旋轉式電子多臂開口提選綜凸輪協同反求與數值實現
2024-12-31 00:00:00邱海飛
現代紡織技術 2024年8期







摘 要:針對高速電子多臂開口復雜的機械控制構成,通過旋轉式多臂機的功能原理解析和數值運算,實現提綜變速系統與選綜控制單元驅動凸輪的協同設計。將擺線修正等速運動規律應用于滑塊架回轉輸出,利用Matlab對提綜共軛凸輪工作輪廓進行設計計算,結果顯示:當滑塊架預設停頓角度為25°時,主、副凸輪最大壓力角約為40.8°,提綜擺臂行程角約為41.2°,滿足旋轉變速模式下的提綜工藝要求。采用“二分法”對提綜與選綜配合參數進行迭代計算,確定大轉盤安全轉角約為38.79°、選綜凸輪升程角與回程角約為83°。根據選綜機構條件及控制要求,構建基于五次多項式的擺桿運動規律,并在Matlab環境下計算生成選綜共軛凸輪理論輪廓曲線。從數值分析層面驗證了提選綜凸輪的運動配合機制,為高精度電子多臂開口的協同設計與開發提供了一定理論參考。
關鍵詞:多臂開口;二分法;共軛凸輪;綜框;協同;安全角;Matlab
中圖分類號:TS103.1;TH122
文獻標志碼:A
文章編號:1009-265X(2024)08-0091-09
收稿日期:20231106
網絡出版日期:20240226
基金項目:陜西省教育廳專項科研計劃資助項目(15JK2177);西京學院高層次人才專項基金資助項目(XJ20B09);西京學院橫向課題資助項目(2018610002001389)
作者簡介:邱海飛(1983—),男,陜西西安人,副教授,碩士,主要從事機械系統動態設計、機電產品數字化設計與開發方面的研究。
旋轉式多臂機(又稱電子龍頭)是一種先進的高速電子開口裝置。相對于傳統復動式多臂機,這種基于電子控制的
多臂開口具有結構緊湊、效率高及穩定性好等諸多優點,不僅可同時配置16~20組提綜臂,而且能夠通過獨立控制多組綜框來滿足復雜織物樣式(如小提花)的織造要求[1]。作為重要的紡織機械配套裝備,旋轉式電子多臂開口目前已廣泛應用于各類現代高速織造。
根據旋轉式多臂開口機體功能與系統構成,通常可將其劃分為4大組成部分,即電控設備模塊、提綜模塊、電磁鐵控制模塊及選綜模塊[2]。通過綜合控制與協調這些功能模塊之間的配合關系,即可按照織造要求實現不同工況下的多臂開口工藝。近年來,為適應現代織機的高速高精化發展趨勢,對多臂機提綜與選綜環節的設計控制要求愈加嚴苛。為精確控制多組綜框的升降運動,當前旋轉式電子多臂開口在提綜和選綜單元均采用凸輪驅動,如何設計具有良好動力特性的高精度提綜凸輪與選綜凸輪,一直是高速旋轉式多臂機的開發難點[3]。以往針對提綜與選綜系統的探究主要集中在凸輪機構動力學分析、運動規律仿真及性能優化等方面,如浙江理工大學的高大牛等[4]、天津工業大學的金國光等[5],已在旋轉式電子多臂開口提選綜凸輪的設計研究方面做了大量工作,而且獲得了不少具有重要價值的研究成果和經驗方法。
在旋轉式多臂開口運行過程中,提綜與選綜系統對于綜框的運動控制是相輔相成的,所以必須從工藝層面同時考慮提選綜凸輪的配合關系。然而,以往研究多將提綜與選綜單元獨立分開進行設計建模或仿真分析,而在“提綜與選綜”凸輪的聯合設計與協同開發方面的探索則相對較少,不利于提升電子多臂開口的研發效率和整機可靠性。本文結合電子多臂開口的系統構成和運行原理,深入分析旋轉式電子多臂機的提選綜模塊及其配合機制,并利用Matlab對提綜凸輪與選綜凸輪進行聯合反求,成功構建基于數值運算的高精度共軛凸輪輪廓曲線,可為復雜機織物及其織造設備的設計開發提供有力支持。
1 旋轉變速系統
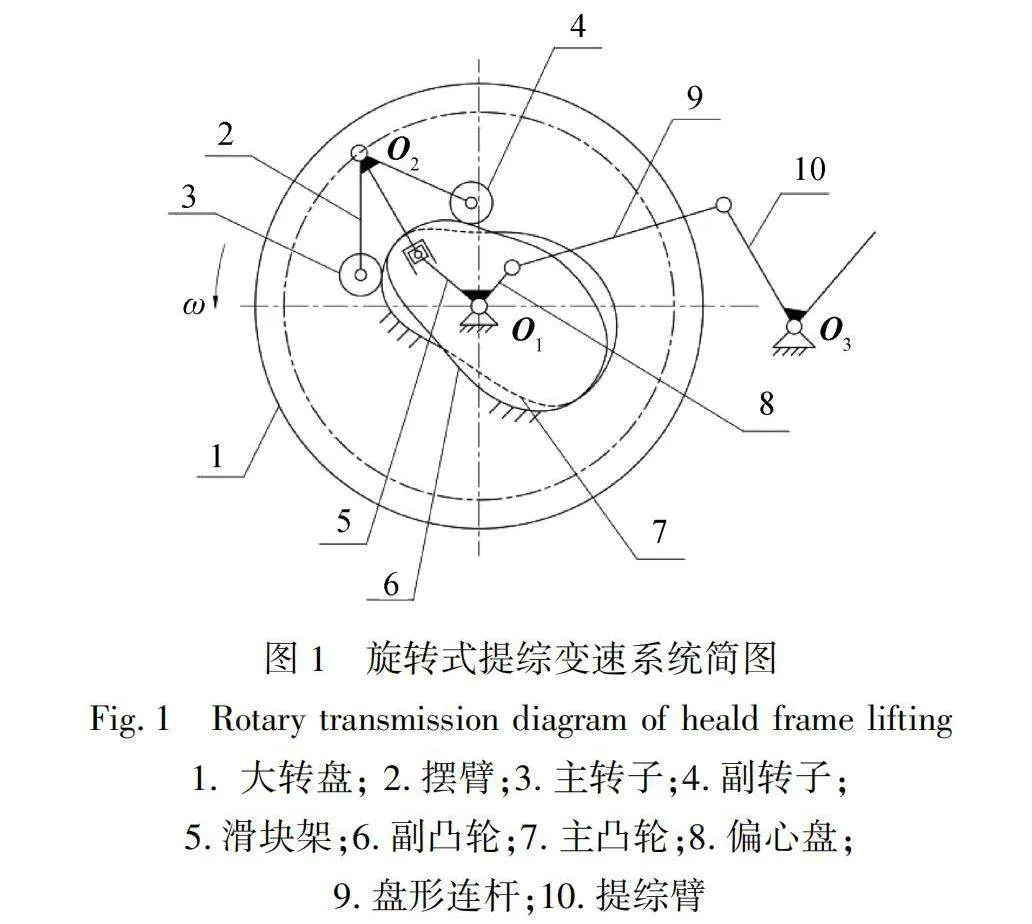
變速系統是電子多臂機實現動力轉化的執行基礎。在旋轉變速模式下,電子多臂開口可根據花紋組織精準控制多頁綜框的升降次序。旋轉式提綜變速系統簡圖如圖1所示,其結構主要由共軛凸輪機構(2、3、4、6、7)、偏心盤控制單元(5、8、9)和提綜臂(10)3部分組成[6]。為有序控制多組綜框的提紗運動,旋轉多臂開口采用大轉盤1作為動力輸入,當其以角速度ω繞O1點進行逆時針勻速回轉時,與之鉸接的擺臂2亦發生同步回轉。
由于共軛凸輪與機架固接保持靜止,所以擺臂2在回轉過程中還通過轉子3、4與主凸輪7、副凸輪6發生形鎖合,并以O2點為中心作往復擺動。與此同時,滑塊架5和偏心盤8在擺臂2驅動下產生變速回轉運動,并通過盤形連桿9將動力傳遞至提綜臂10,使其繞O3點作往復擺動,進而以變速輸出實現綜框的往復開口運動。為平衡機構轉動慣量,減輕旋轉變速過程中的振動沖擊,實際應用時往往采用對稱共軛凸輪布局[7],即在旋轉變速系統內部按照180°相位差對稱配裝一套相同的凸輪擺臂。
2 提綜共軛凸輪反求
2.1 滑塊架運動規律
為避免多臂開口系統
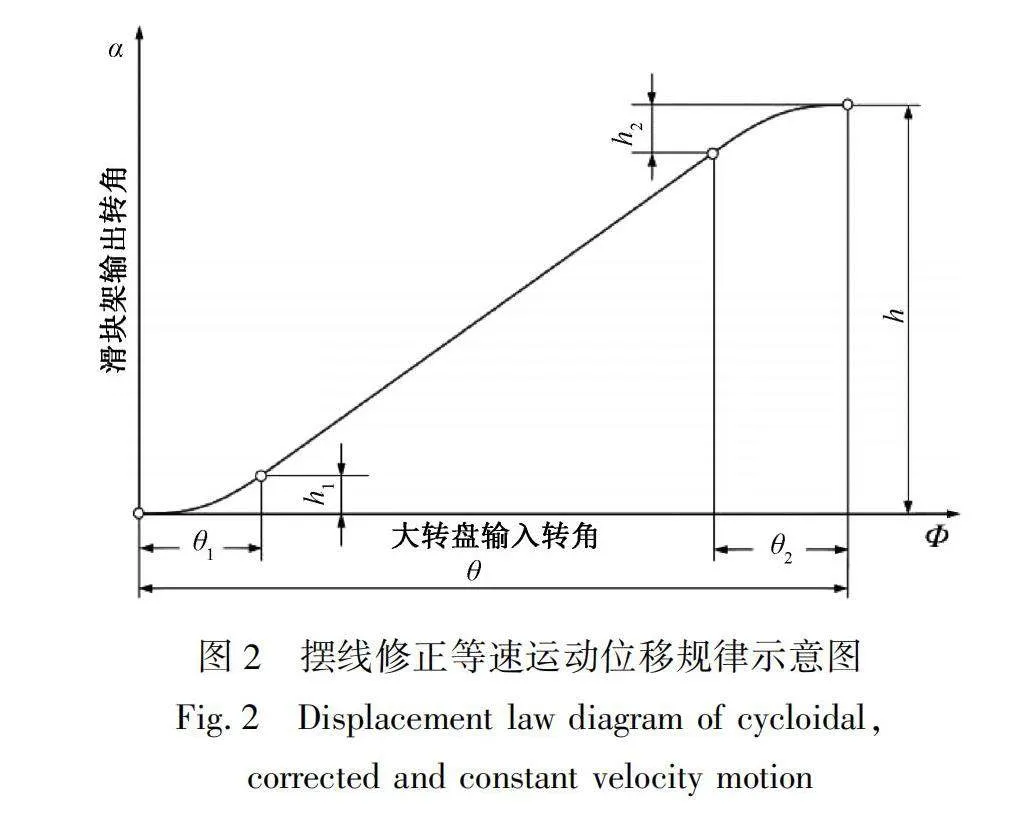
產生過大慣性沖擊,應使綜框運動在無突變前提下盡量具備較小的速度和加速度[8]。考慮到滑塊架輸出速度的穩定性,本文采用擺線修正等速運動規律驅動提綜臂,擺線修正等速運動位移規律示意圖如圖2所示。這種規律可使旋轉變速系統輸出部分勻速運動,有利于減輕提綜過程的振動和噪聲。
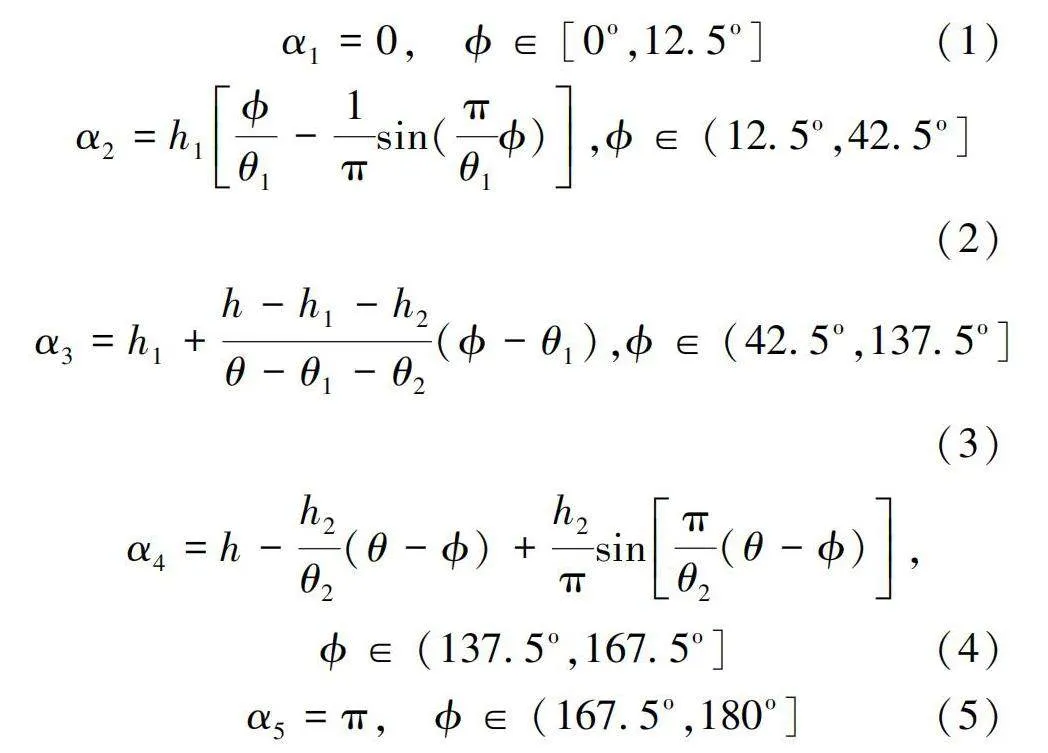
在旋轉變速系統中,0°~12.5°為靜止區段1,12.5°~42.5°為加速區段,42.5°~137.5°為等速區段,137.5°~167.5°為減速區段,167.5°~180°為靜止區段2。綜上可知,在大轉盤轉過180°過程中,滑塊架運動共包含兩次停頓,且每次停頓角度為12.5°。根據圖2中擺線修正等速運動位移規律,在0°~180°區間內構建滑塊架角運動方程[9],如式(1)—(5)所示:
式中:θ為大轉盤在擺線修正等速運動規律中的總轉角,155°;θ1為大轉盤在加速區段轉角,30°;θ2為大轉盤在減速區段轉角,30°;Φ為大轉盤從初始位置勻速轉過角度(即輸入運動旋轉角),[0°,180°];αi為滑塊架在不同運動區段的輸出轉角(i=1,2,3,4,5);h為滑塊架在擺線修正等速運動規律中的總轉角(即滑塊架轉動行程角),180°;h1、h2為滑塊架在加速區段和減速區段的轉角,且h1=h2=21.6°,其計算方法如式(6)、式(7)所示:
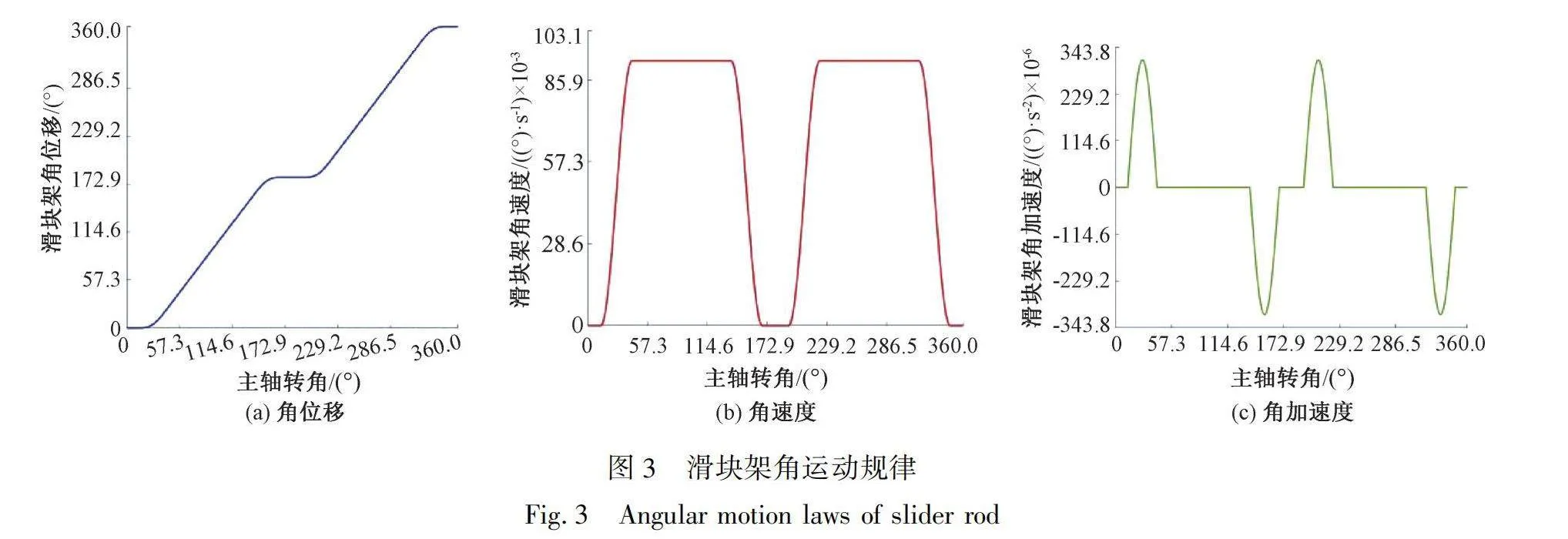
根據式(1)—(7),利用Matlab編寫運算設計程序,構建如圖3所示滑塊架角運動曲線。對比圖2(a)—(c)可知,滑塊架角運動曲線起伏平緩、過渡光滑,且角速度、角加速度變化無突變,說明滑塊架回轉輸出運動平穩。同時,在主軸回轉一周過程中,滑塊架分別在347.5°~12.5°和167.5°~192.5°區段處于靜止狀態,而且每次滑塊架停頓角度相對較大(約25°),有利于穩定梭口和執行引緯運動。
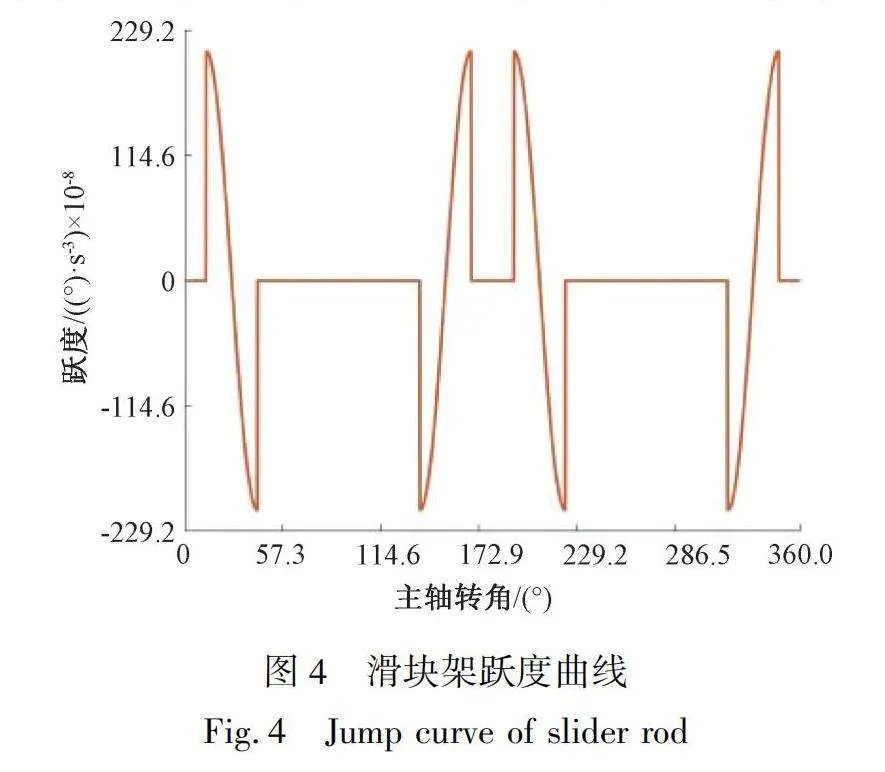
在一個旋轉變速周期內(0~360°),滑塊架按照“靜止—加速—等速—減速—靜止”規律形成兩次開口,其躍度曲線如圖4所示。從圖4可以看到,滑塊架躍度曲線存在多個有限極值,且曲線整體變化連續無突變,可見提綜變速系統具有良好的綜合運動性能,符合擺線修正等速運動規律設計預期。
2.2 擺臂運動規律
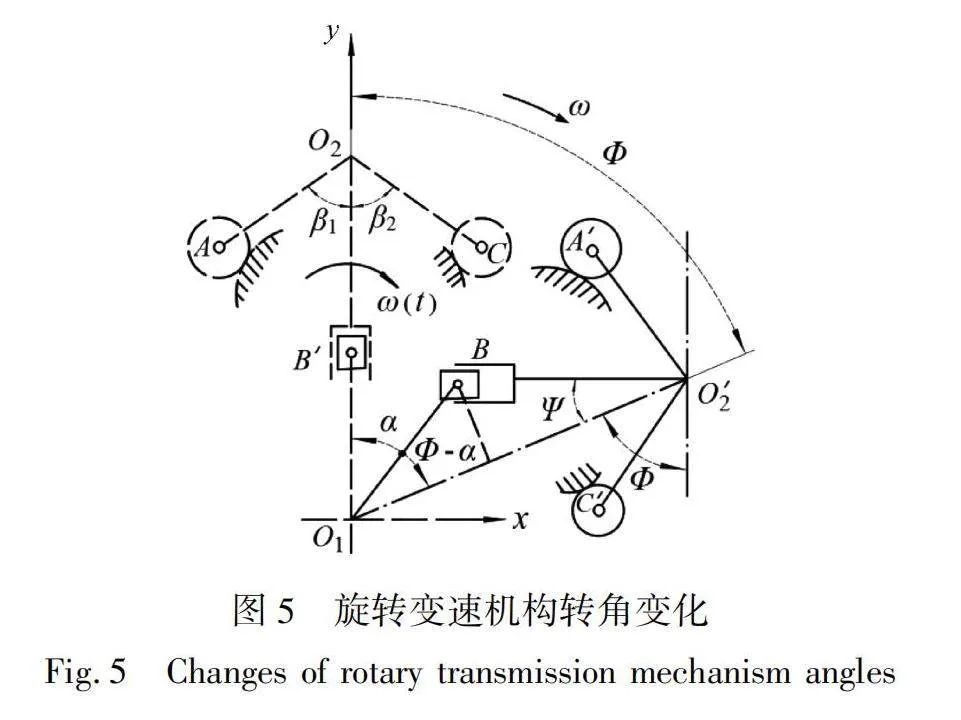
提綜變速系統主要由共軛凸輪與搖桿滑塊機構組合而成,如圖5所示,當大轉盤以恒定角速度ω輸入一個旋轉角Φ時,滑塊架在擺臂驅動下將以變角速度ω(t)對應輸出一個旋轉角α,兩者關系如式(8)、式(9)所示:
?=ωt(8)
α=f(?)(9)
比較式(8)、式(9)可知,滑塊架轉角α是以大轉盤轉角Φ為中間變量、時間t為自變量的復合函數。
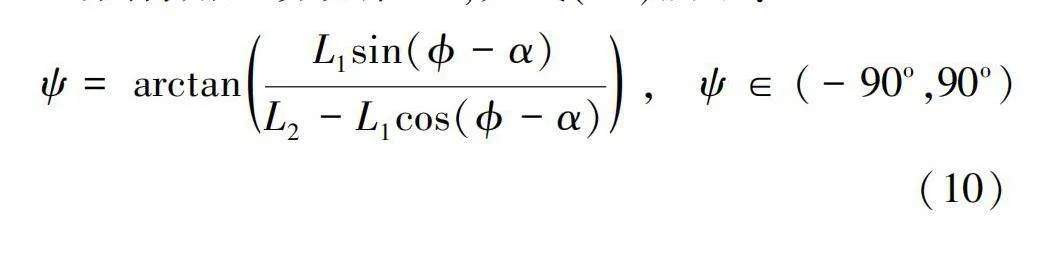
根據圖5中的機構原理與幾何關系,可以推導出擺臂角運動規律[10],如式(10)所示:
式中:L1為滑塊架O1B的長度,58 mm;L2為大轉盤中心至擺臂鉸接點距離O1O2,116 mm。由式(10)可知,擺臂角位移Ψ是以α、Φ為自變量的反正切函數。
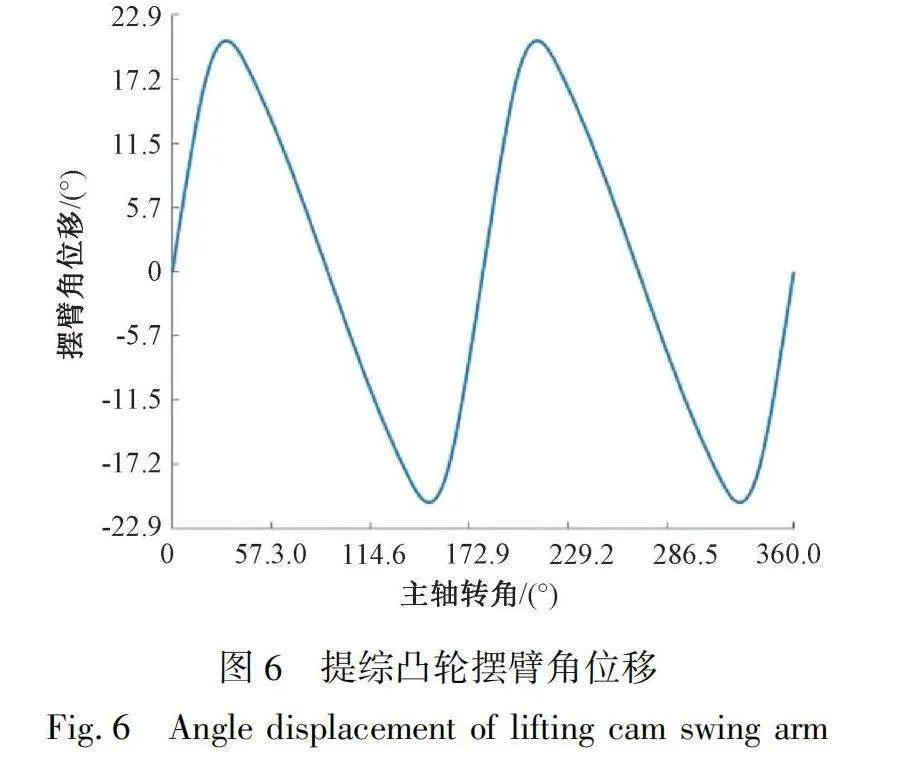
將滑塊架角運動方程依次代入式(10),在Matlab環境下編程構建擺臂角運動規律,如圖6所示,在[0,360°]區間內,當大轉盤以角速度ω完成一個勻速回轉周期時,擺臂將以正弦簡諧規律沿共軛凸輪廓形發生往復擺動,且其最大擺角約41.2°。
2.3 主、副凸輪輪廓
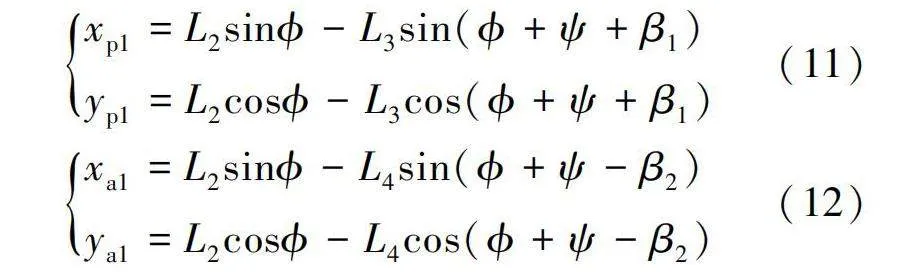
根據擺臂角運動規律和旋轉變速系統結構動力參數,可求出主、副凸輪理論廓線方程,如式(11)、式(12)所示[11]:
式中:(xp1, yp1)為主凸輪理論廓線點坐標;(xa1, ya1)為副凸輪理論廓線點坐標;L3、L4為主、副擺臂長度,56.5 mm;β1、β2為主、副擺臂安裝角,53°。
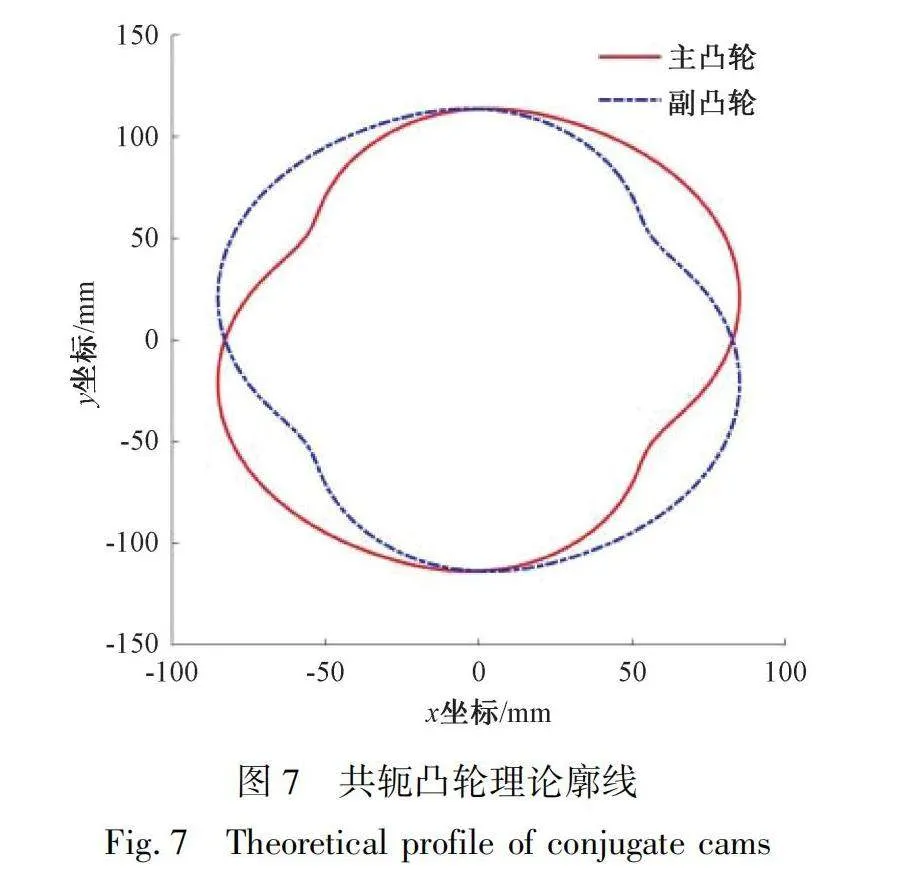
考慮到旋轉變速系統的對稱性,在求出0°~180°區間內的運動規律α=f(Φ)后,對其加上180°相位差即可獲得180°~360°區間內的運動規律,對此不予贅述。根據式(11)、(12),利用Matlab編程構建共軛凸輪理論輪廓曲線,如圖7所示。對比分析可知,主、副凸輪具有相似的理論輪廓,其輪廓向徑介于74.7~113.8 mm之間,因此,主、副凸輪理論廓線的基圓半徑均為74.7 mm。
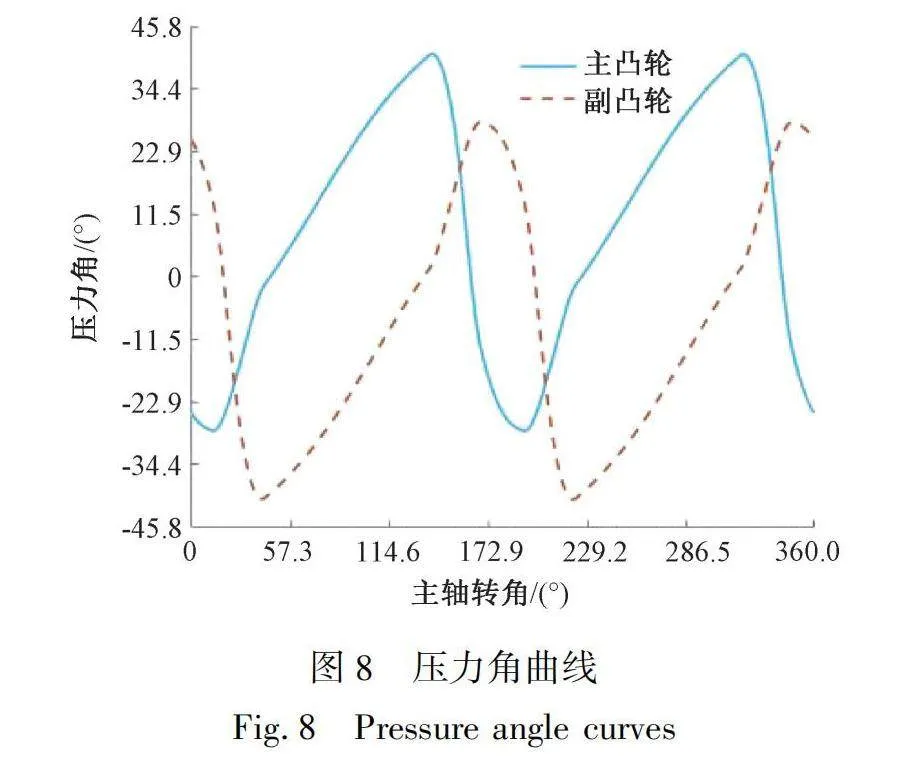
為保證提綜變速系統順利實現動力傳遞,應使共軛凸輪壓力角符合傳動設計要求,如圖8所示,主、副凸輪最大壓力角約40.8°,滿足推程階段的擺動滾子從動件凸輪機構許用壓力角[α]=40°~50°,所以提綜共軛凸輪具有良好的動力傳遞特性。
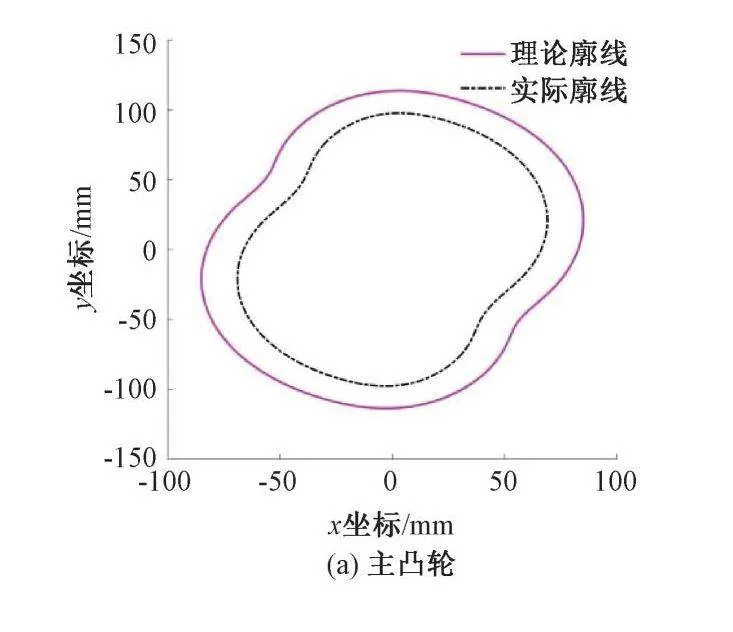
以滾子半徑r0=16 mm為參考,分別對主、副凸輪理論廓線進行等距偏移,即可得到共軛凸輪實際工作輪廓,如圖9(a)、(b)所示,為內偏移狀態下的主、副凸輪實際輪廓曲線,其最小曲率半徑約32 mm。由機構學理論可知,凸輪曲率半徑越小,其輪廓曲線變化越大,能夠實現的運動軌跡控制精度也就越高[12]。
3 選綜-提綜配合計算
3.1 選綜實現原理
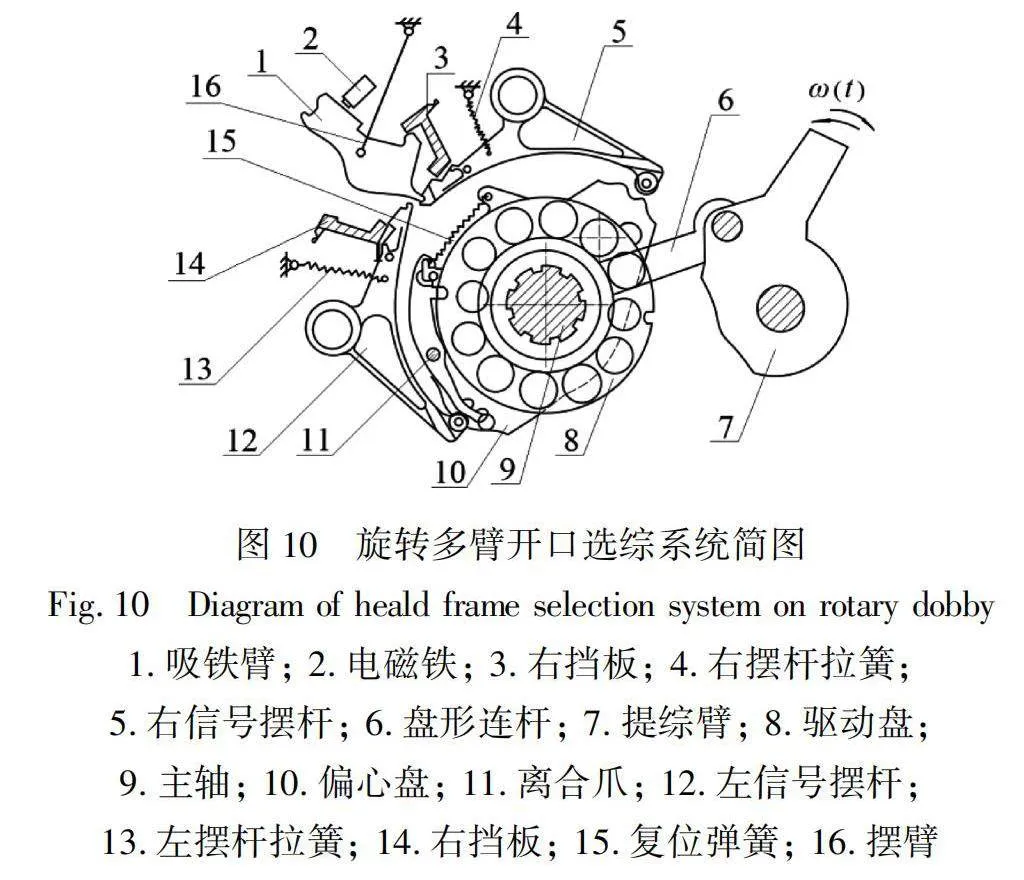
在旋轉多臂開口織造過程中,為使多組綜框能在提升狀態下保持一定時間停留,需要通過選綜系統驅動偏心盤控制單元來有選擇性地執行提綜運動[13]。相對于提綜變速機構,選綜系統具有更為復雜的機械控制構成,如圖10所示。該系統主要包括選綜凸輪機構和選綜控制單元兩部分,其中選綜凸輪通過主軸9與大轉盤固定連接,并可在大轉盤同步驅動下使擺臂按照一定規律實現選綜控制。
選綜控制單元主要通過控制離合爪11的位置狀態來實現對提綜臂7的運動控制,即:當離合爪11卡入驅動盤8上的凹槽時,偏心盤10與驅動盤8將隨主軸9進行同步旋轉運動,進而使提綜臂7發生擺動;當離合爪11未與驅動盤8發生卡合時,偏心盤10與驅動盤8處于分離狀態,在此條件下,由于主軸1轉動不會影響偏心盤10的靜止狀態,所以提綜臂7亦不發生擺動。
3.2 大轉盤安全轉角
根據多臂開口選綜與提綜運動配合機理,旋轉變速系統和選綜凸輪均由大轉盤提供動力輸入。為避免選綜機構與提綜機構發生機械碰撞或運動干涉,要求受控信號擺桿(5和12)與偏心盤10在選綜控制過程中的某一時段處于脫離狀態,因此,必須對偏心盤10設定一個“安全轉角”[14]。已知變量a=12.5°、b=42.5°、θ1=30°,則在式(2)基礎上,可將滑塊架加速區段的運動規律改寫為如式(13)所示形式:
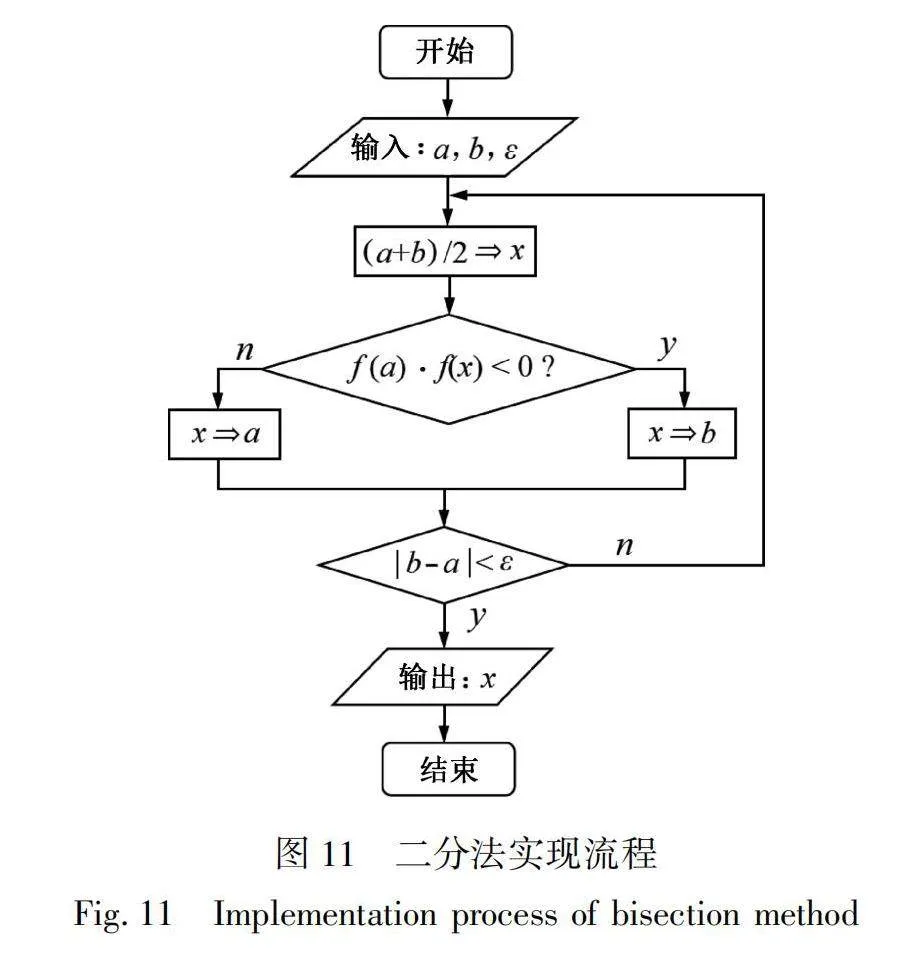
令偏心盤安全角αs=12°,采用“二分法”求解大轉盤安全轉角Φs。“二分法”(又稱二分區間法)是一種基于區間不斷縮小的迭代方法,常被用于解決非線性方程求解、函數尋極值等數學問題[15],其實現流程如圖11所示:假設函數f(x)在區間[a,b]內有根,在給定精度ε條件下對求根區間進行二等分,并通過判斷f(a)f(x)的符號來確定零點所在區間,進而將有根區間逐步縮小,直至求得符合精度要求的近似根。
將“二分法”求解精度設定在小數點后三位(即ε=0.001),利用Matlab編程對大轉盤安全轉角Φs進行迭代計算,求得近似解:Φs≈38.79°。由此可知,當大轉盤轉過約38.79°、偏心盤轉過12°時,旋轉多臂開口能夠順利實現選綜與提綜的配合控制。
4 選綜共軛凸輪反求
4.1 升程角與回程角
由選綜與提綜配合控制計算結果可知,當大轉盤驅動選綜共軛凸輪從近休角轉過約38.79°時,受控信號擺桿與偏心盤必須符合“安全角”設定要求,假設此時所對應的選綜凸輪擺桿從動件轉角ζs=3°,則選綜凸輪升程角δ1的計算方法如式(14)所示[16]:
式中:h0為擺桿最大升程角,8°;δ1∈[3°,90°]。
在[3°,90°]區間內,設定求解精度ε=0.001,利用“二分法”對式(14)進行迭代運算,求出選綜凸輪升程角δ1=82.7351°。據此可知,當δ1≥82.7351°時,選綜凸輪機構能夠正常完成選綜控制過程。令升程角等于回程角(即δ1=δ2=83°)。已知選綜共軛凸輪在0°~180°區間內存在兩處近休停頓,即:0°~3°和177°~180°,則在0°~360°區間內,其單次近休角度為6°、單次遠休角度為8°。
4.2 擺桿運動規律
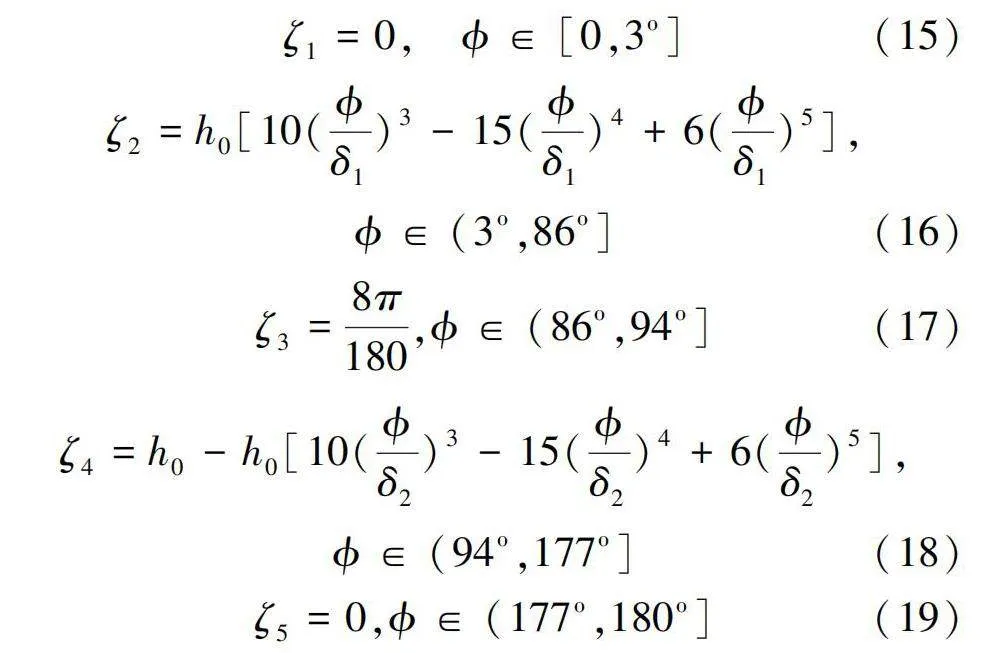
考慮到選綜控制過程的平穩性,將運動沖擊較小的五次多項式規律應用于選綜共軛凸輪設計。由于選綜運動亦具有對稱性特征,所以只需構建0°~180°區間內的從動件運動規律,如式(15)—(19)所示[9]:
式中:Φ為大轉盤轉角;ζi為擺桿角位移(i=1,2,3,4,5);h0為擺桿行程角,8°;δ1為升程角,83°;δ2為回程角,83°。對式(15)—(19)加上180°相位差后,即可獲得完整的選綜凸輪擺桿運動規律。
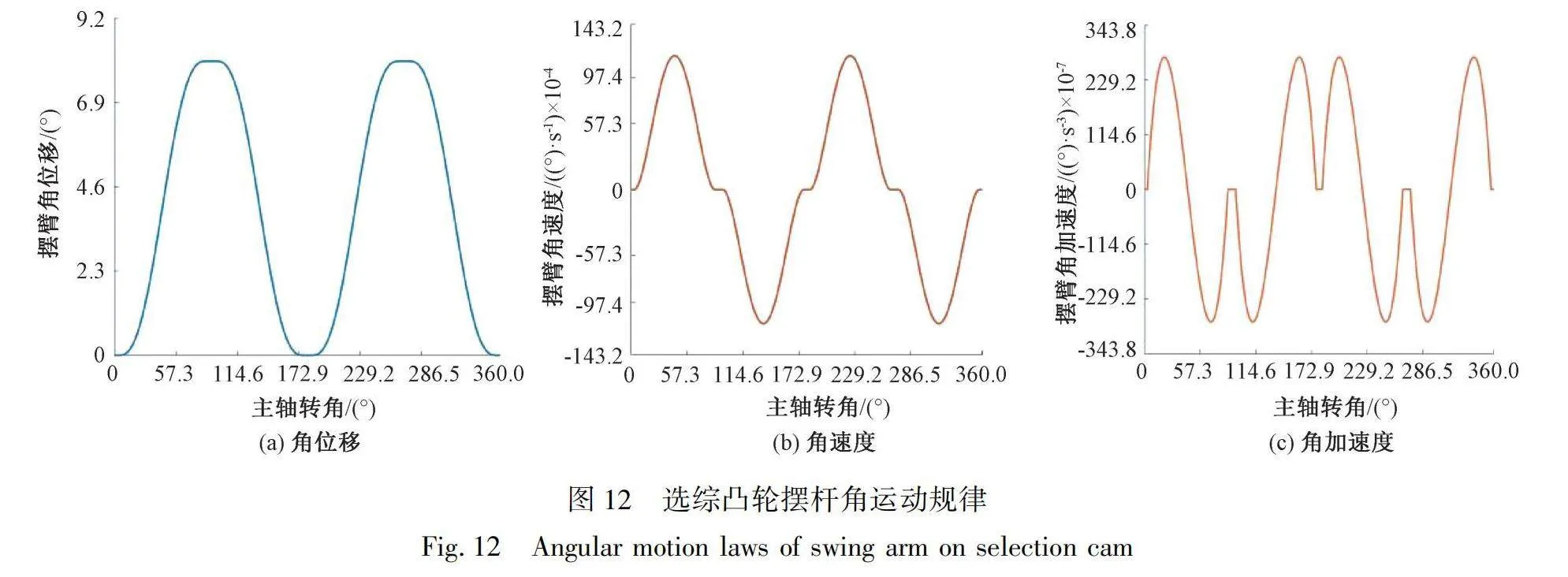
在Matlab環境下編程構建選綜擺桿角運動規律,如圖12所示。分析可知,隨著凸輪軸在0~360°區間內轉動一周,擺桿從動件按照“近休—升程—遠休—回程”規律完成兩次往復擺動,如圖12(a)所示,其最大擺角約8°,符合擺桿運動規律預設條件。此外,擺桿角速度、角加速度峰值較小,且曲線光滑無突變,如圖12(b)、(c)所示,說明選綜控制過程振動沖擊較小,有利于旋轉式多臂開口平穩運行。
4.3 凸輪輪廓曲線
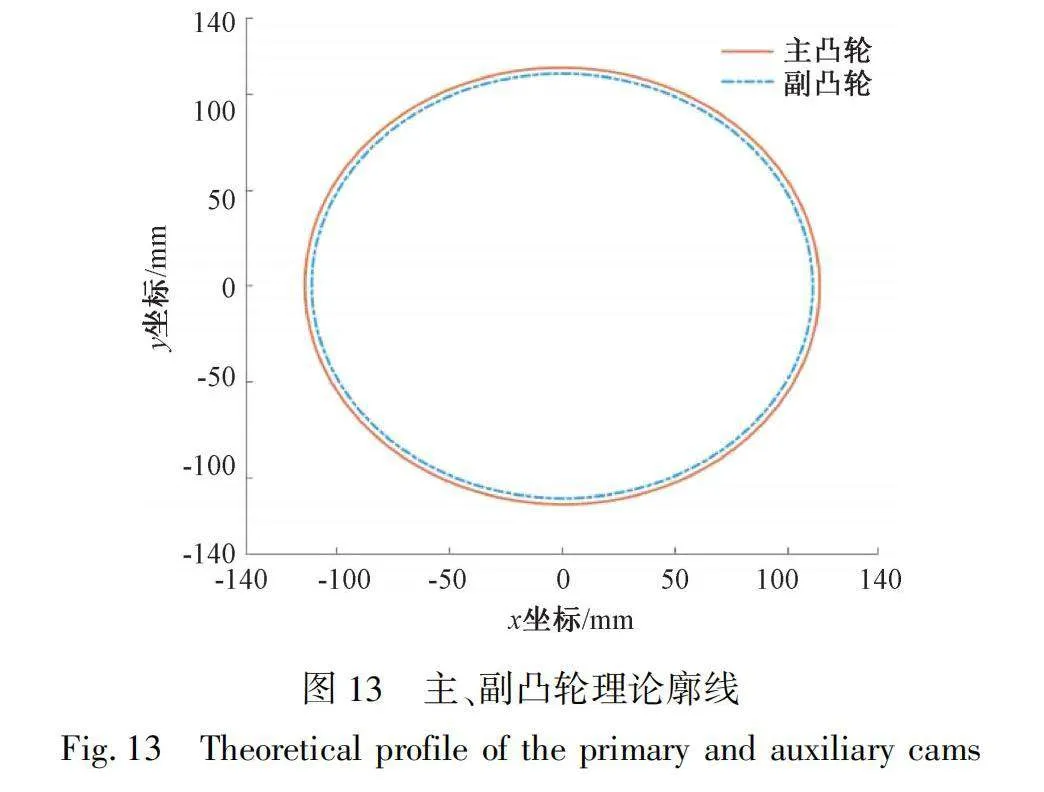
選綜共軛凸輪由兩組同軸擺動滾子從動件凸輪機構組合而成,其理論廓線方程如式(20)、式(21)所示[17]:
式中:(xp2,yp2)為主凸輪理論廓線點坐標;(xa2,ya2)為副凸輪理論廓線點坐標;Φ為大轉盤轉角;ζ為擺桿角位移;L5為凸輪中心距,203 mm;L6為主擺桿長度,116 mm;L7為副擺桿長度,113 mm;η1為主擺桿安裝角,46°;η2為副擺桿安裝角,52°。
將擺臂運動規律及相關設計參數分別代入理論廓線方程,通過Matlab編程計算主凸輪輪廓點坐標(xp2,yp2)和副凸輪輪廓點坐標(xa2,ya2),設計生成如圖13所示選綜共軛凸輪理論輪廓曲線。對比分析可知,主、副凸輪理論輪廓與橢圓類似,其基圓半徑分別為113.9 mm和110.8 mm。將主、副凸輪理論輪廓線以滾子半徑大小進行等距偏移后,即可獲得選綜共軛凸輪實際工作輪廓。
5 結語
通過原理分析、機構設計、理論推演、數值運算及程序編譯等,實現了提綜變速凸輪與選綜控制凸輪的協同開發,明確了Matlab環境下的共軛凸輪反求設計思路與數值實現方法。結果表明:將擺線修正等速規律和五次多項式規律應用于旋轉式電子多臂開口,同時構建基于“二分法”的提選綜凸輪協同配合運算方案,能夠有效提升凸輪輪廓曲線的數值精度及可靠性,符合提綜變速系統與選綜控制單元的設計預期。本文研究僅限于數值運算范疇,后續工作可建模仿真
、CAE和樣機實驗等方面開展縱深探索,以期驗證文中研究思路和設計方法的實踐可行性。
參考文獻:
[1]周國慶,龔文強,袁汝旺,等.旋轉式電子多臂提綜機構運動特性分析[J].天津工業大學學報,2019, 38(6): 58-62.
ZHOU Guoqing, GONG Wenqiang, YUAN Ruwang, et al. Kinematic characteristic analysis of rotary electronic dobby heald lifting mechanism[J]. Journal of Tiangong University, 2019, 38(6): 58-62.
[2]李志祥,沈毅,方圓,等.旋轉多臂機原理及其電子控制[J].絲綢技術,1997(3):12-17.
LI Zhixiang, SHEN Yi, FANG Yuan, et al. Principle and electronic control of rotating dobby[J].Silk Technology, 1997(3):12-17.
[3]肖志濤,尹洪環,于鴻彬,等.多臂機旋轉變速機構凸輪廓線建模與重構[J].紡織學報,2020, 41(5): 159-166.
XIAO Zhitao, YIN Honghuan, YU Hongbin, et al. Modeling and reconstruction of cam profile for dobby modulator[J]. Journal of Textile Research, 2020, 41(5): 159-166.
[4]高大牛,沈毅,劉春雷.GT421型多臂機選綜共軛凸輪設計[J].現代紡織技術,2012, 20(1):27-31.
GAO Daniu, SHEN Yi, LIU Chunlei. The design of election comprehensive conjugate cam of GT421 dobby[J]. Advanced Textile Technology,2012, 20(1): 27-31.
[5]金國光,魏曉勇,魏展,等.旋轉式多臂機提綜機構動力學分析與優化[J].紡織學報,2018, 39(9): 160-168.
JIN Guoguang, WEI Xiaoyong, WEI Zhan, et al. Dynamic analysis and optimization of rotary dobby lifting comprehensive mechanism[J]. Journal of Textile Research, 2018, 39(9): 160-168.
[6]張遠華,茍向鋒,陳曉芳,等.電子多臂機旋轉變速機構共軛凸輪再設計[J].機械傳動,2018, 42(4): 57-61.
ZHANG Yuanhuan, GOU Xiangfeng, CHEN Xiaofang, et al. Redesign of conjugate cam of rotation variable speed mechanism of electronic dobby[J]. Journal of Mechanical Transmission, 2018, 42(4): 57-61.
[7]高大牛.基于旋轉原理的電子多臂機研究[D].杭州:浙江理工大學, 2012:12-14.
GAO Daniu. Research on Electronic Dobby Based on the Principle of Rotary[D]. Hangzhou: Zhejiang Sci-Tech University, 2012:12-14.
[8]袁汝旺,祝雷雷,呂雪奎,等.旋轉多臂變速運動規律建模及其對開口機構傳動影響[J].紡織學報, 2019, 40(12): 127-133.
YUAN Ruwang, ZHU Leilei, Lü Xuekui, et al.Modeling of rotary shifting motion characteristics of electronic dobby and influence thereof on shedding mechanisms driving[J]. Journal of Textile Research, 2019, 40(12): 127-133.
[9]劉春雷.高速旋轉式多臂機機構分析及設計[D].杭州:浙江理工大學,2012:21-47.
LIU Chunlei. Structural Analysis and Design of High-speed Rotary Dobby[D]. Hangzhou: Zhejiang Sci-tech University, 2012:21-47.
[10]季海彬,周香琴,成小軍.基于開口工藝要求的多臂機機構參數分析[J].浙江理工大學學報(自然科學版), 2016,35(2):205-210.
JI Haibin, ZHOU Xiangqin, CHENG Xiaojun. Analysis on mechanism parameters of dobby based on requirement of opening process[J]. Journal of Zhejiang Sci-Tech University (Natural Sciences), 2016, 35(2): 205-210.
[11]沈毅,劉春雷,高大牛,等.共軛凸輪—滑塊搖桿組合機構的設計與應用[J].機械設計與研究,2012, 28(4): 22-25.
SHEN Yi, LIU Chunlei, GAO Daniu, et al. Design and application of a combined mechanism with conjugate cam and slider rocker[J]. Machine Design amp; Research, 2012, 28(4): 22-25.
[12]邱海飛,李春風,陳銘,等.一種外置式高速織機共軛凸輪開口設計[J].機械設計, 2022,39(11):1-6.
QIU Haifei, LI Chunfeng, CHEN Ming, et al. Design of high-speed loom' s external conjugate cam shedding mechanism[J].Journal of Machine Design, 2012, 28(4): 22-25.
[13]王奇霞. 旋轉電子多臂機選綜系統分析與設計[D].杭州:浙江理工大學,2013:9-12.
WANG Qixia. Analysis and Design of Heald System of Rotary Electronic Dobby[D].Hangzhou: Zhejiang Sci-Tech University, 2013:9-12.
[14]袁嫣紅.旋轉式電子多臂機與織機配合的原理[J].絲綢,2000, 37(8):24-25.
YUAN Yanhong. Matching mechanism for rotary electronic dobby and loom[J]. Journal of Silk, 2000, 37(8):24-25.
[15]陳長興,林興,任曉岳,等.基于二分法迭代的頻譜感知節能優化策略[J].空軍工程大學學報(自然科學版), 2017,18(5):61-66.
CHEN Changxing, LIN Xing, REN Xiaoyue, et al. An optimization strategy of energy efficient in spectrum sensing based on bisection and iteration[J].Journal of Air Force Engineering University (Natrnal Science Edition), 2017,18(5): 61-66.
[16]王奇霞,袁嫣紅.HQ3620旋轉式電子多臂機選綜共軛凸輪機構分析與設計[J].現代紡織技術,2013, 21(6): 9-12.
WANG Qixia,YUAN Yanhong. Analysis and design of heald selecting conjugate cam mechanism of HQ3620 rotary electronic dobby[J]. Advanced Textile Technology,2013, 21(6): 9-12.
[17]邱海飛.高速打緯共軛凸輪理論廓線反求實現[J].機械強度,2021,43(4):1002-1006.
QIU Haifei. Reverse realization of pitch curve on conjugate cam with high speed beating-up[J]. Journal of Mechanical Strength, 2021, 43(4): 1002-1006.
Collaborative reverse design and numerical implementation of heald frame lifting and selection cams on a rotary electronic dobby
QIU Haifei
(School of Mechanical Engineering, Xijing University, Xi'an 710123, China)
Abstract: "The rotary electronic dobby has many advantages, such as compact structure, high efficiency, and good stability. In order to control the lifting motion of multi-page heald frames precisely, the current mechanical system of electronic dobby chooses a cam drive in both lifting and selection units. Designing high-precision lifting and selection cams with good dynamic characteristics has always been problematic in developing high-speed electronic dobby. In addition, the motion control of the lifting and selection systems for the heald frame is complementary, so it is necessary to consider the cooperating factors of the lifting and selection process from the process level. This paper combines the composition and operating principle of the rotary electronic dobby and realizes the joint reverse design of the lifting and selecting cams in Matlab software, which is conducive to a deep understanding of the rotary electronic dobby's lifting and selection coordination mechanism.
By analyzing the process, designing the mechanism, deducing equations, and conducting theoretical calculations, the cycloidal, corrected and constant velocity motion law was applied to the rotation output of the slider rod. A reverse design program for the profile curve of the lifting conjugate cam was developed by Matlab software. The \"bisection method\" was used to iteratively calculate the coordination parameters of the lifting and selection cams, thereby determining the safety angle of the large disk, the lifting angle, and the return angle of the selection cam. On this basis, combined with the requirements of selection and control, a swinging rod motion law based on a quintic polynomial was constructed, and the theoretical profile curve of the selection conjugate cam was designed and generated through Matlab software. The joint development of the lifting and selection conjugate cams was achieved, and the feasibility of the cooperation between the lifting and selection system was verified. The lifting and selecting cam mechanism has good motion performance and coordination relationship when the motion laws of cycloidal, corrected and constant velocity and the quintic polynomial are employed.
The reverse design ideas and numerical implementation method of lifting and selecting conjugate cams have been clarified, providing an essential reference for designing and developing high-precision rotary electronic dobby.
Keywords: electronic dobby; bisection method; conjugate cam; heald frame; collaboration; safe angle; Matlab