限定區域和特定場景智能網聯示范運營中心建設方案探究
2024-12-31 00:00:00林土淦韋俊劉學軍
西部交通科技 2024年7期


摘 要:文章探討了廣西交通職業技術學院的智能網聯示范運營中心建設項目方案。該項目旨在打造智慧交通運輸測試中心,實現特殊區域路側智能交通設備設施網聯化建設,推動道路智能化網聯化建設工作。項目總體規劃覆蓋區域包括限定區域和特定場景。本項目包含車路協同信息服務平臺、車聯網接入平臺和無人駕駛配送及售貨車三個部分。車路協同信息服務平臺與車聯網智能終端進行協同配合,提供事件感知、態勢評估、交通優化、車輛管理、數據交互等基礎數據和應用服務;車聯網接入平臺負責對接不同廠家設備的統一接入和管理,實現多協議適配;無人駕駛配送及售貨車集激光雷達、攝像頭等傳感器于一體,實現無人駕駛配送,提升物流運力與效率,降低成本,優化物流成本結構。
關鍵詞:車路協同;無人駕駛物流車;路徑規劃;A*算法
中圖分類號:U495
0 引言
車路協同技術是實現交通和汽車智能化融合的關鍵技術,能夠提高道路通行效率、降低交通事故率,為智慧交通提供技術支持。車路協同系統(Cooperative Vehicle Infrastructure System,CVIS)是一種利用無線通信技術,實現車輛與車輛、車輛與道路之間全方位信息交互的系統。它可以收集行駛信息并進行車輛的主動安全控制,實現人、車和道路的有效協同,以提高交通安全性和通行效率[1]。車路協同技術的核心為智能車載技術、智能路側技術、通信技術、云控技術等四部分[2]。全國已經建成了4個國家級車聯網先導區,分別是江蘇(無錫)車聯網先導區、湖南(長沙)車聯網先導區、天津(西青)車聯網先導區和重慶(兩江新區)車聯網先導區[3]。廣西區內已建成頗具規模的車路協同技術基礎設施及服務系統,拓展了停車場、智慧加油等多種應用場景,能夠保障向千萬級別的客戶提供完善的服務,也是實現智慧交通最關鍵的階段。因此,深入研究基于車路協同技術的車路站協同一體化關鍵技術具有重要的社會價值和理論意義。
1 總體方案介紹
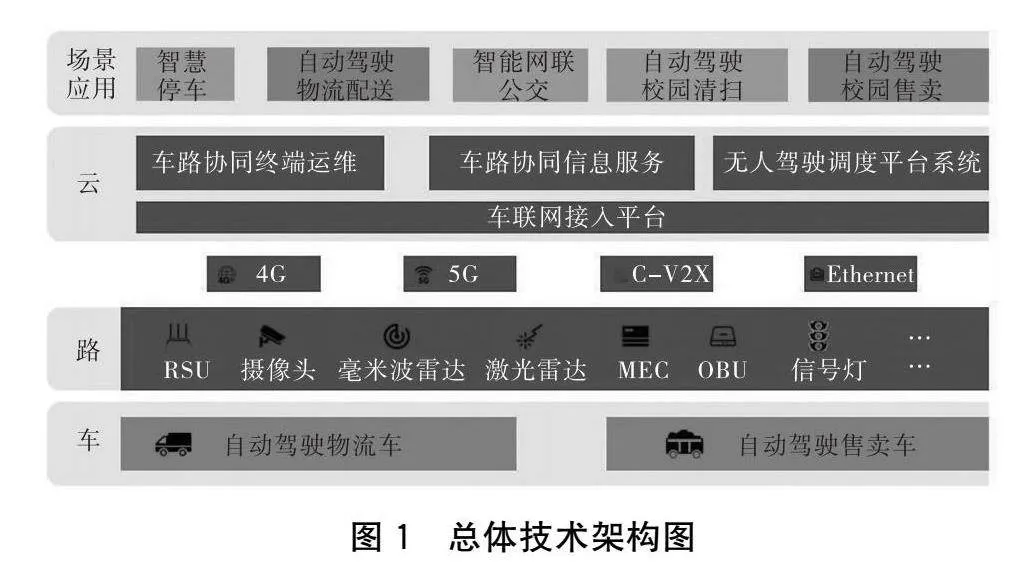
限定區域和特定場景智能網聯示范運營中心位于廣西交通職業技術學院(昆侖校區院內),以新汽車樓與物流校園驛站為終點與起點,運行自動駕駛物流車及自動駕駛售貨車,結合車路協同系統,進行智能網聯運營示范。目標建設適合中國西南地形特征和氣候環境的“路端”基礎設施,建設智慧化交通基礎設施,參照交通運輸部現有的車路協同標準體系,結合交通專業群教學需要,布設路基與路側傳感及通信設備,以先進無線通信和移動互聯網等技術,對交通環境進行實時感知。如圖1所示,建設基于車路協同技術,限定區域和特定場景智能網聯示范運營中心,推進廣西智能網聯汽車商業化發展,提升城市交通基礎設施數字化管理水平,為城市交通智能化發展提供技術動力。
在智能交通領域,示范運營是推動智能駕駛發展的重要環節。通過深入研究特定場景下的運營管理,可以打造具有商業化運營的無人駕駛物流配送及無人駕駛售貨協同創新示范線路。為了確保各車企及后裝V2X產品的互通性,需要制定統一的數據交換標準和接口規范。實地測試場景的建立對于V2X應用的開發、測試和工程化至關重要。根據目前的規劃,設置了滿足《合作式智能運輸系統車用通信系統應用層及應用數據交互標準(第一階段)》的17個場景,這些場景將為網聯車輛在部署有V2X的物流線和觀光線上進行道路測試提供有力支持。
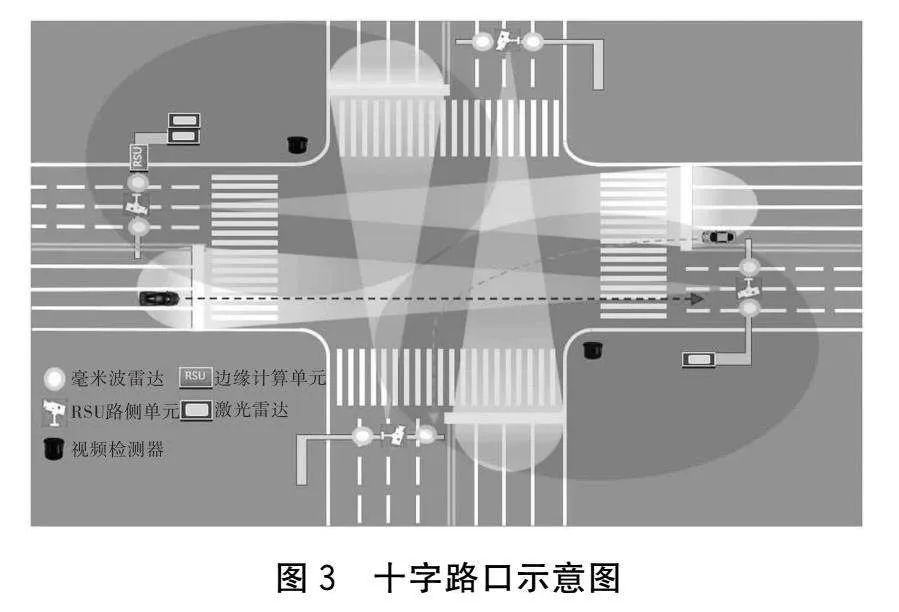
路線長度來回總計2.6 km。如圖下頁2~3所示,根據實際道路信息,整條示范線存在多個交叉路口、彎道、上下坡等,容易造成自動駕駛識別盲區,途徑人流密集區域,容易發生隨機“行人橫穿”,“弱勢交通參與者隨機穿出”等危險場景,需要在每個改造點位布置RSU路側通信單元、路側融感知智慧小站等,形成重要、復雜路段網聯、感知全覆蓋,簡單路段弱覆蓋的部署方案,為自動駕駛車輛提供豐富的道路識別信息支撐其決策控制,同時也可將識別信息通過路側屏等方式露出,提醒非網聯車輛、行人等,起到預警作用。另外,在車載端安裝自動駕駛監控終端,實時采集車輛數據,達到實時監控和車輛異常監控目的。
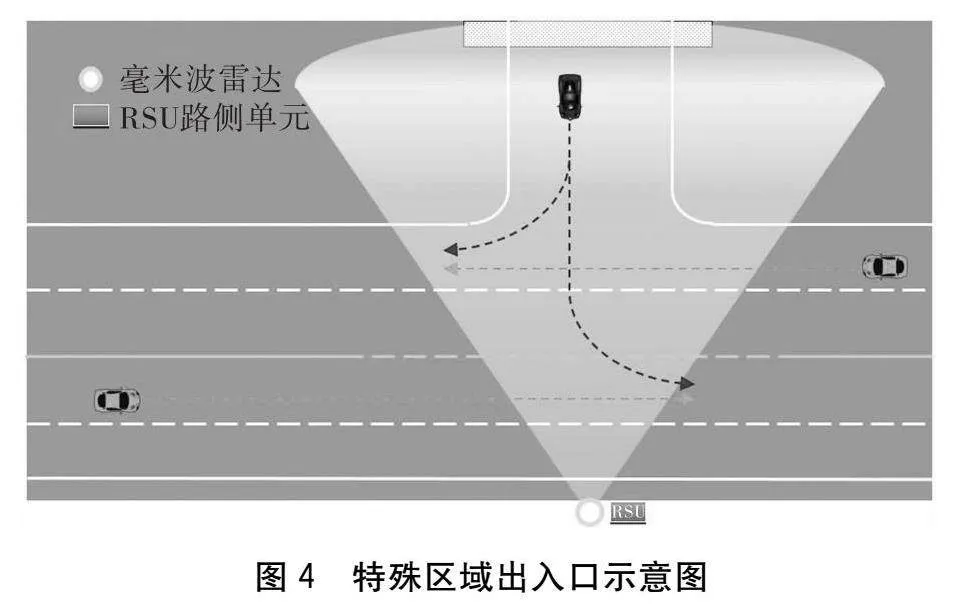
如圖3所示,在十字路口或T型路口,盡可能使停止線以外包含整個路口區域的位置實現感知全覆蓋,通常在對角位置增加激光雷達。若對角有綠化帶將右轉車道進行了隔離,則優先考慮在綠化帶立桿安裝激光雷達。如圖4所示,特殊區域出入口,優先選擇檢測車頭(在馬路對面立桿安裝),檢測范圍須覆蓋出入口進入主路的斷面。若馬路對面無法立桿,則將傳感器裝在出口以外檢測進入主路車輛的車尾。
2 車路協同系統設計
2.1 車路協同系統總體介紹
項目區域內的路側設備系統設計主要包含道路感知子系統、邊緣計算處理子系統、數據通信子系統、數據發布子系統、無人駕駛物流等功能模塊。該系統具有多項特點:(1)通過統計運營區域內網聯車輛的接入數量、實時在線網聯車輛數量以及累計路側設備的接入數量,可以全面了解整體數據信息的發展趨勢;(2)通過統計今日交互信息條數,能夠及時獲取交通運行情況;(3)該平臺還提供車路協同運營統計指數,反映了路端檢測應用場景的布設情況,包括針對十字路口、隧道、城市道路和環島匯入等交通場景的拆分統計情況,以及發布的交通運行事件類型和數據來源分布的數量占比;(4)該平臺還具備設備運維服務分析指數,實時統計設備的在線分布率和數量,并分析累計運維任務的狀態以及運維類型的分布趨勢。通過這些關鍵指標,用戶可以全面了解車路協同系統的運營狀況和設備運維情況。
2.2 車路協同系統路側設備介紹
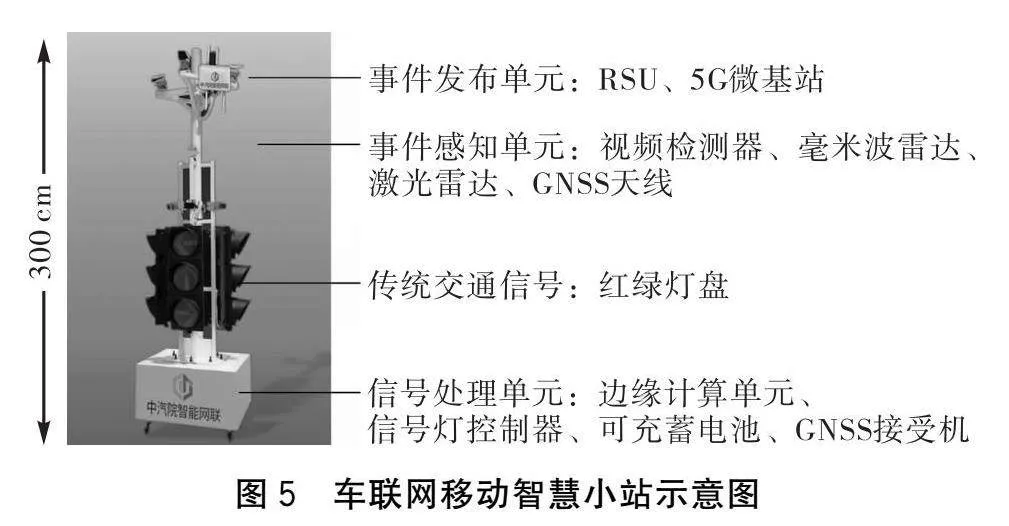
車路協同系統由道路感知子系統、邊緣計算處理子系統、數據通信子系統和車聯網移動智慧小站四個子系統構成。道路感知子系統通過在路側新建或利舊桿件上部署多源傳感器,如毫米波雷達、激光雷達、視頻檢測器等,將桿件部署的設備配套網線電源線經抱箱匯聚至該路口節點機柜,通過5G網絡無線回傳至應用服務中心,實現交通數據采集。邊緣計算處理子系統通過路側部署邊緣計算單元(MEC),完成傳感器數據的接入與處理,實現交通目標的檢測。數據通信子系統通過RSU(路邊單元)通過C-V2X技術廣播V2X消息至車端OBU(Ont-BoardUnit),實現節點感知結果信息、信號機狀態信息等信息的傳遞,并與平臺對接實現信息下發。如圖5所示,車聯網移動智慧小站則是一種移動式一體化MEC基站,集成邊緣計算單元、RSU、低延時網絡相機、毫米波雷達、激光雷達、GNSS接收終端、智能信號燈系和可充電源,可支持打造面向車企、高校的V2X柔性測試場景。該產品具有零作業施工、零標定協調,開機即用的特點,現場無須通電通網。可以在極簡條件下,直接將設備充好電放置路邊,一個動態廣場即可模擬多種測試場景,支持個性化選配感知方案,定制化連續V2X測試場景方案。該車路協同系統具有快速部署和靈活性等優點,能夠提升交通運行效率和安全性。
2.3 無人駕駛配送及售貨車
如圖6所示,無人駕駛物流車面向末端物流場景打造,可實現到用戶手中的最后一公里配送,解決目前配送成本、配送效率、配送時效等行業痛點問題,通過云端調度平臺在最短時間內提供最優配送方案,提升用戶體驗,實現室外場景的無人物流配送。該車集激光雷達、攝像頭等傳感器于一體,實現了特定場景下的無人駕駛配送,讓物資轉運和配送不再只依賴人力,可以自主完成指定目的地之間的運輸工作。無人駕駛物流車具有7×24 h全天候、全流程作業,云端大數據智慧管理,優化物流成本結構,多重安全機制,自動駕駛和手柄遙控模式,人機交互、精確靠站、定點接駁、循跡行駛、緊急響應、行李貨物防護,靈活的收寄件時間和地點,標準接口平臺,快速充電和全自動任務排序送達等功能。
無人物流小車調度系統通過小程序呼叫車輛,也可以制定固定路線,在指定地點停靠,待取貨物。統計平臺通過后臺配送數據,可進行數據分析。
3 車路協同系統路徑規劃
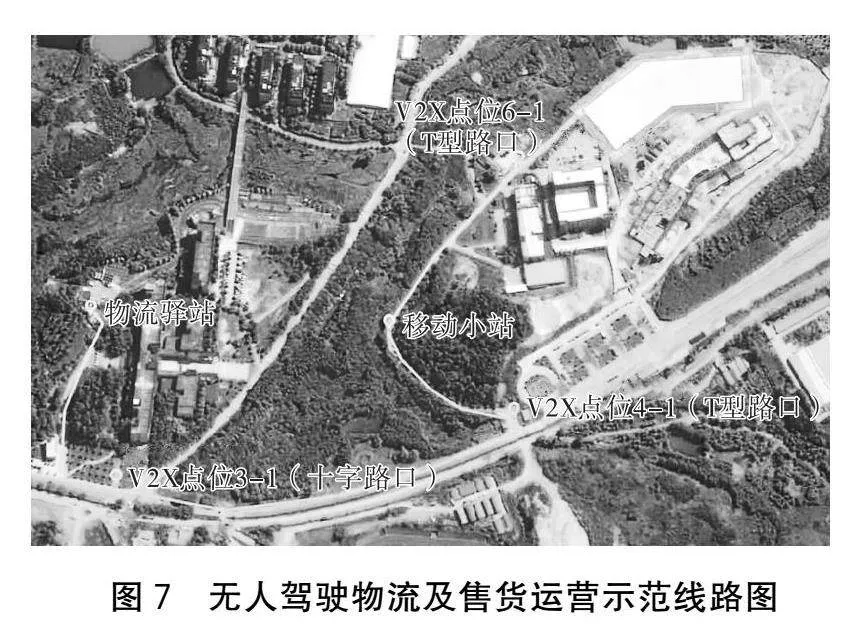
物流車路徑規劃算法是為了最優化物流配送過程中的路徑選擇而設計的,如圖7所示,無人駕駛物流及售貨運營示范線路,設有5個站點,合理規劃物流車運營路線能夠提高物流運輸效率,減少時間和成本,提高服務質量,滿足客戶需求。常用的物流車路徑規劃算法包括最短路徑算法(如Dijkstra算法和A*算法)、蟻群算法、遺傳算法、禁忌搜索算法、動態規劃算法、路徑交換算法和貪婪算法等[4]。最短路徑算法通過計算節點之間的距離或時間來確定最短路徑,適用于無須考慮動態因素的場景。蟻群算法模擬螞蟻的行為,通過信息素傳播來找到最優路徑。遺傳算法通過基因編碼和演化過程來搜索最優路徑,適用于復雜場景。禁忌搜索算法利用記憶搜索歷史決策,避免陷入局部最優解。動態規劃算法適用于無環有向圖的最短路徑問題。路徑交換算法通過節點交換來優化路徑效率。貪婪算法每次選擇最優路徑,逐步構建整體路徑。選擇合適的算法取決于實際需求和場景,可以根據距離、時間、成本等因素進行優化,以提高物流效率和降低成本。綜合考慮算法計算量和時效性,本項目選擇A*算法作為路徑優化算法。
A*算法是一種常用的啟發式搜索算法,用于求解圖形中最短路徑或最佳路徑問題。它結合了貪婪搜索和Dijkstra算法的思想,在搜索過程中綜合考慮了實際代價和啟發式函數的估計代價[5]。A算法的核心是根據節點的估計代價選擇下一個要擴展的節點。每個節點都有實際代價(G值)和啟發式函數的估計代價(H值),A算法選擇的節點是實際代價和啟發式估計代價之和最小的節點。
本項目中涉及路網較為復雜,為簡化地圖模型,提高路徑規劃效率,僅在路網分叉處和拐彎處設定柵格節點。實踐表明,該方法能顯著減少系統路徑規劃時間。
4 結語
本文主要探討了廣西交通職業技術學院的智能網聯示范運營中心建設方案,實現特殊區域路側智能交通設備設施網聯化建設,推動道路智能化網聯化建設工作。本項目包含車路協同信息服務平臺、車聯網接入平臺和無人駕駛配送及售貨車三個部分。車路協同信息服務平臺與車聯網智能終端進行協同配合,提供事件感知、態勢評估、交通優化、車輛管理、數據交互等基礎數據和應用服務。車聯網接入平臺負責對接不同廠家設備的統一接入和管理,實現多協議適配。無人駕駛配送及售貨車集激光雷達、攝像頭等傳感器于一體,實現無人駕駛配送,提升物流運力與效率,降低成本,優化物流成本結構。
參考文獻:
[1]房 亮,鄭春芳,王 濤.基于智能微縮車的車路協同實訓平臺設計[J].河北能源職業技術學院學報,2022,22(02):66-69.
[2]李 巖,唐睢睢.面向高速公路運管的車路協同云控平臺架構設計[J].汽車實用技術,2022,47(17):56-61.
[3]張云順,華國棟,李 寧,等.基于車路協同的智能駕駛研究綜述[J].汽車文摘,2022(6):49-57.
[4]朱 宇.無人駕駛車輛路徑規劃算法綜述[J].內燃機與配件,2023(24):81-84.
[5]陳圣群,董林飛.DIJKSTRA和A-STAR算法在智能導航中的應用分析[J].重慶科技學院學報(自然科學版),2010,12(6):159-161.20240320