基于雙目視覺的變電站巡檢機器人故障點定位方法
2024-12-31 00:00:00孫錦釗慕愛東孫夢陽
今日自動化 2024年9期
關鍵詞:變電站


[摘 要]由于變電站通常位于偏遠地區,其運行環境較為惡劣,實際運行中設備與線路故障時有發生,故提出基于雙目視覺的變電站巡檢機器人故障點定位方法。在巡檢機器人上搭載雙目攝像機,基于雙目視覺技術獲取變電站故障點的巡檢圖像,預處理所獲取的變電站巡檢機器人故障點雙目圖像,對預處理后的雙目圖像中目標故障點進行立體匹配,獲得故障點定位結果。實驗結果表明,設計方法下變電站巡檢機器人故障點定位結果的相對誤差僅0.84%,定位精度較高。
[關鍵詞]雙目視覺;變電站;巡檢機器人;故障點;定位方法
[中圖分類號]TM63 ;TP242.6 ;TF089 [文獻標志碼]A [文章編號]2095–6487(2024)09–0179–03
我國變電站通常位于較為偏遠的地區,日常運行中存在嚴重安全隱患,其巡檢工作至關重要,通過巡檢準確定位故障點可幫助運維人員迅速找到并修復故障,從而縮短故障停電時間,提高電力系統的可靠性。傳統變電站巡檢工作主要依賴人工方式,存在巡檢周期長、效率低下、故障點定位精度較差等問題,而開發一種智能化的變電站故障點定位方法,對于提高變電站的巡檢效率、降低巡檢成本、保障電力系統的安全穩定具有重要意義。
近年來,已有較多學者對變電站巡檢機器人故障點定位方法進行了研究,例如,文獻[1] 中,為提升變電站智能巡檢效率與準確率,引入圖神經網絡對二次回路故障點進行定位,圖神經網絡復雜性較高,在面對復雜的變電站二次回路結構時,可能難以保障故障點定位精度;文獻[2] 中,將CEEMD 和PSD 算法結合在一起進行變電站電力電纜故障點定位,可解決現有FDR 方法下故障點定位誤差較大的問題,但該方法對噪聲較為敏感,實際應用中如果變電站噪聲水平較高,會影響故障點定位的準確性。
針對現有研究成果的局限之處,文章提出一種基于雙目視覺的變電站巡檢機器人故障點定位方法,期望可為變電站的預防性維護提供可靠數據支持,以降低變電站故障發生的概率。
1 基于雙目視覺獲取變電站故障點巡檢圖像
為提升變電站故障點的定位效率,文章通過在變電站內設置巡檢機器人執行巡檢任務,并在機器人巡檢過程中,搭載雙目攝像機,實時采集變電站故障點的巡檢圖像。一般來說,當巡檢機器人身上搭載雙目攝像機后,這兩個攝像機之間的距離是已知且固定的,通過雙目相機模擬人類雙眼的視差,即可實現對變電站故障點的立體感知。采用巡檢機器人搭載雙目攝像機對變電站故障點圖像進行采集時,關鍵在于雙目立體視覺模型的建立,假設變電站三維空間內某故障點在雙目相機坐標系下的位置坐標分別為(XL,YL,ZL)、(XR,YR,ZR),將該三維坐標點投影至平面上,得到雙目圖像上對應像素坐標分別為(xL,yL)、(xR,yR),那么根據二者之間的關系構建雙目立體視覺模型數學表達式如下所示:
式中,(uL,vL)、(uR,vR)分別為雙目立體視覺模型中圖像像素的左、右坐標系,(u1,v1)為雙目圖像的實際坐標點,F為平移向量,f為雙目攝像機的焦距,D為雙目攝像機的視差。
文章基于上述雙目視覺原理,即可通過模擬人類雙眼的視差原理,實時獲取具有視差的變電站故障點雙目巡檢圖像,在該雙目巡檢圖像中包含了變電站內故障點的深度信息,可為后續故障點定位提供重要的數據基礎。
2 預處理變電站巡檢機器人故障點雙目圖像
在變電站內巡檢機器人巡檢過程中,受巡檢環境與雙目攝像機自身精度等因素影響,原始獲取的故障點雙目圖像存在一定質量問題,所以為提升故障點定位精度,在定位之前需要對雙目圖像做一系列預處理。
(1)為減少計算量并提高圖像處理速度,文章對原始變電站巡檢機器人故障點雙目圖像做灰度化處理,也就是將彩色圖像轉化為灰度圖像,灰度圖像是僅包含亮度信息的圖像,其像素值范圍通常為0~255,有利于后續處理,具體處理公式如下式所示:
式中,H(x,y)為灰度變電站巡檢機器人故障點雙目圖像,r(x,y)、g(x,y)、b(x,y)分別為原始彩色雙目圖像的紅、綠、藍3個顏色分量。
文章采用式(3)所示的平均值法,將彩色雙目圖像轉化為灰度圖像。
(2)為增強圖像對比度,對變電站巡檢機器人故障點雙目圖像做直方圖均衡化處理,也就是通過拉伸圖像的像素強度分布范圍,使其更加均勻,從而增強圖像的視覺效果,其表達式如下式所示:
式中, 為均衡化處理后的變電站巡檢機器人故障點雙目圖像灰度值,si為雙目圖像中灰度級為i的像素點數量,S為雙目圖像中像素點總數量,h為雙目圖像的灰度級數。
通過式(4)的預處理,變電站巡檢機器人故障點雙目圖像的對比度可以增強,細節信息更加突出。
(3)為去除變電站巡檢機器人故障點雙目圖像中噪聲,引入高斯函數,對原始雙目圖像做平滑處理,表達式如下式所示:
式中,L(x,y)為高斯濾波后變電站巡檢機器人故障點雙目圖像,σ為高斯函數標準差。
通過式(5)對原始變電站巡檢機器人故障點雙目圖像做平滑處理,即可有效去除圖像中噪聲,實現濾波去噪目的。
3 定位雙目巡檢圖像中目標故障點
在獲取并預處理了變電站巡檢機器人故障點雙目圖像后,基于雙目圖像的視差即可進行目標故障點的定位。
(1)為找出兩幅變電站巡檢機器人故障點圖像中目標故障點的對應位置關系,需要對預處理后的雙目圖像進行立體匹配,立體匹配即對兩幅圖像的特征描述子進行相似性匹配。為獲得特征描述子,引入SIFT 特征提取算法。生成描述子的步驟為,在高斯尺度空間內,將關鍵特征點的鄰域劃分為多個尺寸為C×C 的子區域,每一個子區域均存在8 個方向,所以實際過程中需要找到關鍵特征點的主方向,并確保其坐標軸具有旋轉不變性,再將各個子區域內的圖像像素點梯度值一一分配到這8 個方向上,即可獲取原特征像素點(x,y)落在子區域后的坐標值,具體計算公式如下式所示:
式中,l為各子區域的邊長。
根據式(6)確定了原特征關鍵點落在各個子區域后的坐標點后,對各坐標點進行線性插值,即可獲取各個種子點在8 個方向上的梯度,根據這些梯度信息形成關鍵特征點的特征向量,并根據特征點尺度對特征向量進行排序,以此生成變電站巡檢機器人故障點雙目圖像的特征描述子。
(2)根據基于歐氏距離的相似性度量函數來衡量兩幅圖像的特征描述子之間相似程度,選擇相似程度較高的特征點進行匹配,以完成變電站巡檢機器人故障點雙目圖像的立體匹配,并根據匹配像素點坐標計算視差,表達式如下式所示:
D'=x'L-x'R(7)
式中,D' 為變電站巡檢機器人故障點雙目圖像的視差值,x'L 、x'R分別為雙目圖像匹配點的橫坐標。
將各對應像素點視差值組合在一起,生成變電站巡檢機器人故障點雙目圖像的視差圖,再結合雙目相機的幾何參數和視差信息即可計算出故障點的深度信息,表達式如下式所示:
式中,T為深度值,δ為基線距離。
對于視差圖中的每個像素點,都可以根據式(8)計算出其對應的深度值。
(3)根據故障點深度值計算故障點在三維空間中的坐標數據,表達式如下式所示:
式中,(X,Y,Z)為故障點的三維坐標,(u,v)為雙目圖像中故障點的坐標,fx、fy為X、Y方向上的焦距,qx、qy為X、Y方向上的圖像中心點坐標。
因此,文章根據變電站巡檢機器人故障點雙目圖像,即可獲取故障點在實際三維空間中的坐標信息,以此實現故障點定位。
4 仿真試驗
4.1 試驗設置
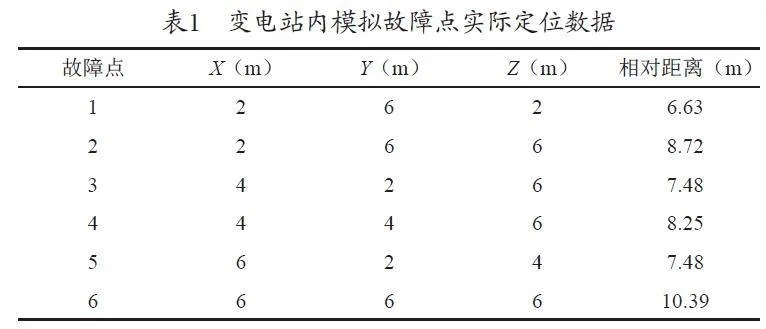
以文章方法作為試驗組,并以文獻[1] 方法和文獻[2] 方法作為對照組,展開變電站內故障點定位的仿真對比試驗。在配備Intel Core i7處理器和NVIDIAGeForce RTX 3060 顯卡的計算機上,使用MATLAB和OpenCV 庫搭建本次變電站內故障點定位的仿真試驗環境。在該仿真試驗環境中,設置6 個已知位置模擬故障點,變電站內模擬故障點實際定位數據見表1。
分別采用文章設計方法、文獻[1] 方法和文獻[2]方法,對表1 所示6 個模擬故障點進行定位測距,并對比所得定位測距結果。
4.2 結果分析
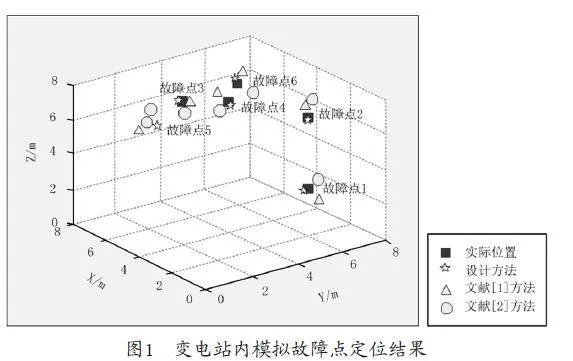
在本次仿真對比試驗完成后,先統計文章設計方法、文獻[1] 方法和文獻[2] 方法下各模擬故障點的三維坐標定位數據,與實際三維坐標一起繪制成如圖1 所示的變電站內模擬故障點定位結果。
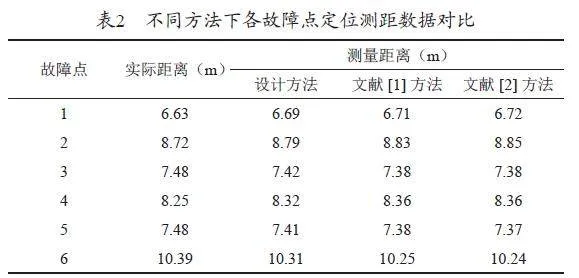
分析圖1 可知,在變電站內8 個已知位置的模擬故障點定位中,與對照組方法相比,文章設計方法下三維坐標定位結果和實際數據之間更接近,說明文章設計方法能夠更準確獲取故障點的三維坐標。為更客觀且直觀地體現文章設計方法的優越性,根據各模擬故障點的三維坐標定位數據,分別計算出故障點的相對距離,作為測距結果,與模擬故障點的實際距離進行對比,見表2。
如表2 所示,在文章設計方法下,變電站內各模擬故障點的定位測距結果與實際相對距離之間的相對誤差均在1% 之內,平均相對誤差為0.84%,較對照組中兩種方法分別降低了0.47%、0.57%。由此可以說明,文章所設計基于雙目視覺的變電站巡檢機器人故障點定位方法是有效且正確的,可在實際變電站故障定位中表現出較高的精度。
5 結束語
文章深入研究了一種基于雙目視覺的變電站巡檢機器人故障點定位方法,該方法通過巡檢機器人搭載雙目相機實時采集變電站故障點的巡檢圖像,經過預處理后對所得雙目巡檢圖像進行立體匹配,即可實現對變電站內故障點的精確定位。與此同時,文章通過仿真對比試驗驗證了設計方法的有效性和優越性,能夠為變電站巡檢機器人的實際應用提供更為可靠的技術支持。未來,將進一步完善該方法,提高其在復雜環境下的適用性和魯棒性,為智能電網的可持續發展作出貢獻。
參考文獻
[1] 張宸滔,鄭永康,盧繼平,等. 基于圖神經網絡的智能變電站二次回路故障定位研究[J]. 電力系統保護與控制,2022,50(11):81-90.
[2] 溫才權,韋鑫,王杰,等. 基于CEEMD-PSD 算法的變電站控制電纜故障定位方法[J]. 電網與清潔能源,2023,39(7):80-89.
猜你喜歡
電子制作(2019年10期)2019-06-17 11:44:56
電子制作(2018年8期)2018-06-26 06:43:34
電子制作(2017年8期)2017-06-05 09:36:15
電子制作(2017年24期)2017-02-02 07:14:44
現代工業經濟和信息化(2016年5期)2016-05-17 05:35:57
東北電力技術(2016年2期)2016-05-17 04:32:54
河南電力(2015年5期)2015-06-08 06:01:45
中國工程咨詢(2015年10期)2015-02-14 05:57:34
水電站機電技術(2014年1期)2014-09-26 11:59:53
中國機械(2014年15期)2014-04-29 00:09:45