廢液儲罐清理作業機器人系統設計
2025-01-31 00:00:00陳建朱靖朱性利張學賀
科技創新與應用 2025年2期






摘" 要:該文研制一種退役廢液儲罐清洗作業機器人系統。介紹該機器人的結構設計、運動學模型、軌跡規劃方法,可靈活移動、越障,實現對退役廢液儲罐的高效清理。實驗結果表明,該系統在平面和曲面壁上均具有卓越的規劃效果,為廢液儲罐清理提供一項關鍵技術。
關鍵詞:退役處理;清洗機器人;運動學模型;軌跡規劃;廢液儲罐
中圖分類號:TP242" " " 文獻標志碼:A" " " " " 文章編號:2095-2945(2025)02-0026-04
Abstract: In this paper, a robot system for cleaning retired waste liquid storage tanks is developed. The structural design, kinematic model, and trajectory planning method of the robot are introduced. It can flexibly move and overcome obstacles to achieve efficient cleaning of retired waste liquid storage tanks. Experimental results show that the system has excellent planning effect on both flat and curved walls, thereby providing a key technology for cleaning waste storage tanks.
Keywords: decommissioning; cleaning robot; kinematic model; trajectory planning; waste liquid storage tank
核能被認為是人類清潔、高效的能源之一,其可再生性引起了世界各國的極大關注。隨著大量早期民用核電反應堆陸續結束運行,全球核工業預計將在未來10至15年迎來歷史上第一輪退役高潮。目前,我國最早建設的核工業設施隨著使用年限的增長,大多數都面臨退役或已經完成退役。在核退役設施中,存在大量放射性固體廢物需要處理,通常采用水泥、金屬餅或玻璃固化的方式,或者利用高壓水槍進行清洗。相對于傳統的人工作業,這種處理方式具有更低的污染程度和更高的安全性,但仍然存在一定的挑戰[1]。
核退役機器人在高強度作業、持續時間和安全性等方面具有顯著優勢,相對于傳統的人工作業,污染更少、安全風險更小[2]。國內外部分國家的核退役技術已相對成熟,已經開發了一系列專用于核設施退役的機器人設備。德國的Top Tec系列機器人和芬蘭的Avant Robot 185機器人廣泛應用于工業生產和各種鋼筋混凝土的拆除任務中[3]。瑞典的Brokk公司已經研發了600多臺機器人,用于核工業領域的放射性廢物回收和處置、核設施退役拆除、儲罐拆除以及核設施去污和核事故應急救援等各個方面[4]。
在核退役設施中,廢液儲罐的清理工作尤為關鍵。為了降低人工操作的安全隱患并提高作業效率,本文成功研制出一種適應核輻射復雜環境的廢液儲罐清理作業機器人。這一創新性的機器人技術為核退役后處理提供了一種更安全、高效的廢液儲罐清理解決方案。
1" 廢液儲罐清理作業機器人系統
1.1" 總體介紹
廢液儲罐清理作業機器人設計移動底盤用于移動越障,搭載精密的液壓機械臂,利用高壓水槍清理廢液儲罐,使其在高輻射環境下具備高效、安全、精準的清理能力。廢液儲罐清理作業機器人具備精準控制和操作的能力,可執行各種復雜的清理任務,包括廢液儲罐內部的角落和難以到達的區域。
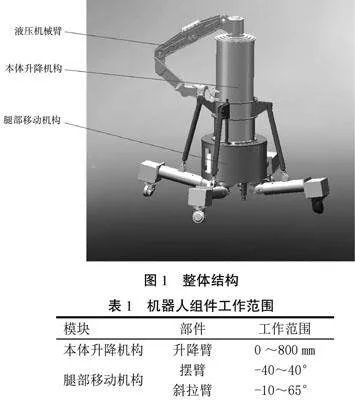
廢液儲罐清理作業機器人整體結構如圖1所示,機器人由液壓機械臂、本體升降機構、腿部移動機構等組成。
廢液儲罐清理作業機器人可通過腿部移動機構實現靈活越障,液壓機械臂配合本體升降機構可實現儲罐壁的全面清理,機器人各部件的工作范圍見表1。
1.2" 關鍵部件設計
作業機器人的腿部移動機構主要負責實現整個機器人在地面上的移動和壁障,主要由立式舵輪地面移動系統、支撐腿系統和腿部升降系統3部分組成,結構方案設計如圖2所示。
機器人在平滑的地面移動時,主要依靠安裝在4個支腿末端的立式舵輪來驅動每個立式舵輪都具有地面滾動和轉向2個自由度,分別采用獨立的伺服電機進行驅動,可實現靈活的轉向和直線移動,從而增強機器人在狹窄空間中作業的靈活性和壁障性能。
支撐腿系統是作業機器人機構整體的支撐部分,起到在機器人進行作業時穩定保持的作用。同時在機器人進行地面的移動時,通過4個支撐腿的姿態和角度調整,實現作業機器人的地面越障功能。支撐腿系統主要由實現左右擺動驅動的伺服電機、減速器、編碼器,實現上下擺動驅動的伺服驅動液壓缸、編碼器、力傳感器,用于越障時在中心進行機構輔助支撐的頂升液壓缸和支撐橫梁組成。
腿部升降系統是作業機器人能夠實現避障的關鍵部件,當作業機器人遇到障礙時,腿部升降系統會將作業機器人的腿部提升起來高過障礙物的高度,同時配合立式舵輪的行走使得機器人腿部能夠越過障礙。腿部升降系統也是作業機器人能夠通過廢液貯槽口的重要保證,當腿部升降系統運動至最遠端時,整個作業機器人的周向尺寸最小,能夠保證作業機器人無干涉地通過廢液貯槽口。
1.3" 運動學建模
核退役廢液儲罐清理作業機器人采用標準的D-H參數法建立機器人的運動模型[5],標準的D-H參數由相鄰桿件參數獲得,如圖3所示。
其中,兩岸坐標系建立的原則如下。
1)原點oi:設在li與Ai+1軸線的交點上。
2)zi軸:與Ai+1關節軸線重合,指向任意。
3)xi軸:與公法線li重合,指向沿l由Ai軸線指向Ai+1軸線。
4)yi軸:按右手定則。
5)特殊情況:當兩軸相交時,oi為關節軸向的交點,zi為Ai+1軸線,xi由zi-1與zi叉乘獲得,yi軸由右手定則獲得;當兩軸平行時,原點可按照簡單的來。
根據標準D-H參數法建立的坐標系如圖4所示,其中坐標系5和坐標系4原點處于同一位置。
采用D-H參數法對機械臂進行建模,具體參數見表2。
1.4" 軌跡規劃方法
完成機器人運動學建模之后,根據激光雷達掃描數據進行機器人運動空間的軌跡規劃。規劃過程中,將處理后的激光雷達數據作為機器人的原始路徑信息,后計算可達域和最大清掃面積。其基本流程如圖5所示。
對于激光雷達數據經過降噪處理后,首要任務是計算中點位置的距離,以驗證其是否在機械臂的靈活工作空間內。若機械臂無法覆蓋指定儲罐壁位置,必須通過底盤移動來調整機器人位置,經過移動、越障,確保機械臂能夠達到更為優越的工作姿態。此過程涉及對激光雷達掃描數據的深度分析,以及底盤運動的路徑規劃和控制,旨在確保機器人在復雜環境中能夠高效執行特定任務。
若機器人已到達較好的工作位置,需要判斷激光雷達數據類型。對于平面儲罐壁,需根據起始點和末端點進行線性插值;對于曲面儲罐壁,需要獲取曲面參數再進行插值,參數由以下公式獲取[6]。
對于數據中的起始點(x1,y1,z1)、中間點(x2,y2,z2),末端點(x3,y3,z3),曲線參數應為
D=2×(x1×(y2-y3)+x2×(y3-y1)+x3×(y1-y2)),
x0=((x+y)×(y2-y3)+(x+y)×(y3-y1)+(x+y)×(y1-y2))/D,
y0=((x+y)×(x3-x2)+(x+y)×(x1-x3)+(x+y)×(x2-x1))/D,
r=-0.50,
θ1=tan-1((x1-x0)/(y1-y0)),
θ2=tan-1((x3-x0)/(y3-y0))。
得到曲線參數后,依據初始角度和終止角度線性插值作為新的軌跡規劃點,基于擬定的高度差,由一系列插值曲線組成軌跡規劃曲面,進而求取最大的清洗面。
首先,對于插值曲面,通過逆運動學解析求解方式,對于能夠到達的位置賦1,不能到達的位置賦0。這樣,求最大矩形面積的問題就轉化成了求1構成的最大矩形。通過棧法求出最大矩形面的索引,以下是使用動態規劃和棧的方法求解最大矩形面積的基本步驟。
1)初始化變量:通過一個外循環遍歷二維列表的每一列,在每次循環開始時,初始化2個向量“up”和“down”,以及一個棧stack。
2)計算向上和向下的邊界:在內循環中,對矩陣的每一行進行遍歷。對于每一行,通過維護一個單調遞減棧stack,計算出向上和向下的邊界。分別計算向上邊界時,如果當前元素小于棧頂元素,則出棧,直到棧為空或者棧頂元素小于當前元素;向下邊界同理,只不過是從底部開始出棧。
3)計算面積:在第二個循環中,通過已計算的向上和向下邊界,計算當前柱子(矩陣元素)形成的矩形的面積。
4)更新最大面積:在每次計算矩形面積后,與之前得到的最大面積進行比較,如果當前矩形面積更大,則更新最大面積及對應的矩形的邊界坐標。
5)重復步驟1)—4):繼續外循環,遍歷所有列,重復以上步驟。最終得到最大矩形面的邊界坐標。
2" 仿真與實驗
根據對廢液儲罐清理作業機器人結構的設計,選擇合適的材料和零件搭建出廢液儲罐清理作業機器人系統,如圖6所示。
圖6" 廢液儲罐清理作業機器人
針對液壓機械臂軌跡規劃,在Coppeliasim仿真軟件中進行軌跡規劃仿真檢驗算法。首先,在仿真軟件中分別導入曲面壁模型和液壓機械臂URDF模型,設置關節限位,并導入仿真軟件中的2D laser scanner激光雷達作為測量工具。如圖7所示,在仿真中機械臂能夠以最大清洗面積清理曲面壁。
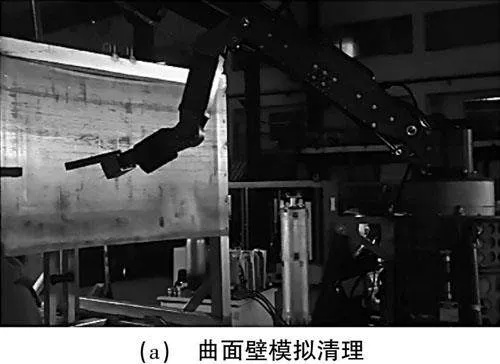
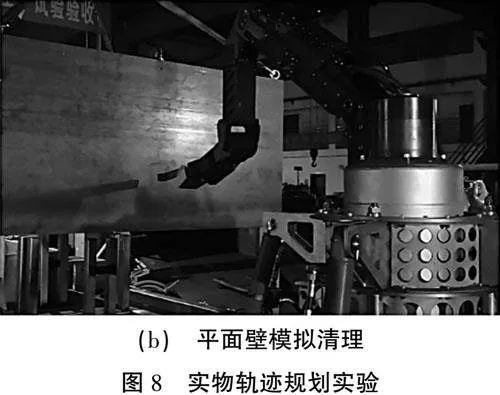
為了驗證廢液儲罐清理作業機器人的實際操作性能和實際工作能力,根據廢液儲罐的實際工作環境搭建曲面壁進行現場的軌跡規劃實驗。現場作業狀況如圖8所示。
實驗證明機械臂的運動學模型是準確無誤的,同時所采用的軌跡規劃算法在廢液儲罐清理作業機器人的運動中表現出色。具體而言,該算法在平面和曲面壁上均展現出卓越的規劃效果,為廢液清理任務提供了可靠的運動路徑規劃,確保機器人能夠高效地執行清理作業。
3" 結論
本研究成功研制出一種適應核輻射復雜環境的廢液儲罐清理作業機器人系統,能夠實現對核退役廢液儲罐的高效清理。實驗結果顯示,該機器人系統在平面和曲面壁上均取得了顯著的作業效果,為核工業的廢物管理提供了可靠、安全的解決方案。這一研究成果對于推動核工業設施的退役后處理工作,提高清理作業效率,降低人工作業污染和安全風險,具有重要的實際應用意義。
參考文獻:
[1] 劉俊輝,周偉.基于三次B樣條的六自由度液壓機械臂軌跡規劃[J].機床與液壓,2022,50(9):75-80.
[2] 何林軒.核退役場景機器人抓取關鍵技術研究[D].綿陽:西南科技大學,2022.
[3] 陳少南,鄧志燕,劉帥.核輻射復雜環境下新型智能拆解機器人系統設計研究[J].機器人技術與應用,2021(6):23-28.
[4] NAGATANI K, KIRIBAYASHI S, OKADA Y, et al. Emergency response to the nuclear accident at the fukushima daiichi nuclear power plants using mobile rescue robots[J]. Journal of Field Robotics,2013,30(1):44-63.
[5] 王東署,遲健男.機器人運動學標定綜述[J].計算機應用研究,2007,24(9):8-11.
[6] DINER N,EVIK M.Improved trajectory planning of an industrial parallel mechanism by acomposite polynomial consisting of Bézier curves and cubic polynomials[J].Mechanismand Machine Theory,2019,132(5):248-263.
第一作者簡介:陳建文(1994-),男,碩士,工程師。研究方向為核工業特種機器人。