圾清潔車產業的競爭力[6]。
1" " 方案設計
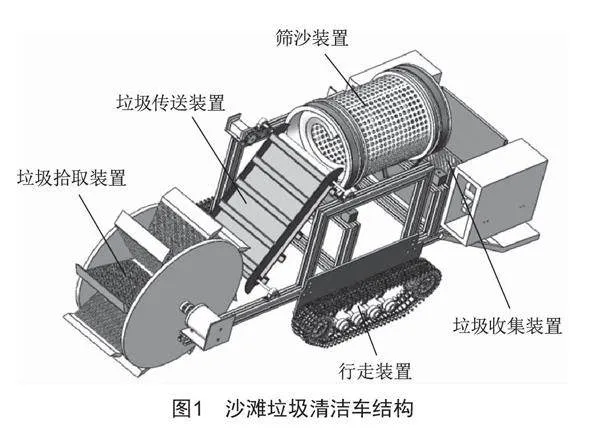
本文設計的沙灘垃圾清潔車結構如圖1所示。該車由垃圾拾取裝置、垃圾輸送裝置、篩沙裝置、垃圾收集裝置、行走裝置組成,以此實現沙灘垃圾與沙子有效分離并將沙灘垃圾集中收集起來的功能。
這五個裝置的設計思路如下:
1)行走裝置。
根據沙灘的地形特點,選取履帶式行走裝置而不是輪胎式行走裝置,因為履帶式行走裝置具有支撐面積大、接地比壓小、凹陷小的優點,在沙灘上具有良好的通過性能。
2)垃圾拾取裝置。
基于沙灘垃圾普遍存在于沙灘表面或略深于沙灘表面以及防止拾取過程中沙灘垃圾掉落的現象,本次設計的垃圾拾取裝置為具有傾斜角的前鏟式且兩側附有擋板的構造。
3)垃圾輸送裝置。
參考傳送帶的工作原理,進一步增加了前側和兩側附有擋板的抬升板,以此實現沙灘垃圾的輸送和防止掉落的功能。
4)篩沙裝置。
參考水泥攪拌車的攪拌筒構造,其內部攪拌槳的螺旋式構造不僅能夠起到輸送的功能,且能夠將沙子攪散。在此基礎上,在滾筒的外圈設計了一定數量的較大孔徑的篩孔。攪拌槳隨滾筒的轉動能將沙灘垃圾表面可能還附帶的一些潮濕的沙子或已經和海水凝結成塊狀的沙子攪散,實現與沙灘垃圾充分的分離,最后經過較大孔徑的篩孔篩除這些攪散的沙子。
5)垃圾收集裝置。
設計了一個抽拉式可再次篩沙的垃圾收集裝置,再次篩沙是為了避免在沙灘垃圾收集時還夾雜一些細沙,為了保障垃圾收集時能最大限度與沙子分離,利用四個凸輪帶動箱體的四根軸使箱體上下運動,使得小篩孔狀的箱體把剩下的細沙篩除。
2" " 同步帶、同步輪的計算
2.1" " 垃圾輸送裝置的同步帶、同步輪的計算
根據垃圾輸送裝置的結構布局和大概需要功率,并查閱網上相關的電動機資料,挑選CH18-
100-3~200三相異步電動機,其額定功率P=100 W,轉速為7~500 r/min。
1)計算設計功率Pd:
Pd=KAP=0.15 kW " (1)
式中:KA為工況系數,假設垃圾輸送裝置每天工作8~10 h,根據《機械設計手冊》的工況系數表得KA=1.5[7]。
2)由電機選型得額定轉速n為7~500 r/min,取n=200 r/min;又由上一步算出設計功率Pd=0.15 kW。根據這兩個數據查閱《機械設計手冊》的模數制同步帶選型圖和圓弧齒同步帶選型圖得模數m=3 mm,帶型節距Pb=3 mm也即圓弧齒同步帶型為3M。
3)為實現傳動加速,假設主動帶輪的轉速是從動同步輪的1/3,則可得傳動比為i=1/3,因此主動帶輪的轉速n1=電機額定轉速n=200 r/min,從動帶輪轉速也即小帶輪轉速n2=600 r/min。根據小帶輪轉速n2=600 r/min以及圓弧齒同步帶型為3M,查閱《機械設計手冊》的小帶輪最小齒數表可得Zmin=10。在帶速和安裝尺寸允許時,小帶輪的齒數Z2盡可能選用最大值,取小帶輪齒數Z2=14。根據假設的傳動比可得大帶輪齒數Z1=42。
4)由大帶輪齒數Z1=42、小帶輪齒數Z2=14,查閱《機械設計手冊》的圓弧齒帶輪直徑表得大帶輪節圓直徑d1≈40.11 mm、小帶輪節圓直徑d2≈13.37 mm。
5)計算同步帶的帶速V:
式中:Lp為圓弧齒帶節線長度,查閱《機械設計手冊》的圓弧齒帶的節線長度表,選取接近的圓弧齒帶節線長度Lp=192 mm。
9)計算總結:
垃圾輸送裝置選用節線長度Lp=192 mm、中心距a=52.21 mm的3M型圓弧齒同步帶;大帶輪節圓直徑d1=40.11 mm、齒數Z1=42,小帶輪節圓直徑d2=
13.37 mm、齒數Z2=14。
2.2" " 篩沙裝置的同步帶、同步輪的計算
根據工作環境為沙灘,篩沙裝置的電動機防護等級應至少為IP54,以確保電動機在一定程度上防水、防塵和防腐蝕。根據篩沙裝置的結構布局和大概需要功率,并查閱網上相關的電動機資料。篩沙裝置挑選6IK200GU-UFT/6GU75K三相異步電動機。
同理可計算得,篩沙裝置選用節線長度Lp=750 mm、中心距a=145.5 mm的3M型圓弧齒同步帶;大帶輪節圓直徑d1=68.75 mm、齒數Z1=72,小帶輪節圓直徑d2=22.92 mm、齒數Z2=24。
3" " 主要零部件的仿真分析
3.1" " 垃圾輸送裝置的垃圾抬升板有限元分析
垃圾輸送裝置的抬升板起到承載和運輸沙灘垃圾的作用,其在傳送帶的運輸過程中,受到的靜應力能否符合安全標準,是確保該裝置正常運行的關鍵。因此需要對其進行靜應力分析并驗證設計的可行性。
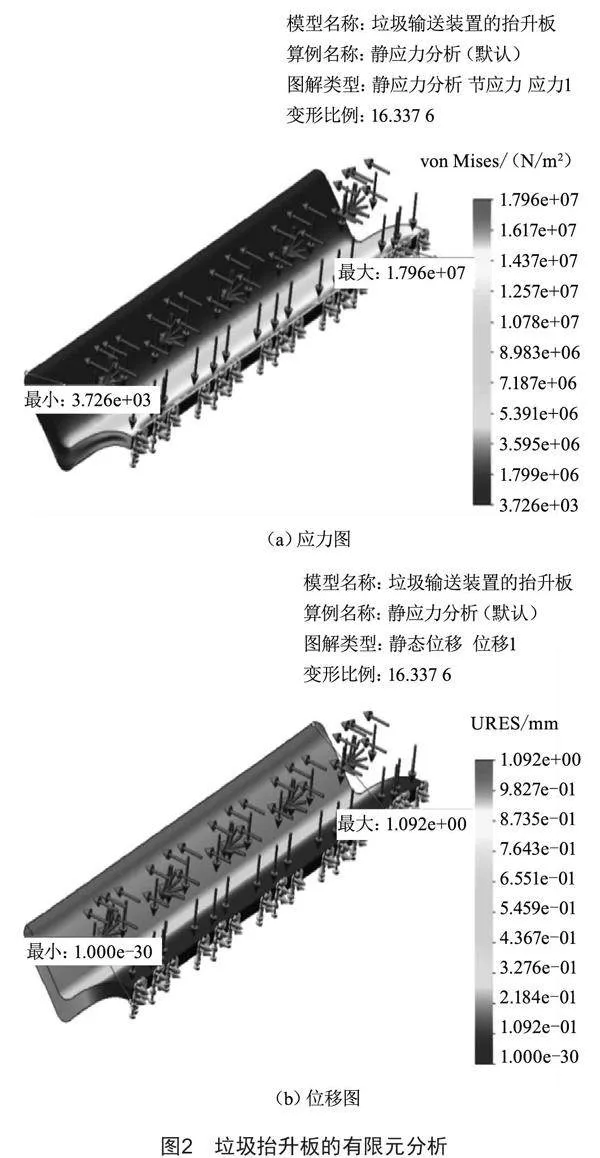
設垃圾輸送裝置的垃圾抬升板每次裝有10 kg的沙和沙灘垃圾,取g=10 N/kg,則該抬升板受到的力為100 N的載荷。經查閱網上的資料,ABS PC具有重量輕、耐磨損、抗腐蝕等特點,而且制作成本相對較低,可以滿足垃圾輸送裝置的垃圾抬升板具有足夠的承載能力,以承受沙灘垃圾的重壓的使用要求。通過有限元分析模擬垃圾抬升板實際工作狀態,分析結果如圖2所示。
由圖2(a)得知,抬升板承受最大應力為1.796×107 N/m2,最小應力為3.726×103 N/m2。對比其材料彈性模量為2.41×109 N/m2,垃圾輸送裝置的垃圾抬升板所受應力在安全范圍之內;由圖2(b)得知,抬升板在承受應力時的最大位移為1.092 mm,最小位移為1.000×10-30 mm。抬升板作為垃圾輸送裝置的承重和運輸裝置,會產生微量位移,但位移的數值在設計要求范圍內,不影響裝置的運行。綜上可得,該設計滿足安全標準。
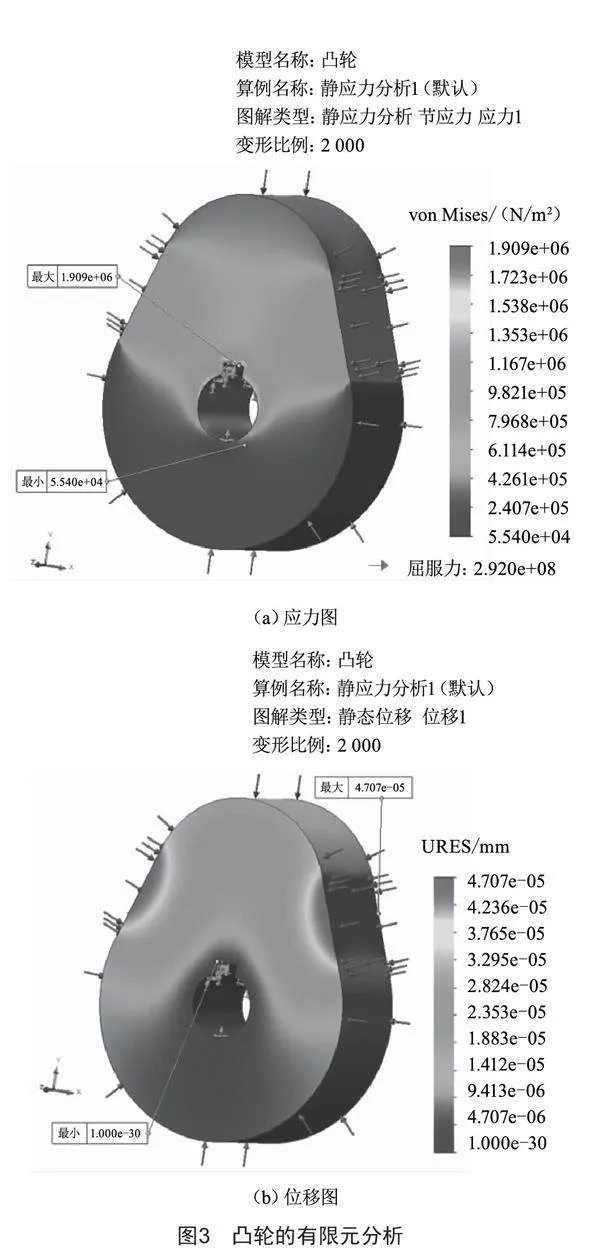
3.2" " 垃圾收集裝置凸輪的有限元分析
垃圾收集裝置中,通過凸輪的轉動帶動垃圾收集裝置上下移動,起到最后一次篩沙的作用。凸輪在該過程受到的靜應力能否符合安全標準,是確保該裝置正常運行的關鍵。
設垃圾收集裝置有40 kg的沙和沙灘垃圾,由于該裝置裝有四個凸輪,取g=10 N/kg,則一個凸輪受到的力為100 N的載荷。經查閱網上的資料,退火不銹鋼具有較好的耐腐蝕性和高強度,可以滿足凸輪在沙灘等環境中的使用要求。通過有限元分析模擬凸輪實際工作狀態,分析結果如圖3所示。
由圖3(a)得知,凸輪承受最大應力為1.909×
106 N/m2,最小應力為5.540×104 N/m2。對比裝置的材料彈性模量為2.07×1011 N/m2,因此垃圾收集裝置凸輪所受應力在安全范圍之內;由圖3(b)得知,垃圾收集裝置凸輪在承受應力時的最大位移為4.707×10-5 mm,最小位移為1.000×10-30 mm。
凸輪作為垃圾收集裝置的篩沙、承重裝置,會產生微量位移,但位移的數值在設計要求范圍內,不影響裝置的運行。
綜上可得,該設計滿足安全標準。
4" " 結束語
本文設計的沙灘垃圾清潔車采取履帶式行走裝置,其垃圾拾取裝置采用八葉式前鏟翻沙板結構,垃圾輸送裝置則使用了擋板式傳送帶,隨后通過滾筒式篩沙裝置進行篩沙,最后垃圾收集裝置采用篩孔式收集箱進行垃圾的最終收集并進一步篩除殘留在沙灘垃圾的細沙。
為了更好地設計沙灘垃圾清潔車,本文使用SolidWorks軟件進行設計和虛擬裝配。
由于垃圾輸送裝置和篩沙裝置涉及帶傳動系統,為了降低電機的功率要求,進而降低電機所需成本,采取了小傳動比實現加速的功能;為了使帶傳動系統更好地運行,查閱了帶傳動的相關資料,對于同步帶和同步輪的選擇為圓弧齒同步帶和圓柱齒輪,并根據《機械設計手冊》關于帶傳動的選型設計和垃圾輸送裝置、篩沙裝置對應電機的功率,對于各自的圓弧齒同步帶以及圓柱同步輪進行了相應的計算選型。
最后,本文利用SolidWorks軟件中的Simulation插件對垃圾輸送裝置的抬升板和垃圾收集裝置凸輪進行靜態應力仿真分析,校核其強度和剛度,驗證了結構設計的合理性和可靠性,符合安全標準。
[參考文獻]
[1] 孫暢.海洋垃圾污染問題的國際法規制:成就、缺失與前路[D].長春:吉林大學,2013.
[2] 趙肖,綦世斌,廖巖,等.我國海灘垃圾污染現狀及控制對策[J].環境科學研究,2016,29(10):1560-1566.
[3] 全球海灘日垃圾3 700噸塑料袋成頭號殺手[J].塑膠工業,2006(4):55.
[4] 王紅衛,王勇,劉中山.三亞集中清理整治沙灘環境[N].海南日報,2009-07-19(A02).
[5] 胡振宇.沙灘清潔車前叉輔具設計與分析[D].廈門:廈門理工學院,2016.
[6] 琚愛云.全液壓沙灘清潔車的設計研究[D].洛陽:河南科技大學,2016.
[7] 成大先.機械設計手冊[M].5版.北京:化學工業出版社,2010.
收稿日期:2024-03-21
作者簡介:周林建(2001—),男,福建漳州人,研究方向:機械設計。
項目資助:寧德師范學院協同創新中心項目(2023ZX01)、寧德師范學院機械工程學科建設經費資助