利用紅外對(duì)射器判斷復(fù)雜場(chǎng)景下大型物體出入庫方向
2025-01-19 00:00:00李楊秦立德史甜姝蔣遂平
物聯(lián)網(wǎng)技術(shù) 2025年2期
關(guān)鍵詞:物聯(lián)網(wǎng)

利用紅外對(duì)射器判斷復(fù)雜場(chǎng)景下大型物體出入庫方向
李 楊1,秦立德1,史甜姝2,蔣遂平1
(1.北京計(jì)算機(jī)技術(shù)及應(yīng)用研究所,北京 100854;2.天津市勞動(dòng)經(jīng)濟(jì)學(xué)校,天津 300380)
摘 要:針對(duì)倉庫出入庫作業(yè)中需要準(zhǔn)確記錄大型物體出庫或入庫方向的需求,設(shè)計(jì)了一種利用多個(gè)紅外對(duì)射器判斷復(fù)雜場(chǎng)景下物體出入庫方向的方法。該方法根據(jù)獲取的紅外對(duì)射器狀態(tài)序列,計(jì)算其中的有效狀態(tài)子序列并與理想狀態(tài)序列比較,完成物體出入庫方向的判斷。實(shí)際應(yīng)用表明,該方法能夠簡(jiǎn)單有效地判斷物體出入庫的方向,特別適合于計(jì)算能力較弱的物聯(lián)網(wǎng)終端實(shí)現(xiàn)邊緣計(jì)算,能夠滿足倉庫管理應(yīng)用中的需求。
關(guān)鍵詞:紅外對(duì)射器;倉庫管理;方向判斷;物聯(lián)網(wǎng);邊緣計(jì)算;有效狀態(tài)序列
中圖分類號(hào):TP39 文獻(xiàn)標(biāo)識(shí)碼:A 文章編號(hào):2095-1302(2025)02-00-03
0 引 言
在一類倉庫的出入庫作業(yè)中,通常需要準(zhǔn)確記錄大型物體出庫或入庫的方向。大型物體出入庫大多采用人工推行的方式,可以通過檢測(cè)物體和人員運(yùn)動(dòng)方向來確定物體的運(yùn)動(dòng)方向。常見的方法是在庫房大門安裝攝像頭、超聲波發(fā)射器和雷達(dá),利用信號(hào)處理、圖像處理或人工智能方法,判斷物體的運(yùn)動(dòng)方向。
文獻(xiàn)[1]通過采集目標(biāo)物體的運(yùn)動(dòng)圖像,根據(jù)移動(dòng)物體運(yùn)動(dòng)場(chǎng)和光流場(chǎng)的關(guān)系,由運(yùn)動(dòng)主方向確定物體移動(dòng)的方向,但需要進(jìn)行復(fù)雜的光流計(jì)算。文獻(xiàn)[2]利用幾何方法計(jì)算物體運(yùn)動(dòng)與背景運(yùn)動(dòng)的差異,從而獲得運(yùn)動(dòng)方向,但需要背景建模。文獻(xiàn)[3]采用融合深度信息的雙向人流量統(tǒng)計(jì)方法,使用結(jié)合目標(biāo)位置相似度與深度相似度的目標(biāo)匹配策略,提升軌跡關(guān)聯(lián)的可靠性和準(zhǔn)確性;為減少目標(biāo)頻繁遮擋導(dǎo)致軌跡匹配錯(cuò)誤等情況,用目標(biāo)的軌跡上下文深度差判斷人員遮擋狀態(tài);利用三維質(zhì)心坐標(biāo)判斷人員橫縱運(yùn)動(dòng)方向,處理相機(jī)視角變化和不規(guī)則運(yùn)動(dòng),以減少方向誤判。文獻(xiàn)[4]通過測(cè)定距離來確定物體的運(yùn)動(dòng)方向,指出超聲波方法實(shí)時(shí)性較高但精度較低,計(jì)算機(jī)視覺實(shí)時(shí)性較差但精度較高。文獻(xiàn)[5]推導(dǎo)了雷達(dá)差頻信號(hào)頻率及相位與目標(biāo)運(yùn)動(dòng)方向的關(guān)系,得到頻率及相位與目標(biāo)靠近或遠(yuǎn)離關(guān)系的判定法則,并設(shè)計(jì)了基于頻率和相位變化的判斷目標(biāo)運(yùn)動(dòng)方向的雙模判斷模塊。
以上方法對(duì)感知和計(jì)算資源的要求較高,成本也較高,不適合倉庫管理等應(yīng)用場(chǎng)景。如果在物體出入庫的同時(shí),還有其他人員在庫房大門附近活動(dòng),就會(huì)產(chǎn)生干擾,影響系統(tǒng)判斷物體出入庫的方向。
為達(dá)到降低成本、提高數(shù)據(jù)采集效果的目的,人們開始使用紅外對(duì)射器來檢測(cè)物體運(yùn)動(dòng)。文獻(xiàn)[6]利用紅外對(duì)射器觸發(fā)圖像采集,使得圖像更為清晰。文獻(xiàn)[7-9]利用紅外對(duì)射器觸發(fā)車輛的信息采集,但不用判斷車輛方向。文獻(xiàn)[10]利用2對(duì)紅外對(duì)射器檢測(cè)車輛的出入方向,并觸發(fā)信息采集,但其無法應(yīng)用于有人員干擾的復(fù)雜場(chǎng)景。
本文在倉庫管理應(yīng)用中,設(shè)計(jì)了一種利用多個(gè)紅外對(duì)射器判斷復(fù)雜場(chǎng)景下物體出入庫方向的方法。該方法根據(jù)獲取的紅外對(duì)射器狀態(tài)序列,計(jì)算其中的有效狀態(tài)子序列并與理想狀態(tài)序列比較,完成物體出入庫方向的判斷。
1 方法設(shè)計(jì)
1.1 感知設(shè)置
在倉庫管理過程中,出入庫作業(yè)需要準(zhǔn)確記錄大型貴重物體出庫或入庫的方向,由于管理限制,不能安裝攝像頭,也就不能采用圖像處理或人工智能的方式來實(shí)現(xiàn)物體出入庫方向的判斷。因此,決定利用多個(gè)紅外對(duì)射器實(shí)現(xiàn)對(duì)物體出入庫方向的判斷。
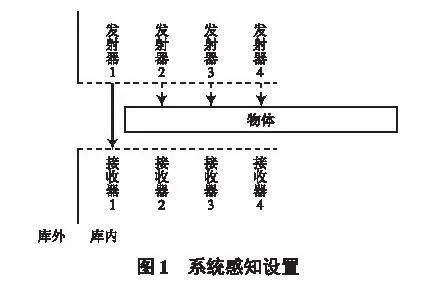
在出入庫作業(yè)中,大型物體的長度約10 m,移動(dòng)速度不超過1 m/s。在庫房?jī)?nèi)靠近大門處安裝了4個(gè)紅外對(duì)射器,相鄰2個(gè)紅外對(duì)射器之間的距離為0.5 m,物體在出入庫作業(yè)中,移動(dòng)0.5 m需要500 ms,而且物體遮擋4個(gè)紅外對(duì)射器的時(shí)間超過1.5 s。紅外對(duì)射器的數(shù)據(jù)采集周期為50 ms,足以采集到4個(gè)紅外對(duì)射器的狀態(tài)信息。系統(tǒng)感知設(shè)置如圖1所示。
1.2 方向判斷
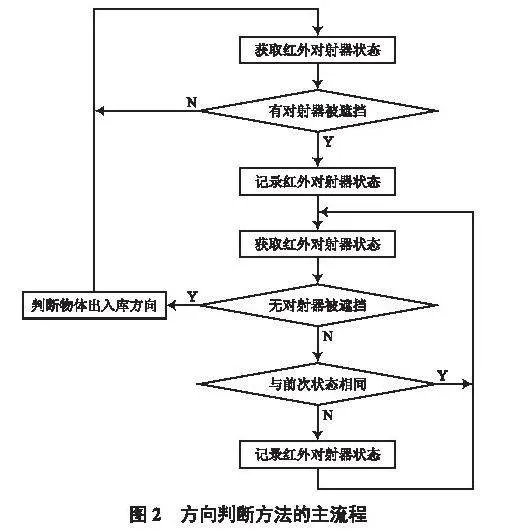
在出入庫作業(yè)過程中,通常有其他人員也在進(jìn)出庫房,為物體出入庫方向的判斷帶來極大干擾。由于物體尺寸比人員尺寸大一個(gè)數(shù)量級(jí),且人員通常無法同時(shí)將4個(gè)紅外對(duì)射器全部遮擋,因此,利用該特性設(shè)計(jì)了判斷物體出入庫方向的方法。
方向判斷方法的主要思想:在4個(gè)紅外對(duì)射器均未被遮擋時(shí),根據(jù)獲取的紅外對(duì)射狀態(tài)序列,判斷物體出入庫方向。方向判斷方法的主流程如圖2所示。
紅外對(duì)射器的狀態(tài)分為“被遮擋”和“未遮擋”,“1”表示“被遮擋”狀態(tài),“0”表示“未遮擋”狀態(tài)。4個(gè)紅外對(duì)射器可能的狀態(tài)有16種,用0x00~0x0F表示。例如,0x07表示紅外對(duì)射器1被遮擋、紅外對(duì)射器2被遮擋、紅外對(duì)射器3被遮擋、紅外對(duì)射器4未遮擋(1 B可以表示8個(gè)紅外對(duì)射器的狀態(tài))。
紅外對(duì)射器的狀態(tài)序列可以用1個(gè)字節(jié)流表示。例如,理想的入庫序列為:0x01, 0x03, 0x07, 0x0F, 0x0E, 0x0C, 0x08;理想的出庫序列為:0x08, 0x0C, 0x0E, 0x0F, 0x07, 0x03, 0x01。
由于存在干擾,采集的紅外對(duì)射器狀態(tài)序列不是理想的入庫序列或理想的出庫序列,實(shí)際的序列可能為:
0x08, 0x0C, 0x08, 0x0C, 0x08, 0x0C, 0x08, 0x0C, 0x08, 0x0C, 0x08, 0x0C, 0x08, 0x0C, 0x08, 0x0C, 0x04(無效序列);
0x08, 0x04, 0x01, 0x05, 0x0D, 0x0F, 0x0B, 0x0E, 0x0C, 0x0D, 0x0F, 0x0A, 0x0E, 0x0C, 0x08(入庫序列);
0x01, 0x03, 0x02, 0x04, 0x0C, 0x08, 0x0C, 0x0F, 0x07, 0x03, 0x01(出庫序列)。
實(shí)際序列中可能包含一部分或全部理想序列。現(xiàn)在,物體出入庫方向的判斷就變成計(jì)算實(shí)際序列中是否包含一部分或全部理想序列。實(shí)際序列可以分為3類:無效序列、出庫序列、入庫序列。
由于4個(gè)紅外對(duì)射器都會(huì)被遮擋,因此,實(shí)際序列中沒有0x0F的狀態(tài)就是無效序列;由于理想的出庫序列和入庫序列的長度均大于5,因此實(shí)際序列包含的理想出庫、入庫序列的子序列長度小于5時(shí),也是無效序列。
對(duì)于一個(gè)實(shí)際序列,計(jì)算其包含的理想出庫子序列和理想入庫子序列。如果理想出庫子序列長度大于理想入庫子序列長度,則為出庫序列;如果理想入庫子序列長度大于理想出庫子序列長度,則為入庫序列;如果理想出庫子序列長度等于理想入庫子序列長度,則為無效序列。
圖3給出了計(jì)算實(shí)際序列包含理想入庫子序列長度的流程,計(jì)算實(shí)際序列包含理想出庫子序列長度的流程與其類似。
2 實(shí)際應(yīng)用
將設(shè)計(jì)的方法和裝置應(yīng)用在實(shí)際倉庫的出入庫作業(yè)。在最初5天的測(cè)試中,共采集了186個(gè)紅外對(duì)射器序列,序列最小長度為5,最大長度為126。其中,對(duì)應(yīng)無效作業(yè)(人員出入)、入庫作業(yè)、出庫作業(yè)的序列數(shù)目分別為:140個(gè)、23個(gè)、23個(gè)。部分實(shí)際序列如下:
0x01, 0x03, 0x02, 0x04, 0x0C, 0x08, 0x09, 0x0A, 0x0E, 0x0C, 0x04, 0x0C, 0x04, 0x02, 0x03, 0x01(無效);
0x08, 0x0C, 0x04, 0x0C, 0x08, 0x04, 0x02, 0x06, 0x02, 0x06, 0x02, 0x06, 0x02, 0x06, 0x02, 0x01(無效);
0x01, 0x03, 0x02, 0x03, 0x02, 0x03, 0x02, 0x0A, 0x02, 0x06, 0x07, 0x03, 0x02, 0x03, 0x02, 0x01, 0x03, 0x02, 0x06, 0x0A, 0x03, 0x01, 0x03, 0x01, 0x05, 0x0D, 0x0F, 0x0B, 0x0F, 0x0A, 0x06(入庫);
0x01, 0x03, 0x02, 0x0A, 0x08, 0x0C, 0x0F, 0x0D, 0x0C, 0x0D, 0x08, 0x09, 0x08, 0x09, 0x08(入庫);
0x08, 0x0C, 0x04, 0x06, 0x04, 0x0F, 0x0D, 0x04, 0x06, 0x07, 0x06, 0x04, 0x05, 0x04(出庫);
0x08, 0x04, 0x0C, 0x08, 0x0A, 0x0E, 0x06, 0x0E, 0x06, 0x07, 0x05, 0x07, 0x05, 0x0D, 0x0F, 0x0D, 0x09, 0x0B, 0x09, 0x0D, 0x05, 0x01, 0x03, 0x02, 0x03, 0x02, 0x06, 0x07, 0x06, 0x04, 0x06, 0x04, 0x06, 0x07, 0x05, 0x04, 0x02, 0x03,"0x01(出庫)。
在實(shí)際測(cè)試中,測(cè)試準(zhǔn)確率較高,對(duì)無效序列、入庫序列的檢測(cè)準(zhǔn)確率達(dá)到了100%,對(duì)出庫序列的檢測(cè)準(zhǔn)確率達(dá)到了95.65%。
在進(jìn)行某1個(gè)出庫作業(yè)時(shí),出現(xiàn)了比較復(fù)雜的人員出入情況,使序列受到嚴(yán)重干擾,被判定為無效序列:0x04, 0x0C, 0x04, 0x05, 0x09, 0x0B, 0x0A, 0x0E, 0x0A, 0x08, 0x01, 0x05, 0x07, 0x0F, 0x0B, 0x04, 0x02。
3 結(jié) 語
根據(jù)倉庫管理應(yīng)用中的需求,本文設(shè)計(jì)了一種利用多個(gè)紅外對(duì)射器判斷復(fù)雜場(chǎng)景下物體出入庫方向的方法。該方法首先計(jì)算紅外對(duì)射器狀態(tài)序列中的有效狀態(tài)子序列,再與理想狀態(tài)序列比較,簡(jiǎn)單有效地判斷物體出入庫方向。盡管文中給出的是4個(gè)紅外對(duì)射器的例子,但該方法能夠推廣到更多應(yīng)用紅外對(duì)射器的場(chǎng)景。
參考文獻(xiàn)
[1]徐邦武.基于深度學(xué)習(xí)的運(yùn)動(dòng)目標(biāo)分割算法研究[D].無錫:江南大學(xué),2023.
[2]張文龍.動(dòng)觀測(cè)平臺(tái)下運(yùn)動(dòng)目標(biāo)檢測(cè)方法研究[D].長沙:國防科技大學(xué),2023.
[3]謝梓釗.小型機(jī)載平臺(tái)運(yùn)動(dòng)目標(biāo)檢測(cè)與硬件加速研究[D].武漢:華中科技大學(xué),2022.
[4]鄧永康.基于OpenCV運(yùn)動(dòng)目標(biāo)檢測(cè)的跟蹤系統(tǒng)開發(fā)[D].北京:北京化工大學(xué),2022.
[5]張文利,王寧,郭向,等.融合深度信息的雙向人流量統(tǒng)計(jì)方法的研究與實(shí)現(xiàn)[J].測(cè)控技術(shù),2021,40(5):52-61.
[6]滑冰.基于三維圖像的羽毛球運(yùn)動(dòng)合理性判斷方法研究與仿真[J].科學(xué)技術(shù)與工程,2017,17(10):231-235.
[7]戚昊琛,胡智文,張鑒. FMCW雷達(dá)系統(tǒng)的雙模方向判斷模塊研究[J].電子測(cè)量與儀器學(xué)報(bào),2014,28(5):486-492.
[8]折林芬.河灣煤礦磅房稱重防作弊系統(tǒng)設(shè)計(jì)[D].西安:西安科技大學(xué),2013.
[9]劉榮林.礦區(qū)鐵路低速車輛自動(dòng)識(shí)別系統(tǒng)的研究與應(yīng)用[J].自動(dòng)化應(yīng)用,2016(12):98-99.
[10]于繼明,何雷,樂振彬,等.多車道車輛進(jìn)出檢測(cè)算法設(shè)計(jì)與實(shí)現(xiàn)[J].金陵科技學(xué)院學(xué)報(bào),2017,33(2):5-8.
作者簡(jiǎn)介:李 楊(1986—),女,河北雄安人,碩士,高級(jí)工程師,主要研究方向?yàn)槲锫?lián)網(wǎng)應(yīng)用。
秦立德(1994—),男,陜西眉縣人,碩士,工程師,主要研究方向?yàn)槲锫?lián)網(wǎng)應(yīng)用。
史甜姝(1986—),女,黑龍江齊齊哈爾人,碩士,講師,主要研究方向?yàn)橹悄苡布b調(diào)與物流網(wǎng)技術(shù)。
蔣遂平(1966—),男,四川遂寧人,博士,研究員,主要研究方向?yàn)槲锫?lián)網(wǎng)技術(shù)。
收稿日期:2024-01-11 修回日期:2024-02-29
猜你喜歡
軟件導(dǎo)刊(2016年9期)2016-11-07 21:56:29
軟件導(dǎo)刊(2016年9期)2016-11-07 21:32:45
中國科技博覽(2016年22期)2016-11-01 15:02:01
中國科技博覽(2016年22期)2016-11-01 13:21:09
中國科技博覽(2016年19期)2016-10-19 14:58:22
電腦知識(shí)與技術(shù)(2016年21期)2016-10-18 22:33:02
科技視界(2016年22期)2016-10-18 17:23:30
中國新通信(2016年16期)2016-10-18 11:01:39
中國新通信(2016年16期)2016-10-18 11:00:54
科學(xué)與財(cái)富(2016年28期)2016-10-14 01:24:06

- 物聯(lián)網(wǎng)技術(shù)的其它文章
- OBE與任務(wù)驅(qū)動(dòng)融合在導(dǎo)論課程的研究與實(shí)踐
- 基于產(chǎn)教融合的物聯(lián)網(wǎng)工程專業(yè)建設(shè)研究與探索
- 物聯(lián)網(wǎng)技術(shù)在航空制造供應(yīng)鏈協(xié)同管理中的應(yīng)用探索
- 基于視覺感知的智能導(dǎo)盲杖系統(tǒng)應(yīng)用研究
- 基于ESP32的智能家居安防系統(tǒng)
- 基于物聯(lián)網(wǎng)技術(shù)的隧道風(fēng)機(jī)環(huán)境自適應(yīng)節(jié)能控制方法