基于擴(kuò)散體的無透鏡成像系統(tǒng)及其分辨率分析
2025-01-19 00:00:00劉明昊
物聯(lián)網(wǎng)技術(shù) 2025年2期
關(guān)鍵詞:物聯(lián)網(wǎng)
摘 要:無鏡頭成像是一種以計(jì)算取代鏡頭的新興成像技術(shù),有望在低成本便攜式物聯(lián)網(wǎng)視覺終端系統(tǒng)中獲得廣泛應(yīng)用。針對(duì)擴(kuò)散體無鏡頭系統(tǒng)成像性能評(píng)估工作不足的問題,搭建了基于擴(kuò)散體的無鏡頭成像系統(tǒng),探究了該系統(tǒng)成像模型,使用直接測(cè)量法測(cè)量了不同條件下該系統(tǒng)的點(diǎn)擴(kuò)散函數(shù),分析其自相關(guān)函數(shù)的半高全寬和空間頻率響應(yīng),評(píng)估該系統(tǒng)的成像性能和分辨率。實(shí)驗(yàn)結(jié)果表明,該系統(tǒng)SFR測(cè)量值約為0.030 cycles/pixel,重構(gòu)圖像的峰值信噪比(PSNR)超過12 dB,成像性能良好。
關(guān)鍵詞:物聯(lián)網(wǎng);無鏡頭成像;點(diǎn)擴(kuò)散函數(shù);直接測(cè)量法;擴(kuò)散體;分辨率
中圖分類號(hào):TP391 文獻(xiàn)標(biāo)識(shí)碼:A 文章編號(hào):2095-1302(2025)02-00-03
0 引 言
在過去的幾個(gè)世紀(jì),透鏡的出現(xiàn)大大推動(dòng)了成像技術(shù)的發(fā)展,然而,可穿戴設(shè)備、植入式設(shè)備、機(jī)器人、物聯(lián)網(wǎng)、虛擬/增強(qiáng)現(xiàn)實(shí)和人機(jī)交互正在推動(dòng)相機(jī)向著小型化發(fā)展,但透鏡的使用增加了這些設(shè)備的重量和成本。
無鏡頭成像設(shè)備中不配置透鏡,而是在場(chǎng)景和圖像傳感器之間放置光學(xué)調(diào)制器,場(chǎng)景光經(jīng)過光學(xué)調(diào)制器調(diào)制后,圖像傳感器采集圖像數(shù)據(jù),然后使用特定的算法進(jìn)行圖像重建[1]。
擴(kuò)散體無鏡頭成像系統(tǒng)的性能可以通過在單點(diǎn)光源照射時(shí)的響應(yīng)來表征[2]。這種響應(yīng)稱為點(diǎn)擴(kuò)散函數(shù)(Point Spread Function, PSF)。系統(tǒng)PSF可以被用來評(píng)估成像系統(tǒng)的圖像質(zhì)量,通過分析PSF的特征,可以了解成像系統(tǒng)的分辨率、模糊度、畸變程度等性能指標(biāo)。
在實(shí)際系統(tǒng)成像過程中,由于光學(xué)衍射效應(yīng)、外界噪聲等因素的干擾,理論計(jì)算得到的點(diǎn)擴(kuò)散函數(shù)與實(shí)際系統(tǒng)的輸出響應(yīng)不符。因此,通常需要根據(jù)實(shí)際系統(tǒng)中的輸出響應(yīng)對(duì)成像模型中的點(diǎn)擴(kuò)散函數(shù)進(jìn)行調(diào)整,以獲得較好的成像結(jié)果,從實(shí)際系統(tǒng)中獲得輸出響應(yīng)的過程,也稱為點(diǎn)擴(kuò)散函數(shù)的測(cè)量。現(xiàn)如今測(cè)量PSF的方法大致可以分為3類:使用自然場(chǎng)景圖像的盲PSF估計(jì)[3-5]、使用校準(zhǔn)模式的非盲PSF估計(jì)[6-8]和使用點(diǎn)狀源直接測(cè)量PSF[9-12]。文獻(xiàn)[5]假設(shè)檢測(cè)到的模糊邊緣是模糊之前的階躍邊緣,并且使用一對(duì)預(yù)測(cè)圖像和模糊圖像來估計(jì)PSF。文獻(xiàn)[3]提出了另一種基于邊緣的方法,該方法使用潛在清晰圖像邊緣的先驗(yàn)補(bǔ)丁來估計(jì)PSF。非盲PSF估計(jì)方法使用校準(zhǔn)圖案作為輸入圖像來估計(jì)PSF[6-8]。文獻(xiàn)[5]使用具有最大后驗(yàn)技術(shù)的貝葉斯框架來估計(jì)PSF。文獻(xiàn)[7]設(shè)計(jì)了一種每個(gè)塊中都有源泉的棋盤測(cè)試圖,然后通過解決最小二乘問題來估計(jì)PSF。文獻(xiàn)[8]使用隨機(jī)噪聲目標(biāo)來估計(jì)PSF。非盲PSF估計(jì)技術(shù)通常假設(shè)空間不變PSF,因此不適合空間可變PSF圖像系統(tǒng)。PSF直接測(cè)量方法通常使用點(diǎn)狀源和特定光學(xué)儀器來獲取PSF[9-12],這種方法可以克服測(cè)量空間變化PSF的弱點(diǎn)。文獻(xiàn)[12]使用液晶顯示器(LCD)生成點(diǎn)陣圖案來測(cè)量不同相機(jī)區(qū)域的PSF。文獻(xiàn)[9]提出了一種采用準(zhǔn)直氦氖激光器作為放置在無窮遠(yuǎn)處的點(diǎn)光源進(jìn)行高信噪比PSF測(cè)量的方法。文獻(xiàn)[11]使用虛擬點(diǎn)狀源實(shí)現(xiàn)了子像素PSF的測(cè)量。直接測(cè)量法更為方便快速,同時(shí)更能反映成像模型與實(shí)際系統(tǒng)之間的誤差。
本文設(shè)計(jì)了一種基于FPGA硬件平臺(tái)的擴(kuò)散體無鏡頭相機(jī),并且對(duì)該系統(tǒng)的PSF進(jìn)行了測(cè)試評(píng)估,進(jìn)而分析了該系統(tǒng)的成像性能和分辨率。
1 擴(kuò)散體無鏡頭成像系統(tǒng)架構(gòu)
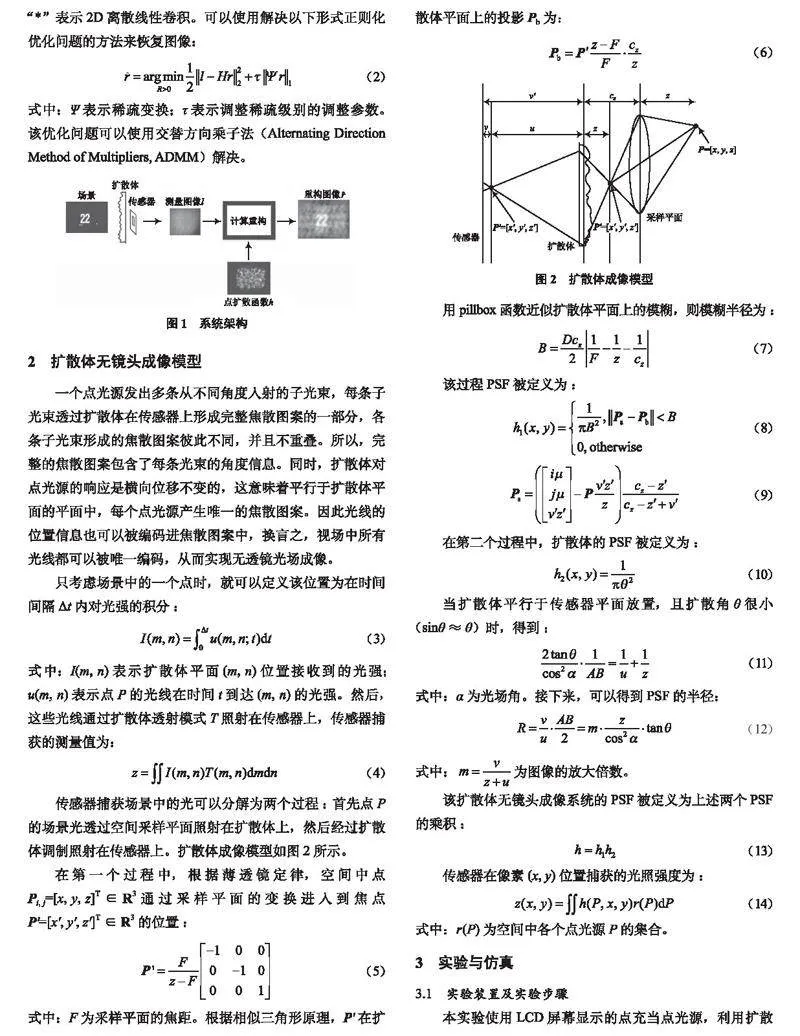
擴(kuò)散體的無鏡頭成像系統(tǒng)由一個(gè)光學(xué)傳感器、一個(gè)擴(kuò)散體和計(jì)算單元組成[13]。本文使用的擴(kuò)散體是一個(gè)較薄的透明相位板,視場(chǎng)中非相干點(diǎn)光源透過該擴(kuò)散體在傳感器上生成偽隨機(jī)焦散圖案h作為PSF,將焦散圖案存儲(chǔ)到FPGA內(nèi)存中后,使用傳感器采集場(chǎng)景圖像獲得測(cè)量數(shù)據(jù)l,利用焦散圖案和場(chǎng)景圖像數(shù)據(jù)在FPGA中完成圖像重構(gòu)。系統(tǒng)架構(gòu)如圖1所示。
本文將場(chǎng)景建模為具有不同顏色和強(qiáng)度的點(diǎn)光源的集合。假設(shè)所有場(chǎng)景中所有點(diǎn)彼此獨(dú)立,傳感器測(cè)量值l可以描述為:
(1)
式中:h表示系統(tǒng)PSF;r表示場(chǎng)景;(m, n)表示傳感器坐標(biāo);“*”表示2D離散線性卷積。可以使用解決以下形式正則化優(yōu)化問題的方法來恢復(fù)圖像:
(2)
式中:Ψ表示稀疏變換;τ表示調(diào)整稀疏級(jí)別的調(diào)整參數(shù)。該優(yōu)化問題可以使用交替方向乘子法(Alternating Direction Method of Multipliers, ADMM)解決。
2 擴(kuò)散體無鏡頭成像模型
一個(gè)點(diǎn)光源發(fā)出多條從不同角度入射的子光束,每條子光束透過擴(kuò)散體在傳感器上形成完整焦散圖案的一部分,各條子光束形成的焦散圖案彼此不同,并且不重疊。所以,完整的焦散圖案包含了每條光束的角度信息。同時(shí),擴(kuò)散體對(duì)點(diǎn)光源的響應(yīng)是橫向位移不變的,這意味著平行于擴(kuò)散體平面的平面中,每個(gè)點(diǎn)光源產(chǎn)生唯一的焦散圖案。因此光線的位置信息也可以被編碼進(jìn)焦散圖案中,換言之,視場(chǎng)中所有光線都可以被唯一編碼,從而實(shí)現(xiàn)無透鏡光場(chǎng)成像。
只考慮場(chǎng)景中的一個(gè)點(diǎn)時(shí),就可以定義該位置為在時(shí)間間隔Δt內(nèi)對(duì)光強(qiáng)的積分:
(3)
式中:I(m, n)表示擴(kuò)散體平面(m, n)位置接收到的光強(qiáng);u(m, n)表示點(diǎn)P的光線在時(shí)間t到達(dá)(m, n)的光強(qiáng)。然后,這些光線通過擴(kuò)散體透射模式T照射在傳感器上,傳感器捕獲的測(cè)量值為:
(4)
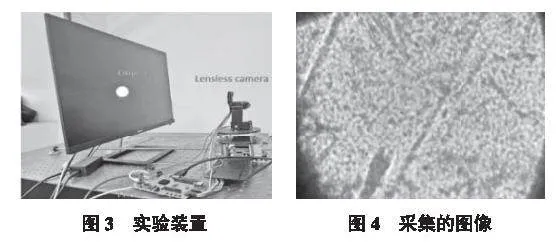
傳感器捕獲場(chǎng)景中的光可以分解為兩個(gè)過程:首先點(diǎn)P的場(chǎng)景光透過空間采樣平面照射在擴(kuò)散體上,然后經(jīng)過擴(kuò)散體調(diào)制照射在傳感器上。擴(kuò)散體成像模型如圖2所示。
在第一個(gè)過程中,根據(jù)薄透鏡定律,空間中點(diǎn)
Pi, j=[x, y, z]T∈R3通過采樣平面的變換進(jìn)入到焦點(diǎn)
P'=[x', y', z']T∈R3的位置:
(5)
式中:F為采樣平面的焦距。根據(jù)相似三角形原理,P'在擴(kuò)散體平面上的投影Pb為:
(6)
用pillbox函數(shù)近似擴(kuò)散體平面上的模糊,則模糊半徑為:
(7)
該過程PSF被定義為:
(8)
(9)
在第二個(gè)過程中,擴(kuò)散體的PSF被定義為:
(10)
當(dāng)擴(kuò)散體平行于傳感器平面放置,且擴(kuò)散角θ很小(sinθ≈θ)時(shí),得到:
(11)
式中:α為光場(chǎng)角。接下來,可以得到PSF的半徑:
(12)
式中:為圖像的放大倍數(shù)。
該擴(kuò)散體無鏡頭成像系統(tǒng)的PSF被定義為上述兩個(gè)PSF的乘積:
(13)
傳感器在像素(x, y)位置捕獲的光照強(qiáng)度為:
(14)
式中:r(P)為空間中各個(gè)點(diǎn)光源P的集合。
3 實(shí)驗(yàn)與仿真
3.1 實(shí)驗(yàn)裝置及實(shí)驗(yàn)步驟
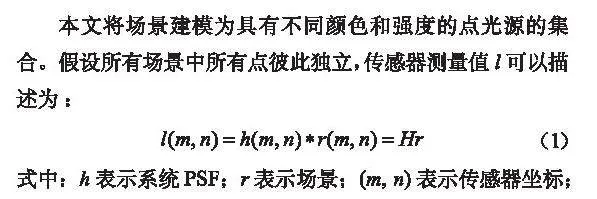
本實(shí)驗(yàn)使用LCD屏幕顯示的點(diǎn)充當(dāng)點(diǎn)光源,利用擴(kuò)散體、黑色孔徑板和除掉鏡頭的OV5640圖像傳感器獲取點(diǎn)光源的焦散圖案。其中孔徑板為外寬2 cm、內(nèi)寬0.2 cm的黑色正方形紙板,圖像傳感器的有效像素個(gè)數(shù)為2 592×1 944,像素尺寸為1.4×1.4,傳感器尺寸為4 mm。實(shí)驗(yàn)裝置如圖3所示。
本實(shí)驗(yàn)旨在探尋該系統(tǒng)成像性能以及點(diǎn)光源與傳感器距離對(duì)PSF的影響,具體實(shí)驗(yàn)步驟如下:
(1)將LCD屏幕同軸放置在傳感器前,使屏幕與傳感器的距離D=10 cm,在屏幕上顯示S=100 pixel的點(diǎn)光源;
(2)捕獲傳感器上顯示的焦散圖案,保存在計(jì)算機(jī)上;
(3)捕獲場(chǎng)景圖像經(jīng)過擴(kuò)散體采集的原始數(shù)據(jù);
(4)使用ADMM算法重構(gòu)點(diǎn)光源圖像;
(5)使用MATLAB計(jì)算點(diǎn)光源和重構(gòu)點(diǎn)光源的自相關(guān)系數(shù)和重構(gòu)圖像的SFR;
(6)改變LCD屏幕與傳感器距離,重復(fù)上述步驟。
3.2 實(shí)驗(yàn)結(jié)果及分析
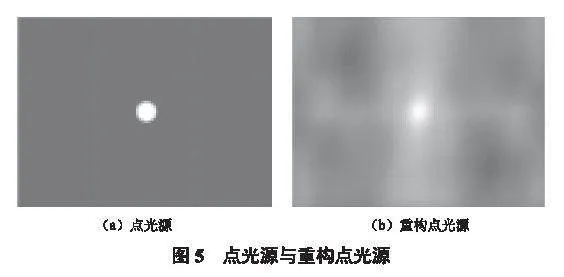
首先測(cè)試系統(tǒng)重構(gòu)點(diǎn)光源的能力。使用的點(diǎn)光源大小為100 pixel,距離為5 cm時(shí),采集的圖像如圖4所示。其可以作為無鏡頭系統(tǒng)中的點(diǎn)擴(kuò)散函數(shù)h,也可以作為傳感器測(cè)量值l。
利用采集到的PSF作為測(cè)量值l,使用ADMM算法重構(gòu)點(diǎn)光源圖像,點(diǎn)光源與重構(gòu)點(diǎn)光源如圖5所示。
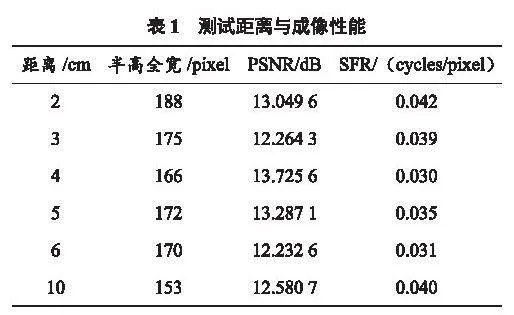
計(jì)算距離為5 cm時(shí),重構(gòu)點(diǎn)光源與原圖像的PSNR為13.287 1。利用原點(diǎn)光源圖像和重構(gòu)點(diǎn)光源圖像自相關(guān)函數(shù)計(jì)算可知,其半高全寬為172 pixel,重構(gòu)點(diǎn)光源的SFR測(cè)量值為0.035 cycles/pixel。
對(duì)距離為2 cm、3 cm、4 cm、5 cm、6 cm、10 cm的點(diǎn)光源按上述步驟進(jìn)行測(cè)量,測(cè)試距離與成像性能見表1。
實(shí)驗(yàn)結(jié)果表明,該系統(tǒng)在近距離條件下有著較為良好的成像性能,系統(tǒng)半高全寬約為170 pixel,SFR約為0.030 cycles/pixel,成像PSNR超過12 dB。
4 結(jié) 語
本文探究了基于擴(kuò)散體的無鏡頭成像系統(tǒng)的成像模型,搭建了成像系統(tǒng)平臺(tái),測(cè)試了不同條件下系統(tǒng)點(diǎn)擴(kuò)散函數(shù)的成像性能,評(píng)估了擴(kuò)散體無鏡頭成像系統(tǒng)的分辨率大小。實(shí)驗(yàn)結(jié)果表明,該系統(tǒng)點(diǎn)擴(kuò)散函數(shù)采集距離為4 cm時(shí)成像性能最佳,PSNR接近14 dB,系統(tǒng)SFR測(cè)量值在0.030 cycles/pixel左右,有著良好的成像效果。但是該系統(tǒng)成像性能還有很大提升空間,可以在本文基礎(chǔ)上加入圖像信號(hào)處理系統(tǒng),對(duì)采集的PSF信號(hào)做優(yōu)化處理,再進(jìn)行圖像重構(gòu),以達(dá)到更好的成像效果。
參考文獻(xiàn)
[1] BOOMINATHAN V, ROBINSON J T, WALLER L, et al. Recent advances in lensless imaging [J]. Optica, 2022, 9(1): 1-16.
[2] JIANG H Z, LIU Y C, LI X D, et al. Point spread function measurement based on single-pixel imaging [J]. IEEE photonics journal, 2018, 10(6): 1-15.
[3] SUN L B, CHO S H, WANG J, et al. Edge-based blur kernel estimation using patch priors [C]// IEEE International Conference on Computational Photography. Cambridge, MA, USA: IEEE, 2013: 1-8.
[4] CHO T S, PARIS S, HORN B K, et al. Blur kernel estimation using the radon transform [C]// IEEE Conference on Computer Vision and Pattern Recognition. Colorado Springs, CO, USA: IEEE, 2011: 241-248.
[5] JOSHI N, SZELISKI R, KRIEGMAN D J. PSF estimation using sharp edge prediction [C]// IEEE Conference on Computer Vision and Pattern Recognition. Anchorage, AK, USA: IEEE, 2008: 1-8.
[6] MOSLEH A, GREEN P, ONZON E, et al. Camera intrinsic blur kernel estimation: a reliable framework [C]// IEEE Conference on Computer Vision and Pattern Recognition. Boston, MA, USA: IEEE, 2015: 4961-4968.
[7] KEE E, PARIS S, CHEN S, et al. Modeling and removing spatially-varying optical blur [C]// IEEE International Conference on Computational Photography. Pittsburgh, PA: IEEE, 2011: 1-8.
[8] BRAUERS J, SEILER C, AACH T. Direct PSF estimation using a random noise target [J]. Proceedings of SPIE, 2010, 7537(75370B).
[9] DU H, VOSS K J. Effects of point-spread function on calibration and radiometric accuracy of CCD camera [J]. Applied optics, 2004, 43(3): 665-670.
[10] LEHR J, SIBARITA J B, CHASSERY J M. Image restoration in X-ray microscopy: PSF determination and biological applications [J]. IEEE transactions on image processing, 1998, 7(2): 258-263.
[11] JEMEC J, PERNU S F, LIKAR B, et al. 2D sub-pixel point spread function measurement using a virtual point-like source [J]. International journal of computer vision, 2017, 121(3): 391-402.
[12] NAVAS-MOYA F A, NIEVES J L, VALERO E M, et al. Measurement of the optical transfer function using a white-dot pattern presented on a liquid-crystal display [J]. Journal of the European optical society rapid publications, 2013, 8(13029).
[13] CAI Z W, CHEN J W, GIANCARLO P, et al. Lensless light-field imaging through diffuser encoding [J]. Light: science amp; applications, 2020, 9(5): 1392-1400.
作者簡(jiǎn)介:劉明昊(1998—),男,廣東深圳人,碩士,研究方向?yàn)橛?jì)算成像。
收稿日期:2024-01-18 修回日期:2024-03-06
猜你喜歡
軟件導(dǎo)刊(2016年9期)2016-11-07 21:56:29
軟件導(dǎo)刊(2016年9期)2016-11-07 21:32:45
中國科技博覽(2016年22期)2016-11-01 15:02:01
中國科技博覽(2016年22期)2016-11-01 13:21:09
中國科技博覽(2016年19期)2016-10-19 14:58:22
電腦知識(shí)與技術(shù)(2016年21期)2016-10-18 22:33:02
科技視界(2016年22期)2016-10-18 17:23:30
中國新通信(2016年16期)2016-10-18 11:01:39
中國新通信(2016年16期)2016-10-18 11:00:54
科學(xué)與財(cái)富(2016年28期)2016-10-14 01:24:06

- 物聯(lián)網(wǎng)技術(shù)的其它文章
- OBE與任務(wù)驅(qū)動(dòng)融合在導(dǎo)論課程的研究與實(shí)踐
- 基于產(chǎn)教融合的物聯(lián)網(wǎng)工程專業(yè)建設(shè)研究與探索
- 物聯(lián)網(wǎng)技術(shù)在航空制造供應(yīng)鏈協(xié)同管理中的應(yīng)用探索
- 基于視覺感知的智能導(dǎo)盲杖系統(tǒng)應(yīng)用研究
- 基于ESP32的智能家居安防系統(tǒng)
- 基于物聯(lián)網(wǎng)技術(shù)的隧道風(fēng)機(jī)環(huán)境自適應(yīng)節(jié)能控制方法