車載網絡開發流程簡述
2025-02-03 00:00:00毛鴻霖岑仲善韓光省鄭繼翔魏文杰李保生
汽車電器 2025年1期






【摘" 要】隨著汽車產業發展,車載網絡應用不斷擴大。文章從概念設計、系統設計、測試驗證三方面介紹車載網絡開發流程,包括車載以太網、CAN/CANFD、LIN等。其中,概念設計階段進行需求分析并制定總線通信規范;系統設計階段考慮拓撲設計要點,進行通信矩陣、診斷協議設計及數據庫和整車仿真模型建立;測試驗證階段編制測試規范、開發測試環境、設計自動化測試用例并實施測試。最后總結車載網絡發展趨勢及本文對相關從業人員和汽車產業的意義。
【關鍵詞】車載網絡;車載以太網;CAN/CANFD;LIN
中圖分類號:U463.6"""" 文獻標識碼:A""" 文章編號:1003-8639(2025)01-0046-05
Introduction to the Development Process of Vehicle Network*
MAO Honglin1,CEN Zhongshan2,HAN Guangsheng1,ZHENG Jixiang1,WEI Wenjie1,LI Baosheng1
(1.CATARC(Tianjin)Automotive Engineering Research Institute Co.,Ltd.,Tianjin 300300;
2.Guangxi Eco-engineering Vocational and Technical College,Liuzhou 545004,China)
【Abstract】With the development of automobile industry,the application of vehicle-mounted network continues to expand. This paper introduces the development process of vehicle network from three aspects: concept design,system design,test and verification,including vehicle Ethernet,CAN/CANFD,LIN,etc. In the conceptual design phase,requirements are analyzed and bus communication specifications are formulated. In the stage of system design,the key points of topology design are considered,and the communication matrix,diagnostic protocol design and database and vehicle simulation model are established. In the test verification phase,test specification is prepared,test environment is developed,automated test cases are designed and tested. Finally,it summarizes the development trend of vehicle network and the significance of this paper to relevant practitioners and the automotive industry.
【Key words】vehicle network;on-board Ethernet;CAN/CANFD;LIN
1" 車載網絡拓撲發展趨勢
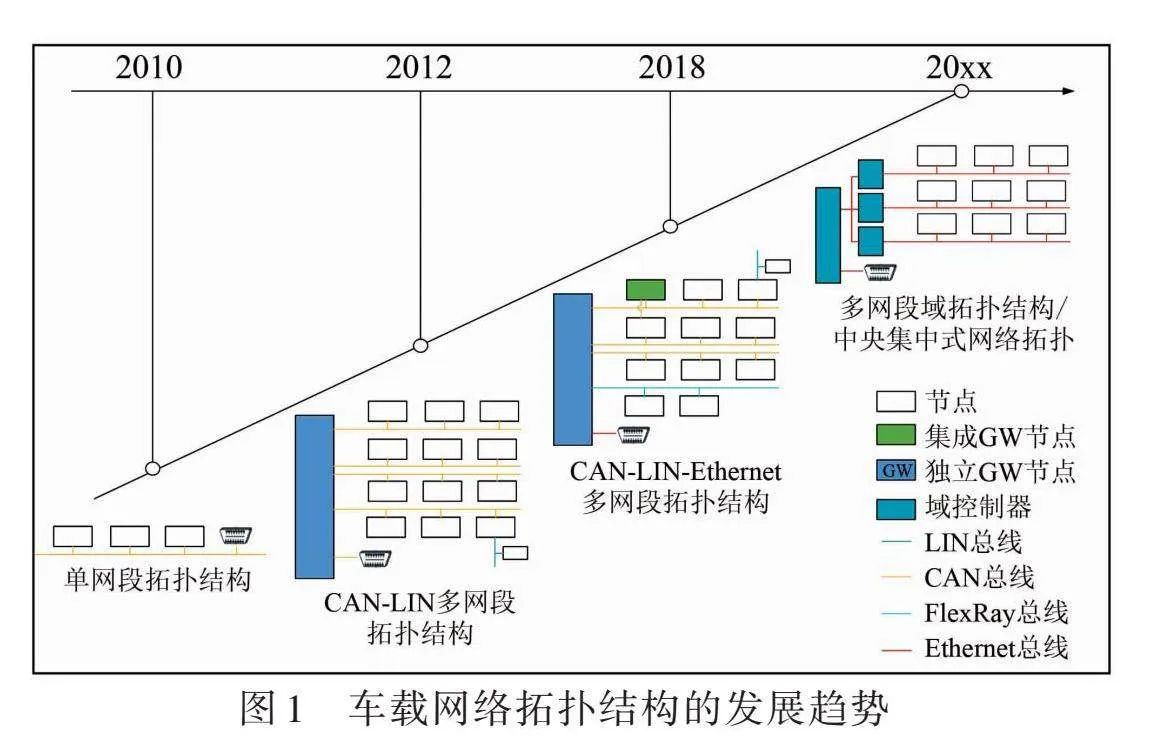
隨著車輛電動化、智能化、網聯化程度的不斷加深,空中下載技術OTA、車聯網通信技術V2X、高級輔助駕駛ADAS等高帶寬應用的需求不斷加大。由于智能網聯汽車不斷增加的電子電氣功能[1],使得電子控制單元(ECU)的數量急劇增加,并且負載率接近邊界值等因素,進而導致車載網絡拓撲結構呈現多元化發展態勢。圖1展示了車載網絡拓撲結構的發展歷程和未來趨勢,通過分析可知,車載網絡拓撲結構遵循著從單網段到CAN-LIN多網段,再到CAN-LIN-Ethernet多網段以及多網段域集中式的發展路徑,最終將會演進成為中央集中式網絡拓撲。
2" 車載網絡開發流程
車載網絡開發流程分為概念設計、系統設計、測試驗證3個階段,如圖2所示。
1)概念設計:依據車型的開發計劃、車型配置表、功能需求清單、對標車和平臺車型分析以及供應商調查表等,對目標車型進行需求分析,以明確網絡開發需求,進而編制與網絡總線開發相關的需求規范[2]。
2)系統設計:在綜合考慮成本以及可擴展性的基礎上,開展網絡拓撲結構設計、通信矩陣開發、診斷協議開發,并建立網絡仿真模型。
3)測試驗證:在設計規范制定完成后,立即進行測試規范的制定,最后對單節點、系統臺架以及整車進行網絡和診斷測試驗證。
3" 概念設計階段
概念設計又稱為網絡架構設計,主要根據目標車型需求分析和平臺需求來制定規范,從上層確定車載網絡的開發方向。
3.1" 概念階段需要進行多維度分析
1)配置需求分析:根據整車配置規劃清單和功能清單,對整車電氣零部件采用總線通信的節點數量進行初步預估。
2)整車功能需求分析:根據整車具體的功能需求,對網絡管理、診斷、刷寫、OTA升級等方面的需求進行評估。
3)對標車型分析:分析對標車型的網絡拓撲、網絡管理方式、重點關注新功能的通信方式、整體拓撲結構、新型總線的應用。
4)平臺車型分析:由于車型并非獨立于平臺存在,可參考現有平臺車型的網絡拓撲和總線矩陣,充分考慮其繼承性與擴展性。
5)供應商調查表分析:發放供應商網絡和診斷開發能力調查表,對現有及潛在供應商的當前方案、開發能力、技術路線進行調查,有助于確定網絡方案。
3.2" 總線通信規范設計
若企業在此之前沒有車載網絡總線規范,那么就需要建立企業級規范。對于CAN/LIN,相關規范包括物理層規范、高速CAN通信規范、ID分配規范、網絡管理需求規范、網關需求規范、診斷平臺需求規范、Bootloader刷新需求規范、LIN通信需求規范等。而對于Ethernet(以太網),相關規范有物理層需求規范、線束與連接器規范、IP層需求規范、SOME/IP需求規范、UDS on IP規范、Ethernet-CAN/CANFD網關路由需求規范、車載以太網配置規范、車載以太網UDP網絡管理規范等。
若企業已經擁有車載網絡總線平臺規范,那么就需要在對目標車型進行分析之后,考慮當前的總線規范是否滿足開發需求,例如網絡管理策略、網關路由策略等內容是否需要因車型而進行局部調整。如果需要調整,那么可以在平臺規范的基礎上進行適當修改,使其成為適用于目標車型的規范。
4" 系統設計階段
4.1" 拓撲設計考慮
車載網絡總線拓撲能直接反映整車各ECU通信系統之間的關系,其設計考慮點如下。
1)總線結構類型選擇:總線形、星形、環形、菊花鏈路形等總線結構。
2)網絡總線類型選擇:CAN、CANFD、LIN、車載以太網。
3)網關類型選擇:采用集成式網關(集成在域控制器)或獨立網關。
4)波特率(速率)選擇:車載以太網速率選擇1000Base、100Base、10Base,CAN/CANFD波特率選擇2Mb/s、500kb/s、250kb/s、125kb/s。
5)網絡管理類型選項:采用AUTOSAR還是OESK網絡管理,支持不同網絡管理協議的節點不允許放在同一網段。
6)終端電阻布置位置:電阻集成在各網段最遠端的ECU中。
7)私有網段和跨接網段使用:當某些網段上的控制器過多時,可建立私有網絡以減少對公共網絡的影響[3];對于需要和多個域進行交互的控制器,由于交互數量多且報文周期短,建議該ECU通過跨接網段來減少總線負載率。
8)考慮ECU刷寫:是否支持Bootloader刷寫、并行刷寫,且兼容本地刷寫與遠程刷寫。
9)考慮標定、診斷和刷寫:推薦采用統一路徑,同時允許特殊節點采用單獨的標定、診斷或刷寫網段。
10)考慮節點布置位置:基于ECU功能需求,將功能相關且功能交互頻繁的節點盡量布置在同一網段(如動力、底盤、信息娛樂、車身、智能駕駛等網段),以減少信號路由。
11)總線帶寬與負載率:根據帶寬需求及成本情況,選擇合適的協議傳輸,確保網絡負載率對消息延時的影響不超過±10%。
12)考慮整車的網絡安全:防火墻、獨立診斷網段的設計能有效防止數據泄露。
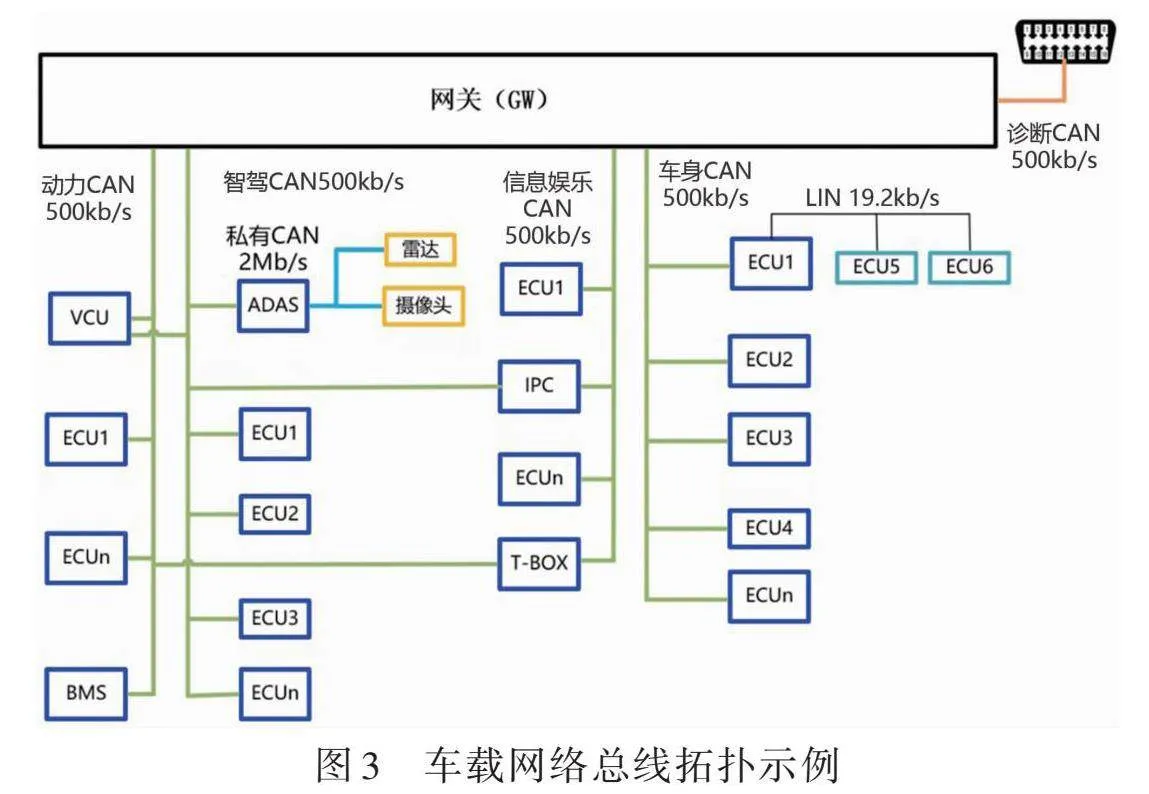
車載網絡總線拓撲示例如圖3所示。因功能控制器較多,采用獨立網關按照功能建立動力、智能駕駛、信息娛樂、車身、診斷網段;多個控制器(VCU、T-BOX、IPC)采用雙路總線跨接,分別發送和接收信號,降低總線負載率;控制器自身的傳感器或執行器功能通信采用多路LIN總線實現;ADAS輔助駕駛系統使用私有CAN進行多傳感器的信息融合,減少對公共CAN的影響。
4.2" 通信矩陣設計
4.2.1" CAN/LIN通信矩陣設計
與產品工程師或供應商展開交流,明確各電子控制單元(ECU)的信號發送(TX)和接收(RX)需求,從而完成信號接口控制文檔(ICD)收發列表。該列表包含信號名稱、信號長度、信號精度、信號范圍、信號發送類型以及收發關系等信息。網絡工程師把信號封裝成報文,制定報文名稱、報文標識(ID)和報文發送類型,依此編制整車通信矩陣。對于跨網段傳輸的報文,需要制定網關報文路由列表。通信矩陣示例如圖4所示。
4.2.2" 車載以太網SOME/IP通信矩陣設計
架構工程師依據功能架構開發的相關輸入文檔,完成用例(Use Case)列表的開發工作。用例列表是服務導向可擴展中間件(SOME/IP)通信矩陣開發的重要輸入,其包含的屬性有:系統名稱、功能名稱、使用場景、使用場景描述、前置條件、觸發條件、動態序列交互、傳輸數據、傳輸數據類型、最大數據長度、發送頻率要求、傳輸介質。
網絡工程師將用例列表作為SOME/IP通信矩陣定義的輸入文檔,把用例列表中的傳輸數據逐一映射到SOME/IP通信矩陣當中,其中包括:服務名稱、服務ID、服務描述、遠程過程調用(RPC)類型、方法/事件ID、傳輸層協議、發送策略、發送周期等信息。車載以太網SOME/IP通信矩陣示例如圖5所示。
4.3" 診斷協議設計
根據控制器功能需求設計ECU支持的診斷服務、診斷參數和安全算法開發、EOL下線流程開發,完成ECU診斷開發。圖6為ECU支持的診斷服務列表示例。
1)支持的UDS診斷服務列表,如0x10診斷模式控制、0x11電控單元復位、0x27安全訪問、0x28通信控制、0x22讀取數據、0x2E寫入數據、0x19讀取診斷信息等。
2)DTC列表顯示ECU支持的所有診斷故障碼清單。
3)讀寫DID列表顯示通過0x22、0x2A或0x2E服務執行節點標識的讀取或寫入操作。
4)根據ECU特性開發Bootloader刷寫流程。
5)根據安全訪問算法配置規范以及節點的算法掩碼輸入,為每個控制器開發不同安全等級的安全算法dll文件,dll文件的輸出函數均有清晰的函數名、參數列表、返回類型等,兼容符合標準的診斷設備及測試設備。
6)開發EOL下線流程問卷,包含所需診斷服務、DID、EOL流程描述、EOL流程圖等技術要素;ECU零部件供應商填寫具體的技術要素參數后,進行邏輯審核,并組織問題討論和定版。
4.4" 數據庫和整車仿真模型建立
使用CANoe.db++進行CAN網絡數據庫DBC文件的設計;使用LDF Explorer進行LIN數據庫LDF文件的設計;使用PREEvision軟件進行車載以太網的數據庫ARXML文件的設計;利用CANdelaStudio軟件建立各ECU診斷數據庫CDD文件,CDD文件主要用于支持UDS診斷協議的ECU在開發階段進行測試驗證,也可使用轉換軟件生成ODX文件應用于產線和售后診斷階段。
使用CANoe建立整車網絡仿真模型(圖7),根據網絡設計規范建立仿真模型、設計人機交互界面、開發仿真程序得出總線負載率及延遲率分析報告。
5" 測試驗證階段
5.1" 測試規范開發-編制測試規范
編制符合需求規范的測試規范,定義測試目的、測試步驟、測試評價結果。
CAN/LIN總線測試規范有:CAN通信測試規范、LIN通信測試規范、OSEK網絡管理測試規范、AUTOSAR網絡管理測試規范、網關測試規范、診斷協議測試規范、Bootloader測試規范、系統集成測試規范、整車測試規范。
車載以太網測試規范有:節點物理層測試規范、協議一致性測試規范、交換機測試規范、UDS測試規范、Bootloader測試規范、DoIP協議測試規范、SOME/IP測試規范、網關路由測試規范、gPTP測試規范、系統和實車測試規范。
5.2" 測試環境開發
測試前期需要基于ECU線束ICD以及零部件供應商提供的接插件制作用于單節點網絡測試的專用線束。可根據車型的需求開發適用于系統測試的柜式臺架(圖8),或使用真實線束在車型臺架搭建系統臺架環境。
5.3" 自動化測試用例設計及測試實施
開發自動化測試用例以實現電子控制單元(ECU)高效的網絡測試。對于CAN總線測試用例設計涵蓋物理層、數據鏈路層、網絡管理、應用層、網關測試等方面;LIN總線測試用例設計包括物理層、數據鏈路層、網絡管理以及魯棒性等內容;車載以太網測試用例設計包含物理層PMA和IOP、TC8 3.0協議一致性、診斷互聯協議(DoIP)協議、網關路由、網絡管理、應用層等。
車載網絡通過ECU單節點測試、系統集成測試、整車測試來驗證ECU符合設計規范,從而保障車輛各ECU間通信的穩定性。
6" 結束語
隨著車聯網技術的快速發展,整車的智能座艙、人機交互、智能駕駛等功能順勢而生,并逐漸成為汽車發展的主流方向[4]。車載網絡在汽車中的應用將會更加廣泛,網絡總線類型也會更加多樣化。本文從車載網絡的概念設計、系統設計、測試驗證三方面對車載網絡開發流程進行了簡要介紹,為相關從業人員提供了一定的技術參考[5],同時也為汽車產業的發展提供了技術支持。
參考文獻
[1] 李林澤,石如泉,徐嫚,等.以太環網架構的發展趨勢及其在智能網聯汽車中的應用[J].時代汽車,2021(12):23-24.
[2] 王歡,杜全輝,尹華軍,等.純電動轎車CAN總線系統開發[J].汽車工程學報,2011,1(2):147-152.
[3] 李廣大,宋菊,宋明昊.車載通信總線帶寬資源的控制方法[J].汽車電器,2024(7):32-36,39.
[4] 姬楠,谷原野,王邵龍,等.車載以太網物理層互操作性測試研究[J].汽車電器,2024(5):78-80.
[5] 楊子.車載以太網關鍵技術的研究[J].自動化應用,2024,65(12):256-258.
(編輯" 凌" 波)