基于UG/ANSYS的液壓挖掘機動臂結構優(yōu)化設計
2024-12-31 00:00:00周磊戴瑜龍曾敏
機電信息 2024年22期




摘要:為增強挖掘機動臂性能,采用UG/ANSYS軟件,對斗山品牌中型液壓挖掘機的動臂結構進行了優(yōu)化設計與有限元仿真分析。首先進行了整體結構的參數(shù)化建模,隨后重點分析了三種典型的運行工況,以確定最危險的工況。在最危險的工況3下,詳細分析了動臂鉸接點的受力情況,并進行了靜力學仿真,從而對動臂結構進行了針對性優(yōu)化。最終,優(yōu)化設計顯著提高了動臂的結構強度和剛度,減少了最大應力和變形,有效延長了設備的疲勞壽命。該研究不僅增強了挖掘機動臂的性能,也為類似工程機械的優(yōu)化設計提供了寶貴的參考。
關鍵詞:液壓挖掘機;動臂優(yōu)化;有限元分析;結構強度;UG/ANSYS
中圖分類號:TU621" " 文獻標志碼:A" " 文章編號:1671-0797(2024)22-0042-05
DOI:10.19514/j.cnki.cn32-1628/tm.2024.22.011
0" " 引言
液壓挖掘機作為工程機械中的重要設備,其性能直接影響工程效率和機械安全。動臂作為液壓挖掘機中承受復雜負載的關鍵部件,其設計優(yōu)化對提高整體機械性能具有決定性作用[1]。本研究選取斗山品牌的中型液壓挖掘機作為研究對象,采用UG和ANSYS軟件工具,基于動臂的危險工況分析和有限元仿真分析,對其結構進行了優(yōu)化設計。通過參數(shù)化建模和優(yōu)化分析,本研究旨在實現(xiàn)動臂結構的最優(yōu)性能,確保機械在復雜工況下的可靠性和安全性。
1" " 液壓挖掘機整體結構設計
1.1" " 性能參數(shù)
液壓挖掘機通過液壓泵轉換發(fā)動機動力,驅動關鍵部件如液壓馬達和缸體,實現(xiàn)作業(yè)設備的控制,具有較好的靈活性與廣泛的適用性。液壓挖掘機性能主要由操作重量、發(fā)動機功率及鏟斗容量三大參數(shù)決定[2]。本研究采用的是斗山品牌中型液壓挖掘機,詳細性能參數(shù)如表1所示。
液壓挖掘機操作過程大致如下:
1)位置移動:挖掘機通過行走馬達驅動行走裝置,移至作業(yè)位置。
2)挖掘動作:動臂油缸、斗桿油缸與鏟斗油缸協(xié)作,進行土石挖掘。
3)土石抬升:動臂油缸收縮,配合斗桿與鏟斗油缸操作,抬升挖掘物。
4)調整卸載方向:回轉臺通過回轉馬達調整,確保正確的卸載方向。
5)土石卸載:控制鏟斗與斗桿油缸動作,將土石卸至指定位置。
1.2" " 三部件參數(shù)化建模
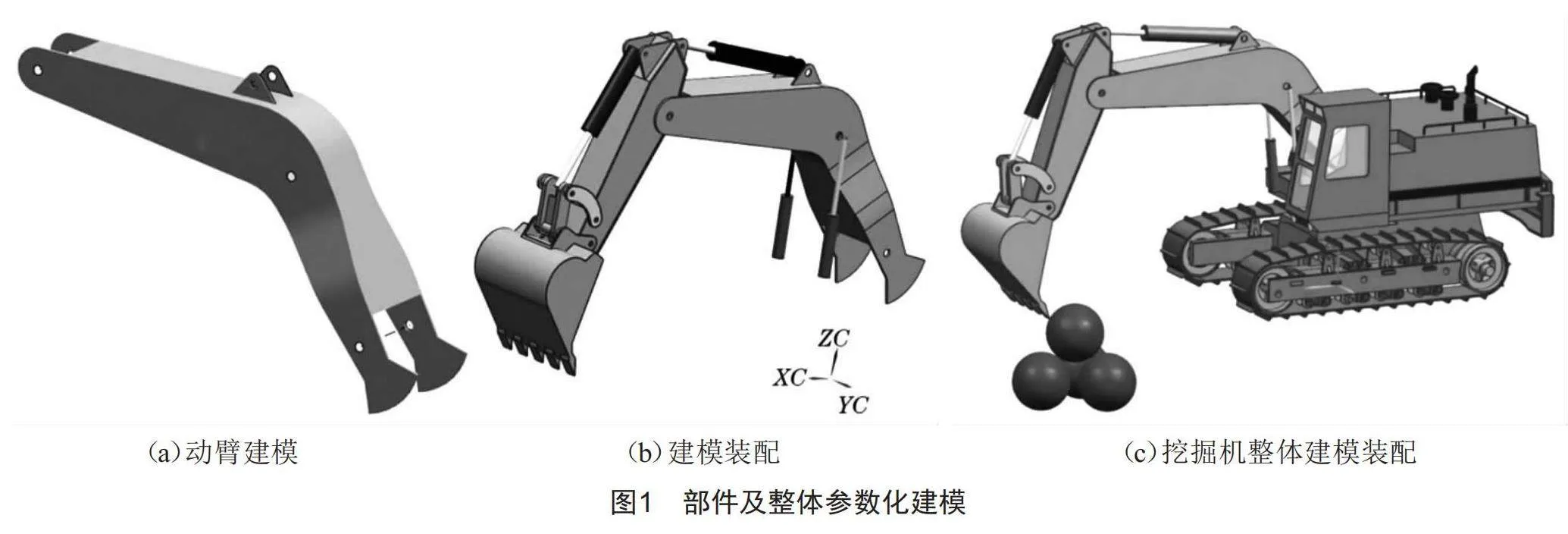
液壓挖掘機主要由工作裝置、回轉裝置和行走裝置三個基本部分構成。工作裝置是挖掘機的核心,包括動臂、斗桿、鏟斗、液壓油缸等關鍵組件。動臂的設計特別重要,它通常采用輕質高強度的結構,由多種厚度的鋼板焊接成箱形結構,通過分段式設計如三段式翼板和多段式腹板優(yōu)化其承載能力和耐用性,如圖1(a)所示。使用UG軟件進行動臂的參數(shù)化建模,這種設計方式允許按照鉸鏈孔的相對位置進行精確裝配,從而確保挖掘機各部件協(xié)調運作,如圖1(b)所示。此外,為簡化建模過程,回轉裝置和行走裝置的模型被簡化處理,這樣有助于快速組裝挖掘機的三大主要裝置,構成一個完整的三維結構,也有助于直觀展示不同工作狀態(tài)下挖掘機各鉸鏈點的應力情況,從而驗證設計的合理性和結構的穩(wěn)定性。挖掘機整體建模裝配如圖1(c)所示。
2" " 液壓挖掘機動臂優(yōu)化設計
2.1" " 基于危險工況的動臂有限元仿真分析
2.1.1" " 比選危險工況
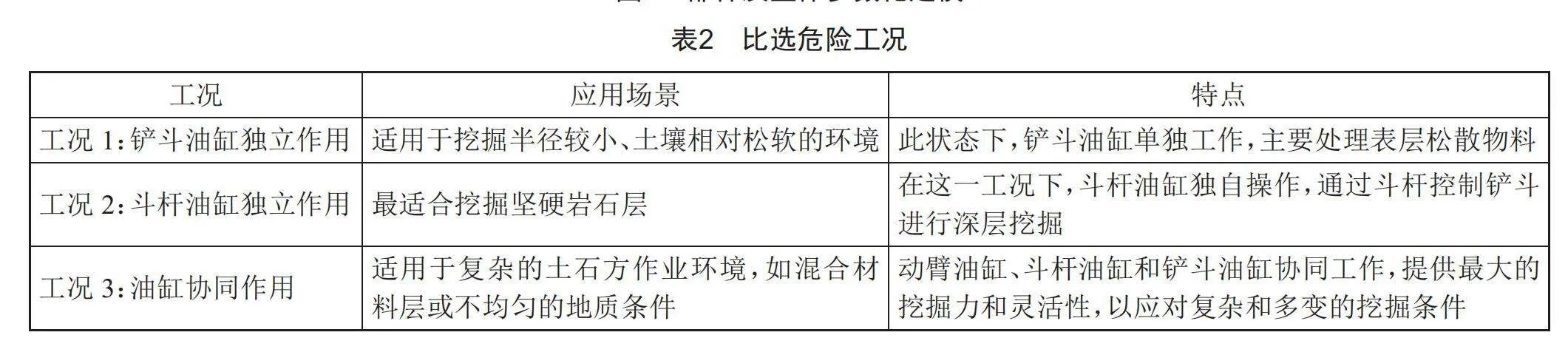
液壓挖掘機運行時,會遭遇多種復雜的挖掘環(huán)境,需精準分析其運行狀況以識別潛在的風險工況。表2詳細分析了液壓挖掘機的不同工作特點和應用場景。
在工況3中,液壓挖掘機各鉸鏈點受到的力差異顯著,使得此狀態(tài)成為最具挑戰(zhàn)性的危險工況。由于其復雜性,需要進行細致的力學分析和結構校驗,確保挖掘機在操作過程中的安全性和效率。這種分析能幫助識別潛在的弱點和應力集中區(qū),從而進行必要的設計調整和強化,以適應高負荷工作的需求。
2.1.2" " 動臂鉸接點受力分析
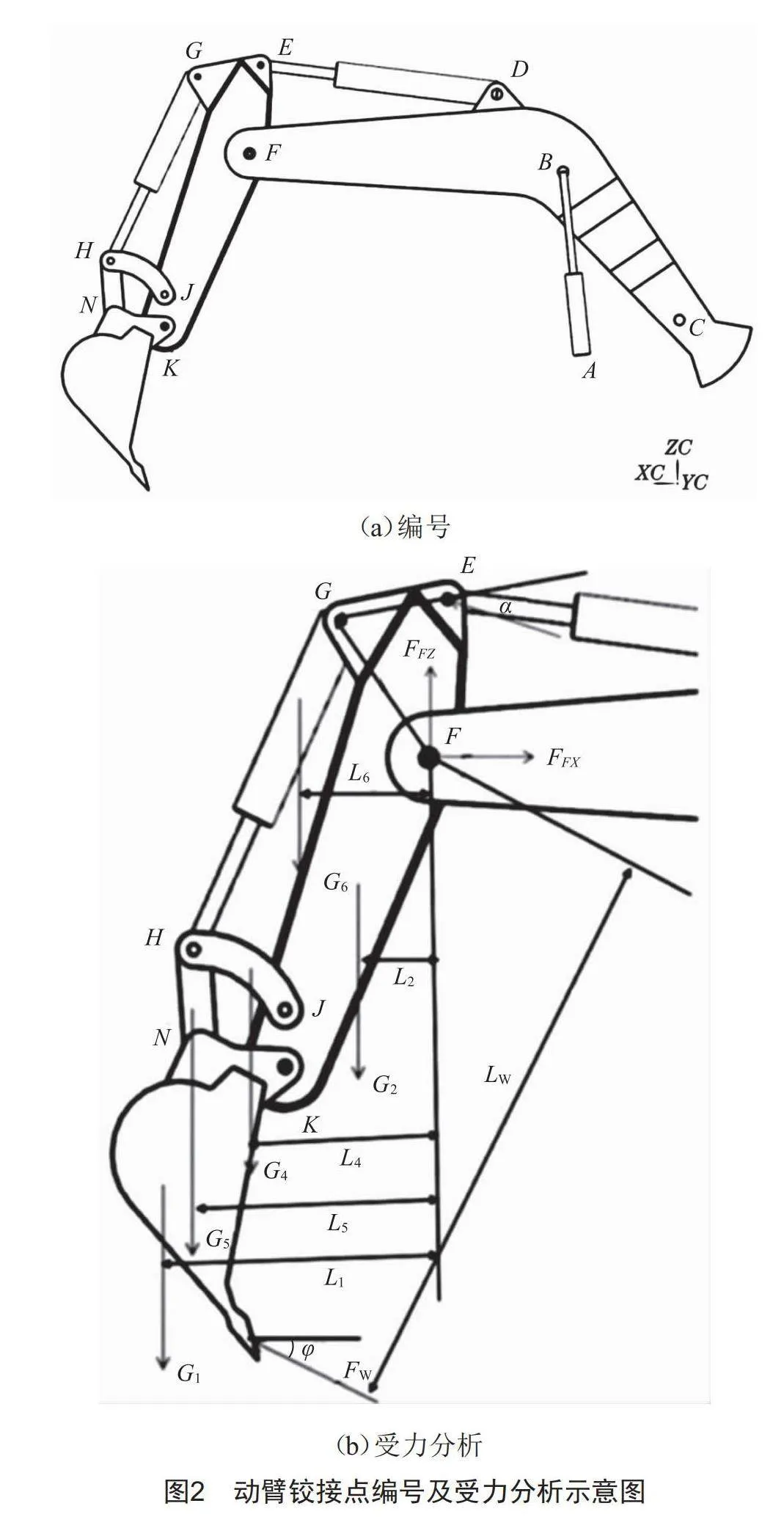
在液壓挖掘機的工作裝置分析中,采用X-Z平面作為參考基準,編號并分析動臂、搖臂、油缸等部件的鉸接點,如圖2(a)所示。忽略偏載和鉸點摩擦影響,并假設所有情況處于靜止狀態(tài)。通過將連桿、搖臂和油缸簡化為二力桿,應用力矩平衡和力平衡原理,計算這些鉸接點在X和Z方向上的受力情況。針對動臂部分的具體分析,將動臂視為獨立部分,其他部分視為剛性整體。重點關注動臂鉸接點B、C、D、F的受力情況。由于所有鉸接力都在X-Z平面內,因此可以通過這些鉸接點在X、Z方向上的分力進行受力分析,如圖2(b)所示。下文以鉸接點F為分析中心,計算動臂與斗桿連接點F以及動臂與斗桿油缸連接點D承受的載荷,這樣有助于有效評估液壓挖掘機工作裝置在不同工況下的受力情況,從而進行更準確的設計和優(yōu)化。
為全面理解并分析液壓挖掘機工作裝置在各種工作狀態(tài)下的力學行為和穩(wěn)定性,根據液壓挖掘機工作裝置的力矩平衡和力平衡方程可得:
∑MF=∑FX=∑FZ=0" " " " " " " "(1)
式中:MF表示力矩;FX表示作用在X方向的力;FZ表示作用在Z方向的力。
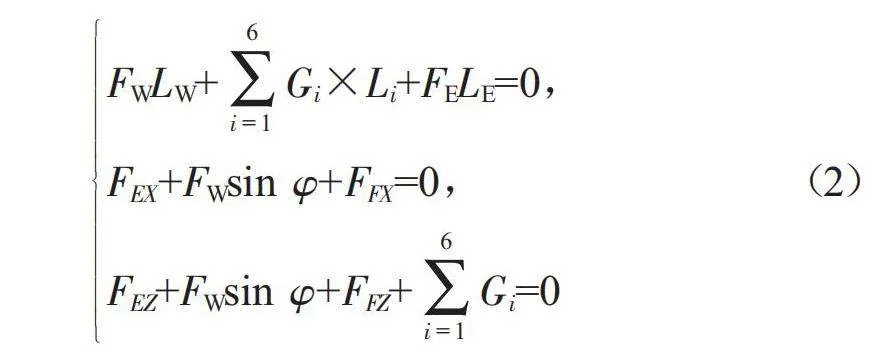
這是液壓系統(tǒng)靜態(tài)平衡的基本條件,用于確保系統(tǒng)在任何給定條件下都處于平衡狀態(tài)。考慮圖2中已知的各部件受力,可以將這些力值代入方程(1),展開求解,得到:
FWLW+
Gi×Li+FELE=0,
FEX+FWsin φ+FFX=0,
FEZ+FWsin φ+FFZ+
Gi=0" " " " " (2)
式中:FW、Gi、FE分別代表斗桿油缸的力、各部件的重力以及搖臂的外力;LW、Li和LE是相應的作用距離;FEX、FEZ分別表示斗桿油缸與斗桿鉸接點E在X方向和Z方向上的受力;FFX、FFZ分別表示動臂與斗桿鉸接點F在X方向和Z方向上的受力;φ是鏟斗的挖掘角度。
各力的分量關系如下:
FEX=FEcos α,
FEZ=FEsin α" " " " " " (3)
式中:α是斗桿油缸傾斜角,鏟斗的挖掘角度和斗桿油缸傾斜角影響力的水平和垂直分量。
通過代入理論挖掘力、各組件自重以及作用點的力臂長度到上述力矩平衡和力平衡方程中,可以聯(lián)立求解得到以下力的分量:FEX、FEZ、FFX、FFZ。
此外,計算時,將斗桿油缸視為一個直桿。基于牛頓第三定律,可知動臂與斗桿油缸的鉸接點D的載荷將與斗桿油缸與斗桿的鉸接點E的載荷在大小上相等,但方向相反。因此,可以得出動臂與斗桿油缸鉸接點D的受力:在X方向和Z方向上的力分別為FDX和FDZ。
選擇工況3進行分析,此工況中,三個油缸協(xié)同作業(yè),且鏟斗的切向挖掘力取動臂、斗桿和鏟斗三者中的最大理論挖掘力。通過將此最大挖掘力值及其他相關參數(shù)代入已有力學方程,可計算出此工況下的關鍵力學數(shù)據,具體如表3所示。
2.1.3" " 有限元仿真分析
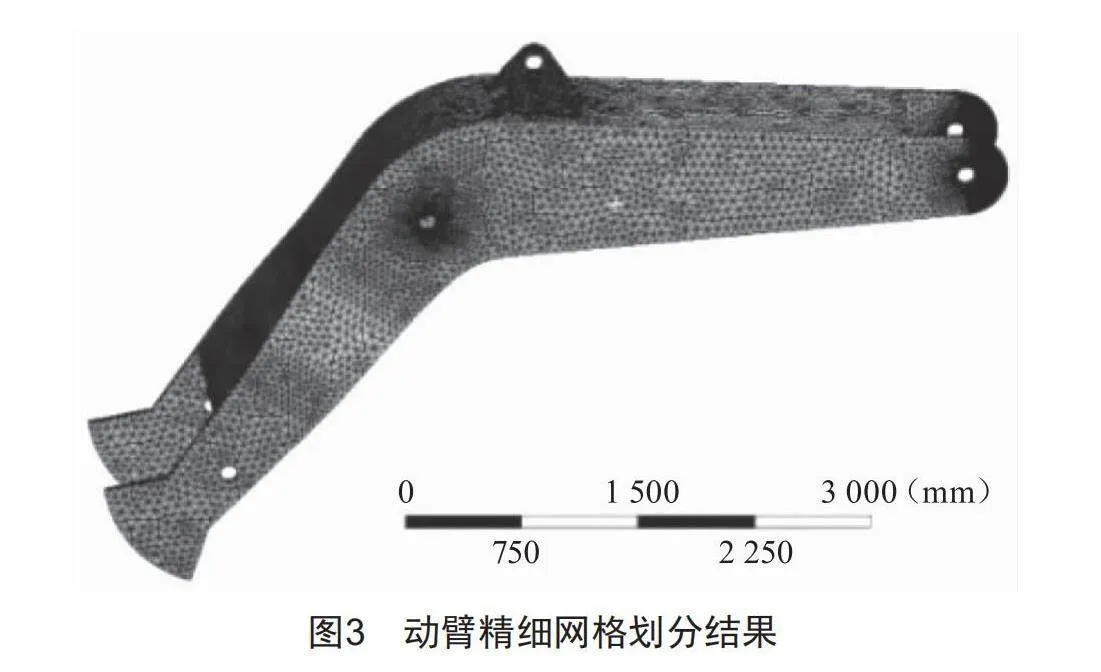
在使用UG和ANSYS Workbench軟件創(chuàng)建并優(yōu)化動臂的三維模型后,采用Static Structural模塊進行靜態(tài)力學分析[3]。模型導入后,通過Design Modeler工具細化處理,并在Geometry中指定動臂材料屬性為結構鋼Q345D,具體包括泊松比0.3,彈性模量206 000 MPa和屈服強度345 MPa。網格劃分采用四面體網格,主要網格大小設為40 mm,關鍵區(qū)域如鉸接點和耳板處的網格則分別細化至10 mm和15 mm。此外,設置網格過渡為Slow,以優(yōu)化計算效率和精度。動臂的網格劃分結果如圖3所示。
在進行危險工況下動臂的靜力學分析之前,首先需要調整坐標系統(tǒng),使之基于動臂模型而非挖掘機的基座。為準確模擬鉸接點的力作用,本次采用了Bearing Load在鉸接點施加載荷,并考慮了動臂自重的影響,通過設置標準地球重力,將Z軸的重力方向設置為負[4]。此外,為了抵消結構體兩端的輕微不平衡力,本次加入了弱彈簧來消除由這種不平衡造成的剛性位移,并模擬鉸接運動。在遠端位移設置中,對X、Y和Z方向的位移進行了約束,具體設定如下:RotX、RotY和RotZ分別為0、自由和0。
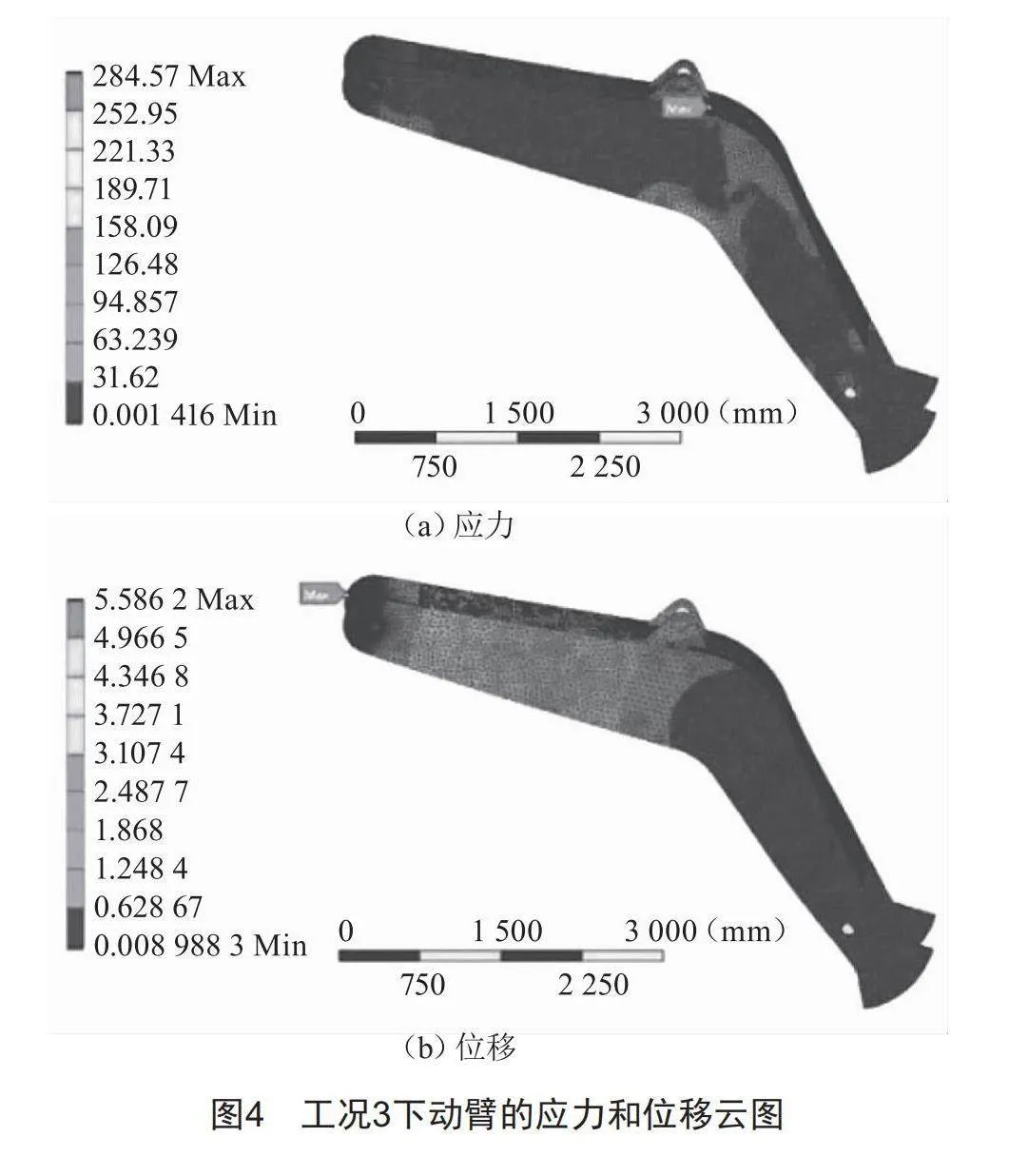
通過求解方案,本次添加了等效應力和總變形的分析,以獲取工況3下動臂的應力云圖和位移云圖,如圖4所示。為了便于進行強度分析,在DM模塊中還特別添加了一個最大值指示標,以突出顯示關鍵的應力區(qū)域。
工況3下,動臂的最高應力為284.57 MPa,低于安全極限345 MPa,主要集中在上翼板與耳板連接區(qū);動臂與斗桿、油缸鉸接處也出現(xiàn)應力集中。動臂的最大位移為5.586 2 mm,主要位于動臂前端,表明動臂的結構強度和剛性都符合設計及工作標準。
2.2" " 液壓挖掘機動臂結構優(yōu)化設計
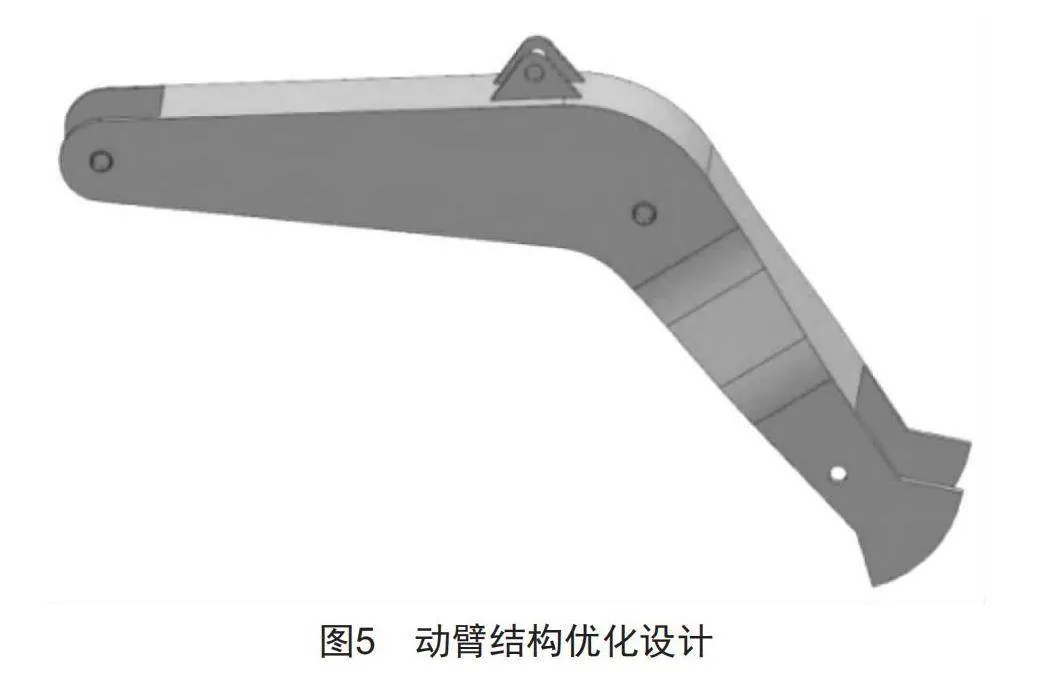
動臂結構的優(yōu)化設計主要包括以下幾個關鍵點:
1)增厚耳板:為了減少耳板與上翼板連接處的應力集中,耳板的厚度增加至50 mm。
2)動臂與斗桿鉸接處的結構改進:在動臂與斗桿鉸接處的兩側分別增加一個中空圓臺,圓臺尺寸如下:139 mm×145 mm×16 mm(上圓直徑×下圓直徑×高)。
3)動臂與油缸鉸接處的結構改進:與2)相類似,在動臂與動臂油缸鉸接處的兩側也各增加一個中空圓臺,圓臺尺寸如下:129 mm×140 mm×16 mm(上圓直徑×下圓直徑×高)。
這些措施旨在降低應力集中,減少變形,從而提高動臂的工作性能,延長其使用壽命[5]。優(yōu)化后的結構設計如圖5所示。
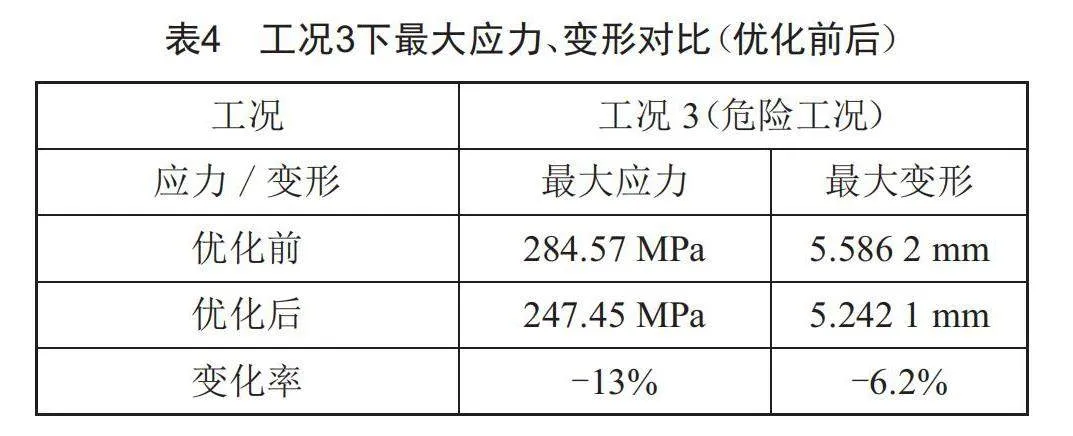
對優(yōu)化設計后的動臂結構進行靜力學分析,獲取優(yōu)化后的動臂結構在最危險工況(工況3)下的最大應力、變形情況,如表4所示。
在工況3下,優(yōu)化后的動臂結構最大應力和最大變形值相比原結構分別降低了約13%和6.2%。這一顯著的改進不僅表明應力集中現(xiàn)象得到了有效消除,還說明優(yōu)化的結構完全滿足材料的強度和剛度要求,進一步驗證了優(yōu)化設計的有效性和實用性。
3" " 結論
1)本研究使用UG/ANSYS軟件,以斗山品牌的中型液壓挖掘機為例,進行了整體結構的參數(shù)化建模與動臂優(yōu)化設計。
2)分析了三種典型運行工況,識別出工況3(動臂油缸、斗桿油缸與鏟斗油缸協(xié)同作業(yè))為最危險工況,并對動臂鉸接點D、F在X、Z方向的分力進行了計算。
3)工況3的靜力學分析表明,動臂最大應力達到284.57 MPa,最大位移為5.586 2 mm,強度和剛度均符合要求。動臂耳板部位應力最大,存在應力集中。
4)對動臂耳板及其他薄弱部位進行結構優(yōu)化,使最大應力和變形分別減少13%和6.2%,有效延長了設備的疲勞壽命,并為類似工程機械設計提供了實用的參考。
[參考文獻]
[1] 陳霞,劉強,張淼.中型液壓挖掘機動臂多目標優(yōu)化設計及驗證[J].工程機械,2024,55(4):127-130.
[2] 張晉剛,劉世權,朱海濤,等.基于SYSWELD的新型動臂構件焊接工藝仿真優(yōu)化[J].金屬加工(熱加工),2023(9):52-55.
[3] 曹佳潭,劉學淵,郭子駿,等.基于ANSYS的綜合農用車后立柱分析與優(yōu)化[J].汽車實用技術,2023,48(22):80-84.
[4] 王亮,孫建華,劉柏森,等.基于UG建模的球類零件輕量化結構設計與力學分析探究[J].模具技術,2023(6):68-75.
[5] 劉旋,萬一品,周宇杰,等.大型挖掘機工作裝置動臂結構有限元仿真分析[J].機械研究與應用,2022,35(6):15-17.
收稿日期:2024-06-05
作者簡介:周磊(1984—),男,湖南常德人,建筑幕墻施工工程師,研究方向:高效能施工機械、模塊化與標準化施工機械。