基于國產PLC的高精度提升機構研究
2024-12-31 00:00:00秦志偉齊濤侯愛林李順
機電信息 2024年22期


摘要:高精度提升機構核心驅動能力來源于4個伺服電機,該機構具備運行過程定位精度高、控制方式多樣、控制響應快等特點。對提升機構控制進行分析,該機構運動控制較為復雜,控制系統應具備運動控制算法庫、位置調節PID專用庫、總線協議等能力。在對提升機構控制方案設計過程中,重點研究了PID控制算法和伺服運動控制算法。依據分析研究對提升機構進行控制方案設計,該控制方案組成包括PID控制算法、伺服運動算法、CANopen冗余、CPU冗余等。通過對高精度提升機構的調試和使用,得出國產PLC產品可以滿足高精度運動機構控制需求的結論。該方案可以為提升機構、頂升機構等的運動控制方案設計提供技術參考。
關鍵詞:CANopen協議;PID控制算法;運動控制算法
中圖分類號:TP391" " 文獻標志碼:A" " 文章編號:1671-0797(2024)22-0006-03
DOI:10.19514/j.cnki.cn32-1628/tm.2024.22.002
0" " 引言
目前國內使用的高精度提升機構動力傳動方式分成兩種:液壓傳動控制和伺服電機傳動控制。其中液壓傳動控制方式控制精度低,設備運行穩定性差,運行停止時會產生振動;伺服電機傳動控制方式主要配件大都采用進口產品或品牌國產化產品,存在產品供貨周期無法保證、核心數據泄露、易受網絡攻擊、技術服務依賴國外、定制化需求無法滿足等風險[1]。
針對以上問題,本文設計了一套基于國產PLC的高精度提升機構。該控制系統以實際應用設備為依托,使用國產PLC、伺服產品,搭建軟硬件設備系統,在運動控制領域得到實際應用。該高精度提升機構具有獨特的運動控制優勢,主要表現為:響應和運算速度快、分辨率和定位精度高、穩定性和可靠性強、聯鎖保護多樣等,因而在發射場、航空、大型船舶、重型工程機械等領域有著廣闊的應用空間。
1" " 高精度提升機構和控制組成
1.1" " 機構結構
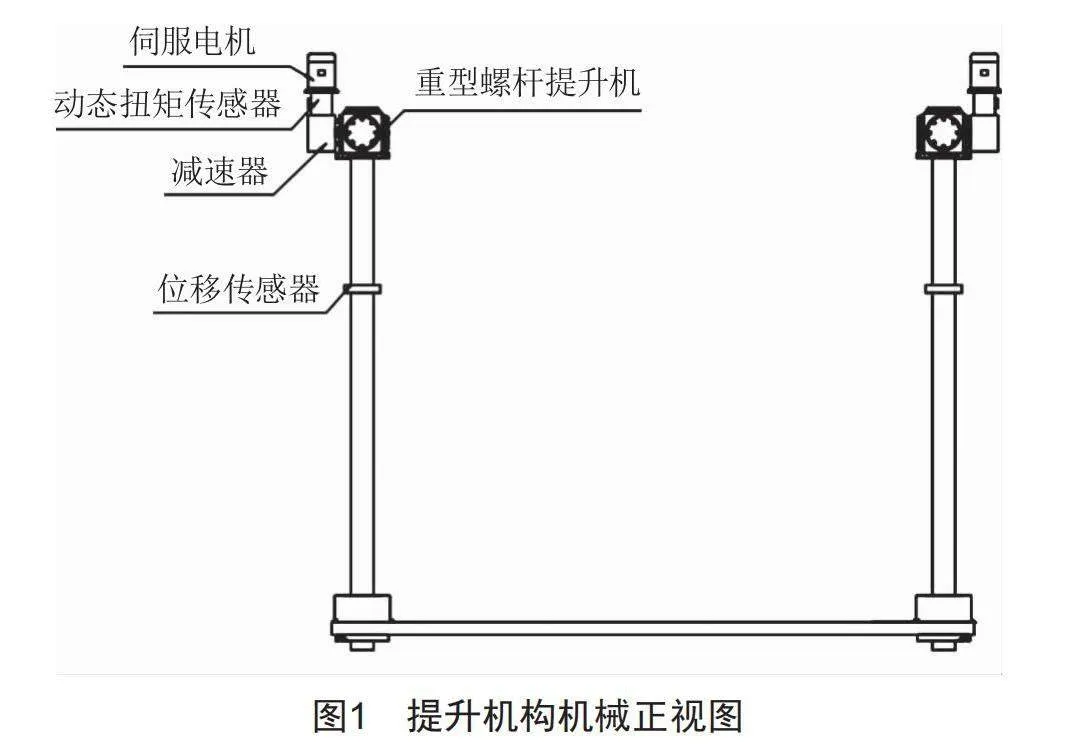
高精度提升機構主要由伺服電機、位移傳感器、扭力傳感器、多級減速機、重型螺桿提升機以及定位系統組成,其中定位系統由4個提升臂的回零部件、位移傳感器以及伺服電機組成。
高精度提升機構的機械結構如圖1所示,提升機構有4個多級減速軸承控制的移動結構,每個結構上帶有位移傳感器,位移傳感器有正向和負向標尺,位移傳感器的零點為各個移動結構的零位置。4個多級減速軸承上裝有扭矩傳感器,用于檢測平臺各角的受力情況,在受力不均衡時啟動保護流程。重型螺桿設備給提升機構提供保持力,使提升設備在斷電情況下保持固定狀態。
1.2" " 控制系統
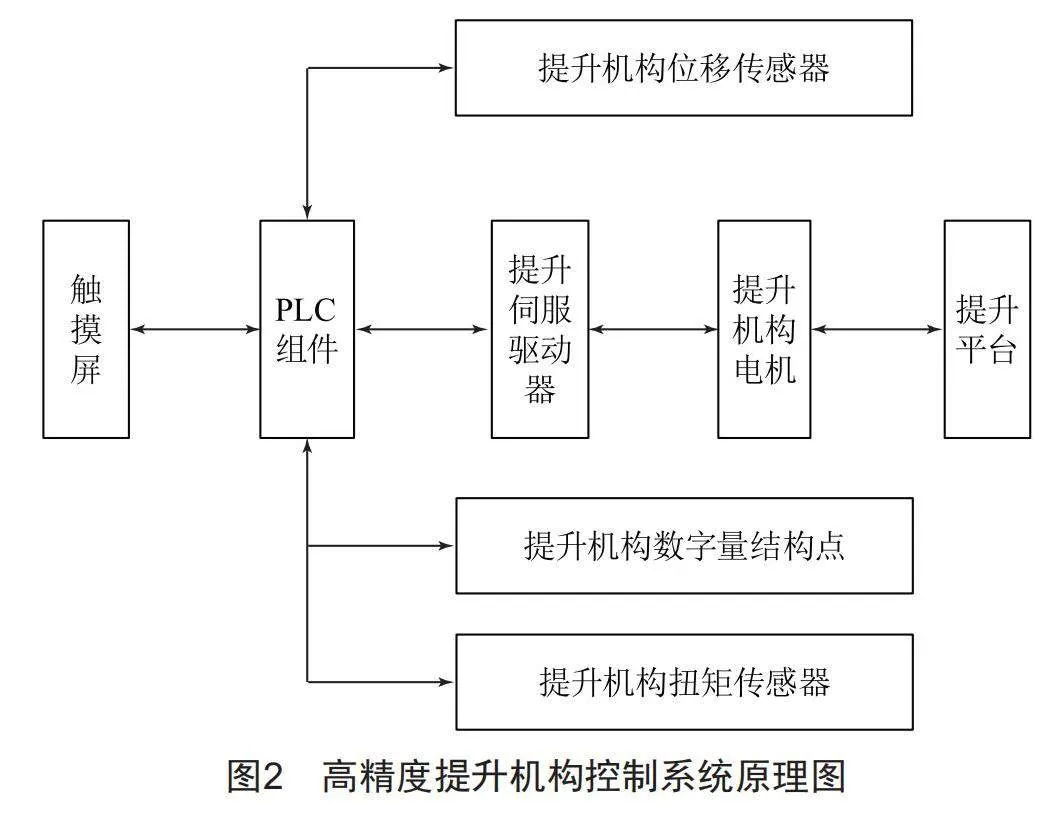
高精度提升機構的控制系統由PLC模塊、觸摸屏、伺服驅動器、設備反饋信號等構成,控制系統原理圖如圖2所示。操作人員在觸摸屏上進行提升機構參數和移動數據的設置,參數下發到PLC模塊;PLC通過CANopen總線與伺服驅動器進行交互,實現驅動器電機狀態數據讀取和伺服電機運行控制;PLC通過AI通道獲取位移傳感器的數據,得出提升機構各角當前位置、平臺傾斜度;PLC通過Modbus通信獲取扭矩傳感器數據,通過算法模型分析和計算得出提升平臺各角受力;提升機構的外圍設備包括到位開關、限位傳感器、設備故障反饋等[2-3]。
1.3" " CANopen冗余通信
高精度提升機構控制系統采用超御IL40系列PLC模塊,配置了CPU冗余、電源冗余、CANopen冗余。其中CANopen冗余采用超御IL40-E6030雙CAN模塊,可大幅提高機構控制的可靠性,具有通信故障恢復時間短,數據信息在主、備通信模塊同時存在的優勢。
2" " 高精度提升機構的算法方案
2.1" " 位置算法和速度算法分析
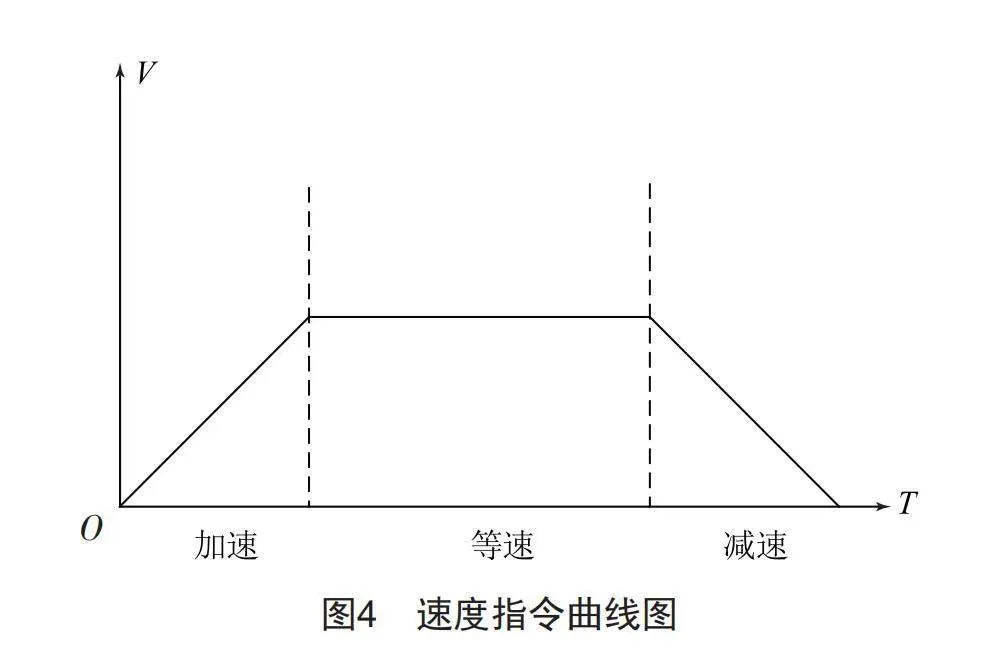
高精度提升設備在運行過程中不但涉及對位置的控制,也涉及對速度的控制,因此對位置算法和速度算法的分析和研究至關重要。提升設備的位置運行曲線如圖3所示,速度運行曲線如圖4所示。
提升機構的位置運行曲線分為啟動階段、等速階段和停止階段,其中啟動階段和停止階段的位置變化為不規則曲線,近似為階躍變化;而等速階段位置值的變化為線性變化,每周期位置值變化量是固定的。提升機構的速度運行曲線分為加速階段、等速階段和減速階段,其中加速階段和減速階段速度變化為線性曲線,等速階段速度值在每周期內是固定不變的。
對圖3、圖4進行整體分析,在提升機構運行啟動階段,機構線性加速運行,啟動階段要求機構擁有快、穩的響應特性,由于啟動階段速度指令在階躍變化,在此階段PID算法不能造成積分飽和和微分累積;在提升機構啟動階段,機構位移按不規則曲線進行累積,因此啟動階段的位置算法按PLC每周期進行分解且不能造成太大誤差。在提升機構運行等速階段,機構勻速運行,此階段速度指令保持恒定且沒有階躍變化,此階段PID算法應快速補償速度及位置偏差且能穩定運行;提升機構位置算法進入等速階段,機構位移曲線為比例特性曲線,在等速階段的位置算法中PLC只需每周期增加固定位移數值即可。在提升機構運行停止階段,機構線性減速運行且時間較短,停止階段要求機構具有防位置過沖、停止位置準確特性,在此階段PID不能進行大的干預和補償以防造成補償過沖;提升機構位置算法進入停止階段,機構位移按不規則曲線進行累積且和啟動階段基本一致,因此PLC的停止位置算法和啟動位置算法函數一致[4]。下面對高精度提升機構的專用PID算法和運行算法進行說明。
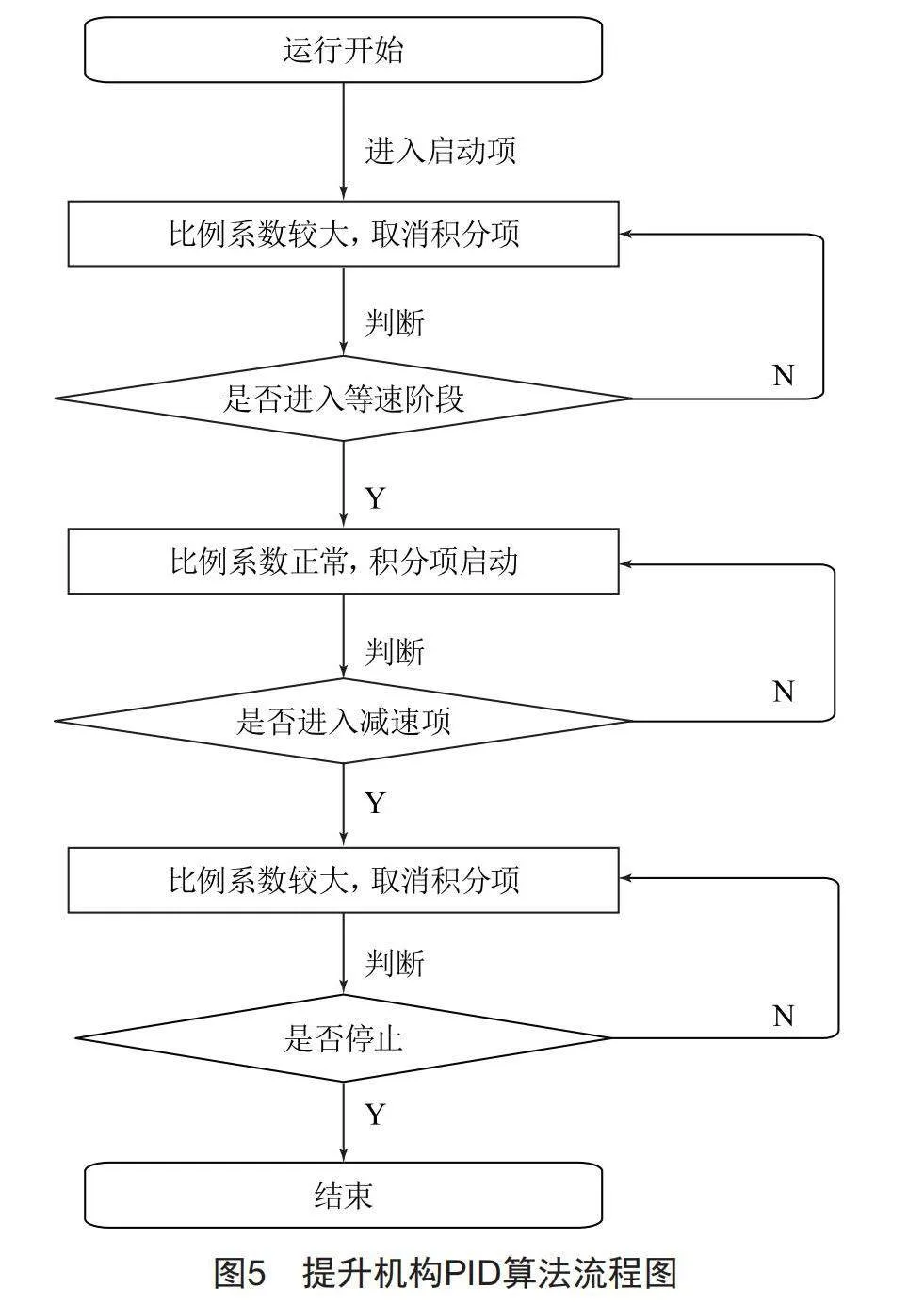
2.2" " 提升機構PID算法
高精度提升機構的PID算法在PLC模塊中完成,機構運行包括啟動階段、等速階段和停止階段,機構啟動和停止階段要求不能造成積分飽和和微分累積,在啟動和停止階段引入積分分離手段以防止積分飽和,在勻速階段引入積分和微分項以消除靜態誤差[5]。PID算法流程如圖5所示。
2.3" " 提升機構位置算法
高精度提升機構的位置控制指標主要包括:控制精度為±1 mm,響應時間不大于100 ms,機構運行范圍為±1 500 mm,速度設定范圍±10~±100 mm/min。
高精度提升機構的控制方式為全閉環控制,提升機構的位置環算法在PLC中完成。位置算法分為三個階段:啟動位置階段、等速位置階段和停止位置階段,啟動階段和等速階段的切換條件為伺服電機速度是否到達勻速值,等速階段到減速階段的切換條件為移動距離是否小于停止階段距離[6-7],機構的停止條件為可移動距離是否小于0.02 mm。提升機構的位置算法流程圖如圖6所示。
3" " 高精度提升機構應用驗證及系統特點
基于國產PLC的高精度提升機構已在某航天設備穩定運行一年多,現對其優點總結如下:
1)位置控制精度可達到±0.8 mm;
2)提升機構速度可設定范圍±5~±130 mm/min;
3)控制系統采用CANopen冗余通信,設備可靠性優于同類產品;
4)提升設備控制模式有同升、同降、對角控制等,應用場合和控制靈活性得到進一步提升;
5)提升機構采用多級減速機和螺桿機構配置,安全性顯著提高。
4" " 結束語
基于超御系列國產PLC高效的控制及通信功能,并配合專用PID算法及位置控制算法,實現對高精度提升機構的控制,在實際應用中取得了良好的效果,可實現對國外同類產品的替代。隨著國產PLC應用領域的不斷拓寬,產品的品種會更豐富、規格更齊全,從而能更好地適應各種工業控制場合的需求,在工業控制領域發揮越來越大的作用。
[參考文獻]
[1] 林浩,楊政厚,霍玉鮮.國產PLC發展現狀及展望[J].電子技術應用,2023,49(4):21-27.
[2] 黃風.運動控制器及數控系統的工程應用[M].北京:機械工業出版社,2015.
[3] 王斌銳,李璟,周坤,等.運動控制系統[M].北京:清華大學出版社,2020.
[4] LAVALLE S M.規劃算法[M].張慶雅,孫東,譯.北京:清華大學出版社,2011.
[5] 楊平,鄧亮,徐春梅,等.PID控制器參數整定方法及應用[M].北京:中國電力出版社,2016.
[6] 王樹明.運動技能學習與控制[M].北京:高等教育出版社,2018.
[7] 胡壽松.自動控制原理[M].7版.北京:科學出版社,2019.
收稿日期:2024-06-13
作者簡介:秦志偉(1989—),男,河北張家口人,工程師,研究方向:工業自動化。