基于自動化控制理論的多伺服系統功率分散及其控制策略的研究
2024-12-31 00:00:00唐濤
今日自動化 2024年8期
自動化控制理論作為一門交叉學科,其起源可追溯至19世紀末20世紀初。早期的控制理論主要集中在機械控制領域,例如,風門調節、水位控制等。20世紀40年代后,隨著信息理論、數學和工程控制方法的發展,自動化控制理論開始逐漸形成并得到應用。其基礎概念主要包括負反饋、穩定性、系統性能和控制方案設計等方面。
在伺服自動控制領域,反饋概念是至關重要,其使得控制系統具有更好的穩定性和魯棒性。電氣自動化技術在自動化控制過程中的優勢有助于提高生產控制質量、控制精度和效能等。自動化控制理論的應用具有鮮明的特點,如具有實現對多伺服系統的綜合監控,保證監控工作實時性,保證多伺服系統的安全穩定運行等。通過自動化技術的科學應用,可以有效地提高工業生產效率,最大限度地實現多伺服系統自動化運行的目的,進而達到無人化工作的目的。
電氣自動化技術的應用,避免了惡劣環境對工作人員的影響,大幅減輕了工作人員的工作量,有助于提高工業生產的整體效率。此外,自動化技術的優勢和其在多伺服系統控制中的應用適應性強也很突出。該技術系統正朝著多樣化、標準化的方向發展,并與多伺服系統自動化控制要求相適應,可以最大限度地方便系統的后期調試。
1 基于自動化控制理論的多伺服系統的應用價值
1.1 有利于提高生產效率
自動化控制理論在多伺服系統中的科學應用,可以大幅提高生產效率,有助于節約人力資源,達到高效生產的目的。在高速發展的現代工業中,系統運行環節越來越多,伺服系統也隨著變多,在多伺服系統的發展中,對自動化控制理論應用的需求進一步提高,在此基礎上,伺服控制的串級系統和并級系統日漸成熟。大規模的總體控制調動使得生產效率提高,生產人員減少,生產質量和生產速度大幅提高。這就要求越來越重視自動化控制理論的科學應用。采用自動化控制理論對自動化控制過程進行優化,可以保證各種多伺服系統自動化控制的質量,節約人力資源。
1.2 有利于優化生產工藝
自動化控制理論在多伺服系統控制過程中的科學應用是自動化學科發展的必然因素,其發展可促進多伺服系統控制精度和控制穩定性,保證生產活動的順利開展,最大限度地優化生產工藝。同時,利用自動化控制理論有助于及時發現系統運行問題,對故障問題及時處理并組織分析研判,以保證多伺服系統的良好運行,最大限度地提高生產水平。
1.3 有利于全面監測系統功率
自動化控制理論在多伺服系統自動控制中的科學運用,旨在實現對整個系統的全面監控。計算機軟硬件技術的迅猛發展為自動化控制理論的進步提供了強大推動力。通過科學應用自動化控制技術,能夠有效地提升自動化控制的水平,具有顯著的積極意義。在具體應用中,該技術可實現實時監控,并對多伺服系統參數進行合理調整,從而確保參數控制的精準性。此外,自動化控制理論能夠對各個系統的閥門進行有效控制,將來自各部門的數據進行整合,并實時反饋至軟件系統中,使得用戶可以隨時隨地查閱所需數據,這對于管理工作高效、順暢的展開具有積極的促進作用。
2 基于自動化控制理論的多伺服系統功率分散設計
基于自動化控制理論的多伺服系統功率分散設計是低功率工況下穩定運行的關鍵,在這種特殊模式下,功率水平相對較低,系統面臨中雙缸同步行為變化、控制精度要求提高以及安全性等方面的挑戰。多伺服系統功率分散設計需要綜合考慮以下幾個關鍵方面。
(1)動態響應能力。低功率運行模式下,系統對于中子動力學變化的響應速度要求更高。為了保持反應堆的穩定性,多伺服系統應采用先進的控制算法,如模型預測控制(MPC)等,以確保多伺服系統能夠快速而準確地調整反應堆功率。
(2)魯棒性。由于低功率狀態下的反應堆對外部擾動更為敏感,多伺服系統需要具備良好的魯棒性,即在面對不確定性和變化時,系統能夠仍然保持穩定。采用先進的控制算法和魯棒控制技術,可以提高多伺服系統對于不確定因素的適應能力。
(3)控制精度。低功率運行模式下,系統對于功率控制的精度要求更高,多伺服系統應該結合先進的傳感器技術和精確的測量設備,確保對反應堆功率的測量和控制具有足夠的精度。
(4)系統硬件可靠性。在設計多伺服系統時,需要考慮系統硬件的可靠性,系統中的傳感器、執行器和控制單元等組件都需要具備高可靠性,以防止硬件故障對系統性能的不利影響。
(5)應急控制策略。考慮到安全性的重要性,多伺服系統設計應包括應急控制策略,在低功率運行模式下可能發生的突發事件中,多伺服系統應能夠迅速采取措施,確保反應堆安全停機或轉入安全狀態。
3 基于自動化控制理論的多伺服系統控制策略
3.1 加強傳感技術的應用
傳感技術在多伺服系統自動控制中的應用已取得了顯著的進展,并為生產過程的穩定性、效率和質量帶來了顯著的提升。然而,這一領域也面臨著一系列挑戰,包括安全性、故障診斷和維護、數據安全和隱私、技術更新和維護、人員技能、成本與回報以及集成和互操作性等。為了應對這些挑戰,企業需制訂綜合的戰略計劃,包括投資員工培訓、定期維護和更新技術、加強數據安全和隱私保護、考慮長期投資回報等方面。此外,政府和行業組織通過制訂相關政策和標準,可促進傳感技術在多伺服系統自動控制中的可持續發展。總之,傳感技術為多伺服系統自動控制帶來了巨大的機遇,但也需要克服一系列挑戰。只有充分認識并應對這些挑戰,才能確保傳感技術在多伺服系統中持續發揮其重要作用。
傳感技術根據其所測量的物理量不同,可分為多種類型。常見的傳感器包括位移傳感器、壓力傳感器、溫度傳感器、光學傳感器、加速度傳感器等。每種傳感器都基于特定的物理原理工作。例如,位移傳感器通常利用電阻、電感或光學原理來測量物體的位置或位移;壓力傳感器則利用壓阻效應或壓電效應來感知介質的壓力變化;光學傳感器則利用光電效應來測量光的強度或頻率。傳感器原理多樣,但均遵循著將感知到的物理量轉化為電信號的基本原則。現代化的生產工藝需要高度自動化和智能化的生產設備,而這些設備離不開精密的傳感器,以便及時獲取環境信息。
除了在多伺服系統的控制方面發揮著重要作用,傳感技術還提供了豐富的技術支持,通過傳感器獲取的生產設備信息,可被用于數據分析、預測和優化,從而幫助多伺服系統實現資源優化配置。傳感技術的應用還促進了大數據、人工智能等領域的發展,為多伺服系統決策提供了更科學、更準確的依據。
3.2 抱閘控制架構設計
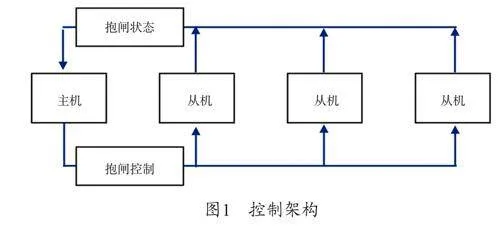
基于自動化控制理論的多伺服系統采用一主多從的方式,且系統需要在部分非嚴重性故障時剔除故障驅動器繼續運行,因此抱閘不能作為單獨控制的功能,應當以主機作為抱閘的主控單元。基于該前提的方案設計應滿足任意時刻抱閘控制電路工作正常,抱閘控制信號ARM工作正常,且抱閘邏輯應由主機控制,在發送的數據中對抱閘控制進行輸出。抱閘控制時由于需要先將是能打開,再開抱閘,該過程延時控制由主機主導完成,最終輸出由主機將開閘信號送出分發至各個從機。主從通信交互的速率較高,抱閘解開響應時間通常在幾十到幾百毫秒以上,因此通信導致的信號延時可以忽略不記。抱閘狀態由所有驅動器共同向總線發送,各驅動器均能獲得任意驅動器的抱閘狀態,其控制架構如圖1所示。
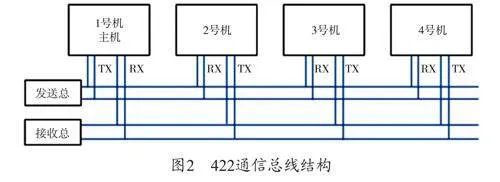
422通信作為全雙工差分多點串口通信,其優點是和SPI一樣能突破1Mbps的速度限制,同時收發異步,支持最多10節點的總線,且串口線長1km時依然能有10Mbps的傳輸速度,其傳輸方式采用差分信號能濾除耦合到兩條線上的信號,差分信號的開關變換是由兩個信號的開關變化較差產生,時序定位精確。驅動器間通信采用422方式,一方面突破了CAN的速度限制,一方面突破了由于時鐘滯后導致的SPI數據錯位問題。但由于采用的422芯片為串口模式,無法切換串口管腳方向。422通信總線結構如圖2所示,TX1只能作為發送,RX1只能作為接收。
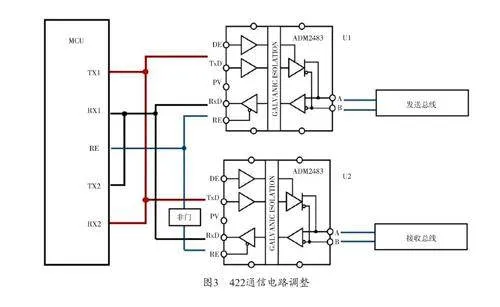
如圖2所示,在發送總線上主機永遠為發送數據,從機永遠為接收數據,同樣的在接收總線上,主機永遠為接收數據,從機永遠為發送數據。如1號為主機時其不斷向發送總線上發送力矩同步信息、主機狀態、抱閘控制、使能控制等信息,而接收總線不斷接收從機發送的速度反饋、電流反饋、系統狀態、以及系統故障。發送總線和接收總線互不干擾,同時由主機廣播決定如何反饋當前信息,避免總線錯誤采用該機制時需要對電路進行調整,以達到通過軟件切換的功能。422通信電路調整如圖3所示。當RE為高時,U1的RE為高,U2的RE為低,此時串口1有效,TX1數據由U1的TXDE發送至發送總線。U2的RE經非門后變為低,RO接收有效,DE變為高阻,接收總線數據由接收總線經U2的RO發送至RX1。如需改變總線可以通過軟件更改RE的電頻,改變串口發送由串口1至串口2發送,即可完成切換。
4 結束語
自動化控制理論適用于多伺服系統功率分散及其控制的應用領域,可進行具有復雜性控制器設備的相關操作,從而精簡控制器邏輯結構。此外,自動化控制理論能夠快速增強系統平穩運行的能力,盡可能降低成本,改進升級多伺服系統內部結構。同時,在多伺服系統功率分散及其控制過程中,自動化控制理論還能減少系統運行時的工作負荷,大幅提升多伺服系統自動化控制的效率。
多伺服系統給工業生產帶來了極大的便利。隨著多伺服系統應用越來越廣泛,相關技術人員必須面對其在發展過程中遇到的問題和挑戰,提高專業素質,為多伺服系統的進一步發展提供支持。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
當代陜西(2022年5期)2022-04-19 12:10:18
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:28
湘潮(上半月)(2021年4期)2021-07-20 08:05:28
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
汕頭大學學報(自然科學版)(2020年4期)2020-12-14 07:05:00
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45