基于無人機點云數據的露天采場道路的三維建模技術研究
2024-12-31 00:00:00劉思洋孟強查日森莎詩萌毛亞純
今日自動化 2024年8期


[關鍵詞]點云數據;三維建模;露天采場;聚類算法;貪心算法
露天采場道路的設計、建設及維護對于提高露天礦山采場的生產效率和安全性具有重要意義。然而,通過感知來穩定獲取路沿信息較為困難。因此,尋求一種快速、高效、精確的三維建模技術,對于露天采場道路的管理和優化具有重要價值。
基于深度學習的道路標志檢測是一種用隱性特征神經網絡處理和分類圖像的方法,能夠顯著提升道路標志提取的精度和算法的魯棒性,相比傳統方法有很大的優勢。景輝[1]主要運用全局特征的神經網絡檢測道路標志,該方法的執行步驟如下:①增強道路標志特征;②基于卷積神經網絡對道路標志進行分塊,快速獲取局部道路標志;③基于K-means算法對其局部進行分割,并通過軟件計算得到局部區域的道路標志。其最終結果能夠實現對道路標志位置的精確修正。
近年來,無人機傾斜攝影測量技術有了很大飛躍,已經可以更高精度地對地物三維模型進行重建,但對于比較復雜的建筑物建模精度仍有不足[2]。激光雷達點云可以直接獲取地物的三維坐標等信息,可以更加直觀精確地展示地物的三維信息[3],為建筑物三維重建提供了更精確的數據支持。
1 數據獲取及預處理
1.1 點云數據的獲取
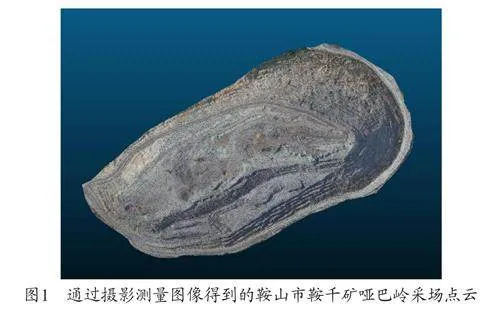
文章應用的是大疆(DJI)M300RTK無人機搭載三維激光掃描儀禪思L1,一體化度集成激光雷達、測繪相機與慣導,每次作業能覆蓋2km2的面積,精度達到5cm/10cm。外業數據采集主要包括現場踏勘、航線設計、設備組裝、設備檢查與調試、飛行采集、設備回收、系統狀態及數據質量檢查等步驟。內業數據處理主要由由Acute3D公司的ContextCapture軟件完成,同時利用Pix4d進行正射影像的生成,具體如圖1所示。
1.2 數據預處理
數據預處理包含以下內容:①將所得正射影像導出的點云數據進行降采樣處理;②采用高斯濾波對降采樣后的點云數據進行處理;③采用歐式聚類算法進行地面點與非地面點分割,并進行坡度濾波;④采用K-means算法將使用歐式算法得到的地面點云進行聚類,如圖2所示。
2 點云數據三維建模
文章所用到的三維建模技術主要包括曲面重建、網格優化及實體生成3個步驟。GeomagicStudio是一款高效的逆向工具,有助于快速、精細地構造出各種復雜的三維結構,并可根據曲面擬合、曲面修復、特征提取等功能,從點云數據中提取道路的幾何形狀和曲率特征,生成高質量的道路模型。
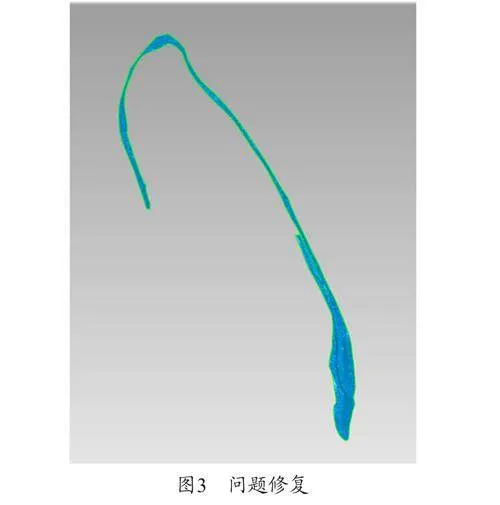
2.1 曲面重建
在曲面重建時采用網格醫生,網格醫生的原理是基于對網格的拓撲和幾何屬性進行分析,找出不符合預設條件的網格元素,并根據不同的修復策略進行修改或刪除,如圖3所示。
2.2 曲面化及網格優化
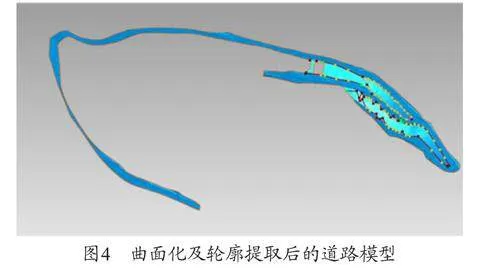
為了實現道路的高質量重建,需要對無人機點云數據進行曲面化處理,即將多邊形網格轉換為NURBS曲面的過程。曲面化可以提高模型的精度和光滑度,以及與CAD/CAM/CAE系統的兼容性,結果如圖4所示。
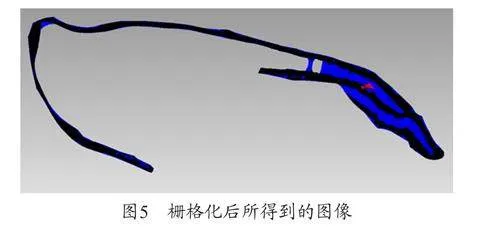
2.3 柵格化
柵格化是指將曲面片轉換為由四邊形或三角形組成的網格的過程。柵格化的原理是基于對曲面片進行曲面分析,根據不同的曲面片類型(如四邊域、三邊域、五邊域等),構造相應的格柵,并利用最小二乘法或其他優化算法擬合出NURBS曲面。柵格化可以控制曲面的形狀和質量,以及與多邊形網格的比較和分析,如圖5所示。
2.4 擬合曲面實體生成
擬合曲面的方法是先劃分曲面片,然后構造格柵,最后擬合曲面。在進行曲面模型建模的過程中,最重要的一步便是確保各個部件的曲率變化都在一定范圍內,以便于準確描述點云的特征,并且減少模型的失真,如圖6所示。
2.5 貪心算法處理
上述結果所得到的三維道路模型在顏色、紋理等方面并不能滿足預期要求,并且模型存在粘連,故需要進行進一步的操作與改進。貪心算法是一種基于局部最優解的優化方法,其在每一步都選擇當前最優的方案,以達到全局最優或近似最優的目標。
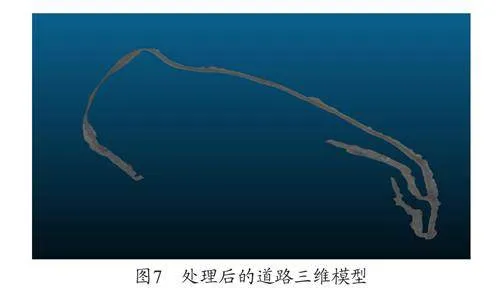
貪心投影三角化算法的基本原理是將點云轉換為三角形,并將其轉換為三維網格模型。具體包括以下流程:通過法線將點云投影到一個二維坐標系中,以便進行分析和計算→通過Delaunay三角剖分的空間區域增長算法→將投影后的點云轉換為平面三角形,從而獲取每個點之間的拓撲關系→將這些關系轉換為曲面模型,以此來實現點云的重建,如圖7所示。
3 結束語
文章基于無人機點云數據對露天采場道路三維建模技術進行了研究,采用的建模流程包括數據預處理、道路特征提取、道路網構建及道路模型建立4個步驟。這一流程能夠充分利用無人機點云數據的高精度、高密度及高靈活性等優點,實現對復雜露天采場道路結構的可視化表示。試驗結果表明,該方法能夠有效地從無人機點云數據中提取并生成露天采場道路三維模型,為露天采場的規劃、設計、管理及監測提供了有力的技術支持。