新型道路交通檢測技術與融合應用
2024-12-31 00:00:00袁曉君劉銘豪
中國標準化 2024年19期
摘 要:隨著智慧交通行業的不斷發展,感知技術的不斷升級,傳統檢測技術無法滿足復雜場景下交通信息的采集需求,本文提出了一種基于雷達和視頻的融合感知技術,實現交通流信息的全天候、高精度、多維度實時監測和分析。分別論述了融合感知技術在全息路口、高速公路和隧道以及車路協同領域應用的特點優勢,并對一體化檢測器的技術發展和質量管理提出要求。
關鍵詞:智慧交通,融合感知,一體化檢測器
DOI編碼:10.3969/j.issn.1002-5944.2024.19.041
0 引 言
智慧交通以物聯網、云計算、大數據為基礎,通過路面設備融合感知交通流信息,計算分析道路實時通行狀況,從而優化交通流時空分布,提高交通出行效率。準確、全面、可靠的交通流信息是智慧交通系統發揮作用的基礎,基于融合感知技術的一體化檢測器通過雷達與視頻檢測技術的深度融合,對采集的信息進行底層數據融合、目標識別和決策判斷,統計流量數據,識別交通事件,多維度提取車輛特征和運動軌跡信息,形成結構化數據,為全息路口、車路協同、道路預警等應用提供技術支撐,營造安全、有序、暢通的道路交通環境。
1 傳統檢測技術
隨著智慧交通行業的不斷發展,感知技術的不斷升級,對道路交通感知的要求越來越高,單一的傳統檢測技術受環境影響和應用場景限制,無法實現全方位、多維度、全天候監控,無法滿足復雜場景下交通流信息的采集。
地磁檢測技術是基于電磁感應原理,車輛通過檢測器上方時,檢測器根據磁場的變化,記錄車輛的通行時間和方向。地磁檢測器安裝在路面之下,不易受到環境、天氣的影響,但是安裝維護時阻礙交通,施工量大,當發生擁堵時,易受到相鄰車輛的干擾,影響檢測精度。
視頻檢測技術是一種基于內容的視覺媒體技術,它主要對圖像的顏色、紋理、布局等進行分析和檢索,實現對車輛及事件的識別。視頻攝像頭安裝簡單,畫面直觀可靠,是實時呈現交通流狀況的核心設備,但是視頻檢測技術一定程度上受到檢測距離、光照度等因素的影響,造成監控范圍小、畫面過度曝光。
雷達檢測技術是通過電磁波檢測到物體時引起回波信號的時間或頻率的變化實現車輛的檢測。雷達檢測器檢測距離長、受光照度影響較小,抗干擾能力強,能全天候不間斷工作,但在擁堵、非機動車及行人混合的交通場景下,由于目標靜止、速度慢、散射面積小,造成例如高速停車和行人闖入的漏報、路口排隊長度預測失真等問題。
2 新型檢測技術
實時交通流信息是智慧交通最基本、核心的信息源,只有性能更優、功能更可靠、滿足全天候工作的檢測技術才能實現對實時交通流信息的準確采集、融合和分析,包括車流量、速度、擁堵、車頭間距、占有率、排隊長度、實時位置、交通事件、非機動車、行人等。融合感知技術結合雷達與視頻檢測技術的優點[1],形成技術互補,以廣域雷達檢測技術[2],視頻AI檢測技術為基礎,實現交通流信息統計和交通事件識別。在數據采集過程中,配合目標跟蹤和高精度定位信息,對雷達數據、視頻數據進行實時交互,實現數據的融合匹配。
2.1 廣域雷達檢測技術
微波雷達檢測技術從早期的只提供速度信息,到后來能夠提供速度與距離信息,再到近幾年主流的3D毫米波雷達,在提供速度+距離+角度信息的基礎上能夠形成平面定位,實現多目標跟蹤,探測距離能達到350米以上。
廣域雷達檢測技術采用多通道天線一發多收的設計,使雷達天線發射的波形可以覆蓋更大的區域,對檢測區域內的車輛、非機動車、行人等目標的運動軌跡逐幀采集,獲得目標的初始軌跡數據。利用大區域跟蹤檢測原理,解決大車遮擋小車的情況;以雷達安裝位置為坐標原點,建立參考坐標系,對初始軌跡跟蹤數據進行坐標數據標定,得到目標軌跡跟蹤數據;對檢測區域內的目標車輛進行實時相對位置的區分識別,得到相對位置信息;將檢測車輛的通行信息進行數據解析與位置標定,并應用3D雷達技術(相對距離、速度、方位角)區分、識別、確定目標車輛,給每一個目標車輛標定編號,實現對多目標檢測區分;結合車輛軌跡跟蹤檢測技術和神經網絡技術,呈現點云圖像信息,對靜止物體進行檢測、識別、區分,進行車輛行為分析,判斷交通事件。
2.2 視頻AI檢測技術
視頻攝像頭作為目前最廣泛的交通監控設備,能對道路狀況進行實況呈現是其核心優勢,并能通過視頻識別技術對車輛號牌、車輛類型、車身顏色等特征進行識別。隨著機器視覺、深度學習等技術的逐步成熟,視頻AI檢測技術得到廣泛應用,通過提取視頻中的關鍵信息,進行檢測、跟蹤、識別、標定等處理,形成相應數據統計和事件處理。
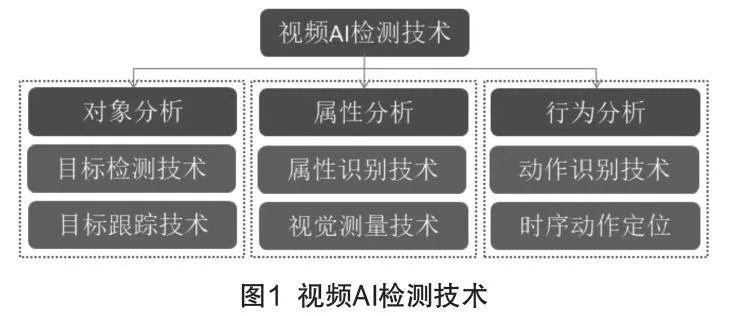
視頻AI檢測技術主要包含對象分析、屬性分析和行為分析,通過目標檢測技術、目標跟蹤技術[3]、屬性識別技術、動作識別技術等實現,如圖1所示。對象分析是對目標進行結構化識別,包括車、人、物的分類、位置的檢測和跟蹤;屬性分析是對目標的顏色、大小、類型等信息的識別和標記;行為分析是對目標的軌跡、動作、定位等狀態的識別和分析。
目標檢測技術對視頻中感興趣區域進行選取,識別目標類型并定位目標在圖像中的位置;屬性識別技術進行目標的特征信息識別、標記,從而進行特征提取、融合、分類;目標跟蹤技術進行目標身份時序關聯、目標數據匹配,利用連續幀之間的相關性,對目標在時間上進行連續追蹤。隨著時間的推移,相同的目標在時間與空間上被關聯到一起,每個目標形成一條軌跡,并給每個目標分配一個標定編號;動作識別技術是在目標識別、目標跟蹤之后,進一步分析目標的出現時間、運動軌跡、特征信息等,通過對各個目標的綜合狀態信息的分析,識別監控區域中存在的風險、違規行為或者可疑目標。
2.3 融合感知技術
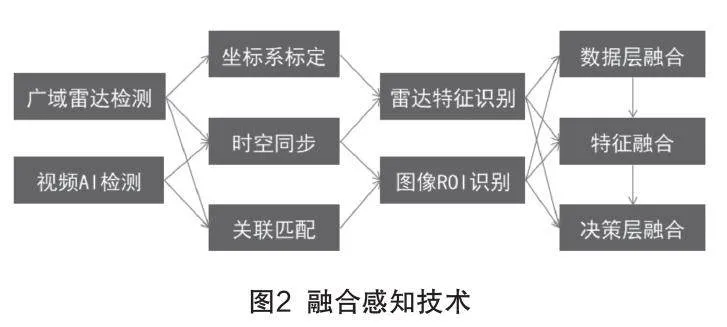
融合感知技術以廣域雷達檢測技術和視頻AI檢測技術為基礎,分別進行數據的檢測、識別和分析。通過內部網絡實時交互、關聯、標定、匹配,實現融合感知,最終的融合層根據不同的應用可以分為數據融合、特征融合和決策融合[4],如圖2所示。
通過廣域雷達檢測技術和視頻AI檢測技術分別采集范圍內所有車輛目標的運動軌跡數據,進行坐標系標定,對兩種軌跡數據進行預處理,提高數據質量,通過時空同步,實現兩種軌跡數據的坐標統一。在此基礎上,根據兩種軌跡數據的車輛運動狀態序列的關聯關系進行一致性目標關聯匹配,進而提取目標的特征信息、狀態信息,最后將交通流信息進行數據層融合、特征融合、決策層融合,形成道路交通狀況的全息感知,形成交通流信息的結構化數據,實現交通管理的數字化。
3 融合感知技術在智慧交通中的應用
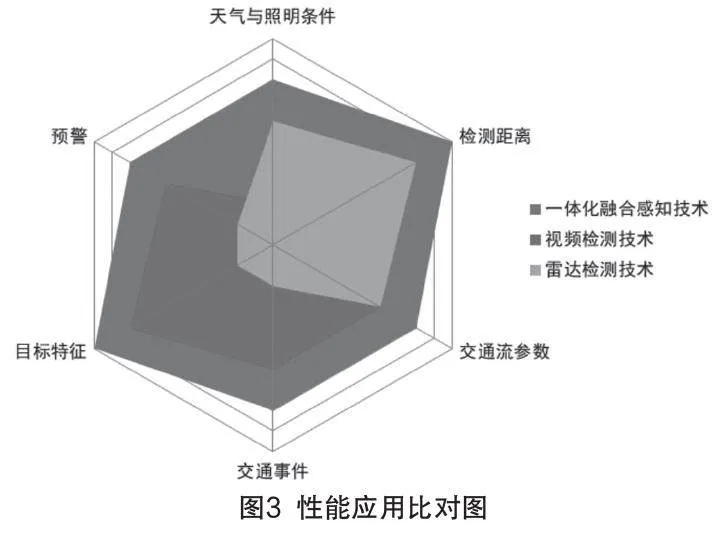
融合感知技術在使用環境、檢測范圍、功能和性能指標方面較視頻檢測技術、雷達檢測技術有顯著提升,如圖3所示。一體化融合感知技術在處理復雜交通場景時更具優勢:(1)檢測距離長、數據精度高。檢測縱向距離可達250米以上,橫向檢測視角可達90°以上,能覆蓋雙向6~8車道。車流量、平均速度檢測精度能到達98%以上。(2)檢測功能及特征識別豐富。實現車輛類型、軌跡、位置等車輛信息的識別,擁堵事件、異常停車事件、逆行事件、行人事件等交通事件的預警。(3)全天候運行。采用低照度攝像頭,具備強光抑制、寬動態等功能,配合微波雷達可實現全天候精準檢測。
3.1 全息路口應用
全息路口是基于數字孿生技術,通過構建“感知+智慧”能力,將道路信息、車輛信息、行人和非機動車等要素進行數字化還原,為路口的智能化、精細化管理提供解決方案。通過一體化融合感知技術采集道路車流量、平均速度、占有率、排隊長度、車輛號牌、車輛類型數據,采用高性能數據處理單元對數據進行篩選、分類、分析,形成數字化信息。同時,一體化融合感知技術配合實時視頻技術和高精度定位技術,可實時呈現真實路況下的車道級軌跡定位信息,從而實現路口的智能化、精細化管理。
3.2 高速公路和隧道應用
高速公路和隧道的交通管理與預警一直是交管部門的痛點,高速公路場景大、距離長,車輛行駛速度快,檢測覆蓋率低,隧道空間狹小,能見度低,檢測識別率低,不易發現交通安全隱患,甚至容易引發二次事故。一體化融合感知技術憑借雷達檢測距離長、攝像頭低照度功能,能夠全天候不間斷工作,提供實時視頻監控畫面,對道路擁堵、異常停車、車輛逆行、占用應急車道、貨車占用主車道、非機車行人闖入等異常交通事件進行及時上報,預警預防二次事故。
3.3 車路協同應用
車路協同是通過全時空動態交通信息的采集與融合,開展車輛主動安全控制和道路協同管理。一體化融合感知技術實現交通流信息、車輛狀態特征信息、交通事件信息、行人非機動車信息的精確采集,配合高精度地圖技術生成軌跡坐標數據,并進行實時數據分析、交互、融合,給每一個目標生成一個標定編號,最終實現全局目標的結構化和實時矢量化數據,為邊緣計算層的控制、交互和決策提供精準數據支撐,促進車路協同場景的落地。
4 建議措施
新型融合檢測技術為交通信息采集提供了準確、可靠的技術支撐,下一步可從標準化設計、合理化使用、規范運維等方面加強新型道路一體化檢測器的全生命周期質量管理,為道路交通安全管理和通行效率提供更有力的保障。
4.1 標準化產品技術
在產品技術標準化方面,GB/T 20609—2023《交通信息采集 微波交通流檢測器》和G B / T24726—2021《交通信息采集 視頻交通流檢測器》國家標準已分別規范了微波交通流檢測器和視頻交通流檢測器的功能要求和性能指標,2024年,中國道路交通安全協會發布了團體標準T/CTS 21—2024《道路交通微波與視頻一體化檢測器》,對采用新型檢測技術的一體化檢測器在檢測精度、數據融合等方面提出了系統技術要求。嚴格執行標準,對保證產品質量,提升產品性能具有重要意義。
4.2 合理選擇應用
新型檢測技術的融合應用應遵循因地制宜的原則,根據不同應用場景綜合考慮性能精度、集成性以及成本效益多個方面,合理選擇適宜的檢測技術和功能特點。例如,城市道路車流量大、安裝空間有限,宜選擇精度高、體積小、集成識別功能的檢測器;高速公路及隧道距離長、安全風險高,選擇檢測覆蓋面大、具備事件預警功能的檢測器更為合理。
4.3 強化運維管理
實時有效的運維管理是道路交通檢測設備發揮作用的關鍵所在。通過應用實時監控系統、配置管理系統等技術建設運維管理平臺,對設備的運行狀態、性能指標進行實時監測,準確設置各類檢測設備的參數配置,及時排除設備異常工作狀態,確保設備的穩定性、安全性和高效性。
5 結 語
本文介紹了一種基于雷達和視頻的融合感知技術,較傳統道路交通信息感知技術在使用環境、檢測范圍、功能和性能有明顯提升,一方面解決復雜場景下交通事件的準確預警,另一方面通過采集、識別、融合,生成交通流信息的實時結構化數據,為交通管理的智慧大腦提供數據支撐,實現交通態勢感知、集成指揮調度,推進交通管理安全與出行效率的信息化縱深、協同發展。
參考文獻
[1]孟維偉,郭麗蘋,張興宇.雷達與視頻融合的交通信息感知技術研究[J].橋與防洪,2022(10):242-244.
[2]鄭明潔,閆賀,張冰塵,等.基于DB S圖像的雙通道廣域監視雷達動目標檢測和參數估計方法[ J ] .雷達學報.2012,1(1):36-42.
[3]蔣賢皓.基于視頻流的多目標檢測與跟蹤技術研究[D].成都:電子科技大學,2023.
[4]陳宏,付立家,尚康,等.基于雷視融合感知技術的公路隧道交通管控系統研究[J].公路交通技術,2023,39(6):153-159.
作者簡介
袁曉君,本科,工程師,研究方向為交通技術監控檢測與標準化。
劉銘豪,本科,助理工程師,研究方向為交通安全產品檢測。
(責任編輯:袁文靜)
基金項目:本文受中央級公益性科研院所基本科研業務費專項資金項目“機動車安全技術查驗檢驗智能審核系統測試評價技術研究”(項目編號:2024081107)資助。