車輛穩(wěn)定性因數(shù)自學(xué)習(xí)策略研究
2025-02-03 00:00:00李順波汪震隆梁海波
汽車電器 2025年1期


【摘" 要】穩(wěn)定性因數(shù)是表征汽車穩(wěn)態(tài)響應(yīng)的關(guān)鍵參數(shù),對(duì)車輛橫擺控制至關(guān)重要。由于影響穩(wěn)定性因數(shù)的因素眾多,如整車質(zhì)量、質(zhì)心位置、輪胎氣壓和側(cè)偏剛度等,準(zhǔn)確獲取穩(wěn)定性因數(shù)頗具難度。同時(shí),車輛行駛過程中,輪胎磨損、胎壓變化或輪胎型號(hào)改變等都會(huì)導(dǎo)致穩(wěn)定性因數(shù)變化,進(jìn)而影響車輛橫擺控制。基于此背景,文章以穩(wěn)定性因數(shù)理論模型為基礎(chǔ),結(jié)合車輛運(yùn)動(dòng)學(xué)方程,開發(fā)車輛穩(wěn)定性因數(shù)自學(xué)習(xí)策略。實(shí)車測(cè)試表明,該方法能有效修正車輛穩(wěn)定性因數(shù),提升橫擺控制效果。
【關(guān)鍵詞】橫擺控制;穩(wěn)定性因數(shù);自學(xué)習(xí)
中圖分類號(hào):U463.3"""" 文獻(xiàn)標(biāo)識(shí)碼:A""" 文章編號(hào):1003-8639(2025)01-0056-04
Research on Self-learning Strategy of Vehicle Stability Factor
LI Shunbo,WANG Zhenlong,LIANG Haibo
(Geely Auto Research Institute(Ningbo)Co.,Ltd.,Ningbo 315336,China)
【Abstract】Stability factor is a key parameter to characterize the steady-state response of vehicles,and it is very important for vehicle yaw control. Due to many factors affecting the stability factor,such as vehicle mass,center of mass position,tire pressure and side stiffness,it is difficult to obtain the stability factor accurately. At the same time,in the process of vehicle driving,tire wear,tire pressure changes or tire model changes will lead to changes in the stability factor,which will affect the vehicle yaw control. Based on this background,this paper develops the vehicle stability factor self-learning strategy based on the stability factor theory model and vehicle kinematics equation. The test results show that this method can effectively modify the vehicle stability factor and improve the yaw control effect.
【Key words】yaw control;stability factor;self-learning
0" 引言
穩(wěn)定性因數(shù)K作為表征汽車穩(wěn)態(tài)響應(yīng)的重要參數(shù),在車輛橫擺控制中對(duì)目標(biāo)橫擺角速度的計(jì)算起著關(guān)鍵作用[1]。其數(shù)值決定了汽車的轉(zhuǎn)向特性,當(dāng)[K=0]時(shí),汽車表現(xiàn)為中性轉(zhuǎn)向;當(dāng)[Kgt;0]時(shí),汽車表現(xiàn)為不足轉(zhuǎn)向特性;當(dāng)[Klt;0]時(shí),汽車表現(xiàn)為過多轉(zhuǎn)向。通常車輛多表現(xiàn)為不足轉(zhuǎn)向特性。
在車輛橫擺控制中,一般使用整車實(shí)際橫擺角速度[ωact]和質(zhì)心側(cè)偏角實(shí)際值[βact]來(lái)表征車輛當(dāng)前的運(yùn)動(dòng)狀態(tài),同時(shí)通過目標(biāo)橫擺角速度[ωtarget]和目標(biāo)側(cè)偏角[βtarget]來(lái)體現(xiàn)駕駛員期望的運(yùn)動(dòng)狀態(tài)。通過對(duì)狀態(tài)偏差進(jìn)行反饋控制,能夠使車輛的行駛軌跡盡可能地接近駕駛員的預(yù)期[2],從而提高車輛的操縱性和穩(wěn)定性。因此,準(zhǔn)確計(jì)算目標(biāo)橫擺角速度[ωtarget]顯得尤為重要。而目標(biāo)橫擺角速度的計(jì)算又與車輛的穩(wěn)定性因數(shù)息息相關(guān)。
穩(wěn)定性因數(shù)[K]的值與車輛眾多參數(shù)有關(guān),包括?整車質(zhì)量、?質(zhì)心位置、?輪胎氣壓和?側(cè)偏剛度等[3]。在車輛的行駛過程中,輪胎的磨損、胎壓的變化、整車質(zhì)量的變化或者輪胎型號(hào)的變化都會(huì)導(dǎo)致穩(wěn)定性因數(shù)的變化。與此同時(shí),在汽車動(dòng)態(tài)運(yùn)動(dòng)過程中,穩(wěn)定性因數(shù)與轉(zhuǎn)向輸入以及整車動(dòng)力學(xué)狀態(tài)(如橫向加速度、橫擺角速度及路面輔助特性等)息息相關(guān)。若不對(duì)其進(jìn)行適應(yīng)性修正,就會(huì)影響車輛的橫擺控制效果,進(jìn)而對(duì)車輛的操縱穩(wěn)定性產(chǎn)生不良影響。
本文基于穩(wěn)定性因數(shù)理論模型,依據(jù)二自由度整車模型和車輛運(yùn)動(dòng)學(xué)方程,開發(fā)穩(wěn)定性因數(shù)自學(xué)習(xí)策略,并通過Simulink仿真及實(shí)車測(cè)試驗(yàn)證該策略的有效性。
1" 穩(wěn)定性因數(shù)理論計(jì)算
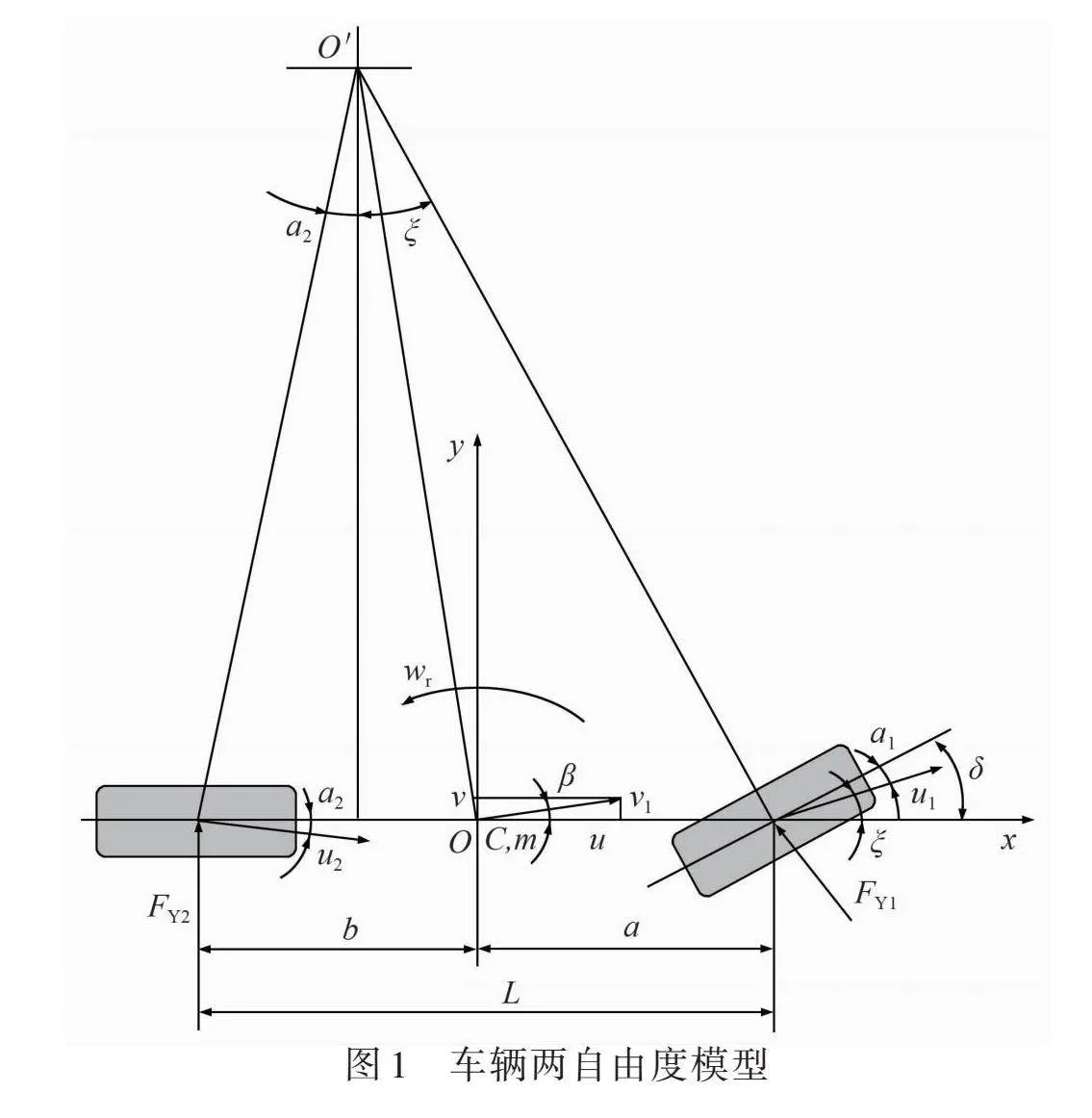
在對(duì)穩(wěn)定性因數(shù)進(jìn)行理論計(jì)算研究時(shí),需對(duì)車輛模型進(jìn)行適當(dāng)?shù)募僭O(shè):①忽略轉(zhuǎn)向系統(tǒng)的影響,將前輪轉(zhuǎn)角作為輸入;②忽略懸架作用,認(rèn)定汽車車廂僅進(jìn)行平行于地面的平面運(yùn)動(dòng),即只考慮y軸的側(cè)向運(yùn)動(dòng)和繞z軸的橫擺運(yùn)動(dòng),此時(shí),汽車沿z軸的位移,繞y軸的俯仰角與繞x軸的側(cè)傾角均為0;③將汽車前進(jìn)的速度[u]視為恒定值;④把側(cè)向加速度限定在0.4g以下,以確保輪胎側(cè)偏特性處于線性范圍內(nèi);⑤由于驅(qū)動(dòng)力不大,不考慮地面切向力對(duì)輪胎側(cè)偏特性的影響;⑥忽略空氣阻力的影響。
基于上述假設(shè),汽車被簡(jiǎn)化為只有側(cè)向和橫擺兩個(gè)自由度的模型。分析時(shí),令車輛坐標(biāo)系原點(diǎn)與汽車質(zhì)心重合。車輛兩自由度模型如圖1所示。
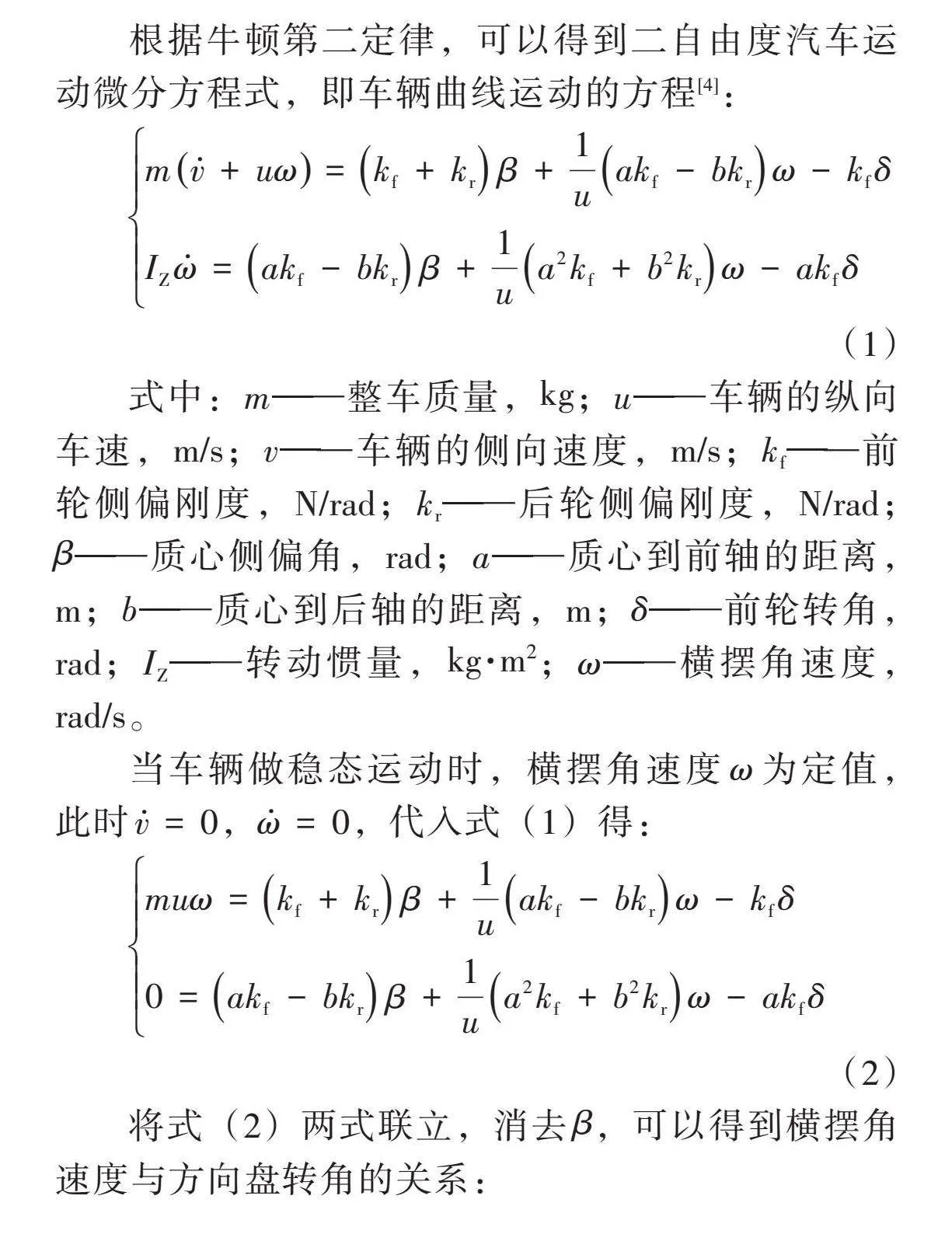
根據(jù)牛頓第二定律,可以得到二自由度汽車運(yùn)動(dòng)微分方程式,即車輛曲線運(yùn)動(dòng)的方程[4]:
[mv+uω=kf+krβ+1uakf?bkrω?kfδIZω=akf?bkrβ+1ua2kf+b2krω?akfδ]
(1)
式中:[m]——整車質(zhì)量,[kg];[u]——車輛的縱向車速,[m/s];[v]——車輛的側(cè)向速度,[m/s];[kf]——前輪側(cè)偏剛度,[N/rad];[kr]——后輪側(cè)偏剛度,[N/rad];[β]——質(zhì)心側(cè)偏角,[rad];[a]——質(zhì)心到前軸的距離,[m];[b]——質(zhì)心到后軸的距離,[m];[δ]——前輪轉(zhuǎn)角,[rad];[IZ]——轉(zhuǎn)動(dòng)慣量,[kg·m2];[ω]——橫擺角速度,[rad/s]。
當(dāng)車輛做穩(wěn)態(tài)運(yùn)動(dòng)時(shí),橫擺角速度[ω]為定值,此時(shí)[v=0],[ω=0],代入式(1)得:
[muω=kf+krβ+1uakf?bkrω?kfδ0=akf?bkrβ+1ua2kf+b2krω?akfδ]
(2)
將式(2)兩式聯(lián)立,消去[β],可以得到橫擺角速度與方向盤轉(zhuǎn)角的關(guān)系:
[ω=uLδ?11+mL2(akr?bkf)u2] (3)
1.1" 理論模型計(jì)算
根據(jù)式(3),可得表征汽車轉(zhuǎn)向特性的穩(wěn)定性因數(shù)[K]表達(dá)式為:
[K=mL2(akr?bkf)] (4)
上式即為穩(wěn)定性因數(shù)的理論計(jì)算公式。從式(4)可以看出,當(dāng)車輛靜止時(shí),穩(wěn)定性因數(shù)僅與車輛固有參數(shù)有關(guān),這便是車輛的基礎(chǔ)穩(wěn)定性因數(shù)。然而,質(zhì)心到前后軸的距離[a、b]及輪胎的側(cè)偏剛度[kf]、[kr]受車輛的運(yùn)動(dòng)狀態(tài)影響較大。例如,當(dāng)車輛加速時(shí),質(zhì)心會(huì)向后轉(zhuǎn)移,導(dǎo)致質(zhì)心到后軸的距離減小,到前軸的距離增大;同時(shí),載荷也會(huì)向后轉(zhuǎn)移,使得后軸的側(cè)偏剛度增大,前軸的側(cè)偏剛度減小。這些情況都會(huì)影響穩(wěn)定性因數(shù)。因此,有必要對(duì)車輛在運(yùn)動(dòng)狀態(tài)下穩(wěn)定性因數(shù)的計(jì)算方法進(jìn)行研究。
1.2" 車輛運(yùn)動(dòng)學(xué)模型
根據(jù)車輛的穩(wěn)態(tài)運(yùn)動(dòng)學(xué)方程(3)及式(4),可得:
[ω=VLδ?11+KV2] (5)
由式(5)可以得到:
[K=(VδωL?1)/V2] (6)
式(6)即為車輛在穩(wěn)態(tài)工況下的穩(wěn)定性因數(shù)[K]的運(yùn)動(dòng)學(xué)計(jì)算公式。
在式(6)中,[ω、V]均可以通過傳感器獲得,[δ]為前輪轉(zhuǎn)角,可通過方向盤轉(zhuǎn)角獲得,因而通過式(6)可以得到穩(wěn)定性因數(shù)[K]實(shí)時(shí)計(jì)算的公式。
綜上所述,穩(wěn)定性因數(shù)由兩部分組成,一部分是基礎(chǔ)穩(wěn)定性因數(shù),即靜態(tài)穩(wěn)定性因數(shù),這部分當(dāng)車輛參數(shù)確定后固定不變;另一部分是動(dòng)態(tài)穩(wěn)定性因數(shù),這部分隨著車輛的運(yùn)動(dòng)狀態(tài)而發(fā)生改變。因此,穩(wěn)定性因數(shù)的計(jì)算需要綜合考慮上述兩種情況。
1.3" 穩(wěn)定性因數(shù)自學(xué)習(xí)算法
當(dāng)整車參數(shù)確定后,可由式(4)得到基礎(chǔ)穩(wěn)定性因數(shù)[Kb],并將其作為當(dāng)前穩(wěn)定性因數(shù)[Kcur]的初始值[Kinit]。然而,由于車輛輪胎的磨損、胎壓的變化、整車質(zhì)量以及運(yùn)動(dòng)狀態(tài)等因素的影響,實(shí)際車輛穩(wěn)定性因數(shù)與基礎(chǔ)穩(wěn)定性因數(shù)存在一定偏差。當(dāng)車輛穩(wěn)態(tài)運(yùn)動(dòng)時(shí),可由式(6)得到車輛的實(shí)時(shí)穩(wěn)定性因數(shù)[Kact]。但由于車輛實(shí)際的運(yùn)動(dòng)很難保證穩(wěn)態(tài)運(yùn)動(dòng),故[Kact]的波動(dòng)是比較大的,不能直接用于穩(wěn)定性因數(shù)的修正。不過,車輛的穩(wěn)定性因數(shù)[Kcur]應(yīng)處于基礎(chǔ)穩(wěn)定性因數(shù)[Kb]和實(shí)時(shí)穩(wěn)定性因數(shù)[Kact]之間。基于上述分析,采用局部尋優(yōu)算法對(duì)穩(wěn)定性因數(shù)[K]進(jìn)行修正。
以目標(biāo)橫擺角速度與實(shí)際橫擺角速度之差最小作為優(yōu)化目標(biāo),得到:
[JP=ωtarget?ωact]" (7)
根據(jù)式(5),可得到[ωtarget]的計(jì)算公式:
[ωtarget=VLδ?11+KestV2] (8)
[ωact]可通過傳感器獲得,聯(lián)立式(7)、式(8)得:
[JP=VLδ?11+KestV2?ωact]" (9)
式(9)即為穩(wěn)定性因數(shù)[Kest]的優(yōu)化目標(biāo)。
設(shè)[Kinitlt;Kcur≤Kact],采取如下步驟對(duì)穩(wěn)定性因數(shù)[Kest]進(jìn)行估計(jì)。
分別計(jì)算當(dāng)[Kcur=Kinit],[Kcur=Kact],[Kcur=Kavg=Kinit+Kact2]時(shí)的優(yōu)化目標(biāo)函數(shù)[JP,init],[JP,act]和[JP,avg],將得到的3個(gè)數(shù)進(jìn)行比較:①[JP,init]最小,說明穩(wěn)定性因數(shù)[Kcur]不需要修正,[Kcur=Kinit],尋優(yōu)結(jié)束;②[JP,act]最小,說明穩(wěn)定性因數(shù)[Kcur]等于實(shí)際穩(wěn)定性因數(shù),[Kcur=Kact],尋優(yōu)結(jié)束;③[ JP,avg]最小,說明穩(wěn)定性因數(shù)[Kcur]介于[Kinit]和[Kact]之間,需進(jìn)一步尋優(yōu)。其中,針對(duì)情況③可以進(jìn)行以下分析。
1)若[JP,initlt;JP,act],則說明穩(wěn)定因數(shù)介于[JP,init]和[JP,avg]之間,進(jìn)一步計(jì)算當(dāng)[Kcur=Kinit+Kavg2]的最優(yōu)函數(shù)[J'P]。若[J'Plt;JP,avg],則[Kcur=Kinit+Kavg2],尋優(yōu)結(jié)束;若[J'Pgt;JP,avg],則[Kcur=Kavg],尋優(yōu)結(jié)束。
2)若[JP,initgt;JP,act],則說明穩(wěn)定因數(shù)介于[JP,act]和[JP,avg]之間,進(jìn)一步計(jì)算當(dāng)[Kcur=JP,act+Kavg2]的最優(yōu)函數(shù)[J''P]。若[J''Plt;JP,avg],則[Kcur=Kact+Kavg2],尋優(yōu)結(jié)束;若[J''Pgt;JP,avg],則[Kcur=Kavg],尋優(yōu)結(jié)束。
以上,即為穩(wěn)定性因數(shù)[Kcur]的尋優(yōu)算法。
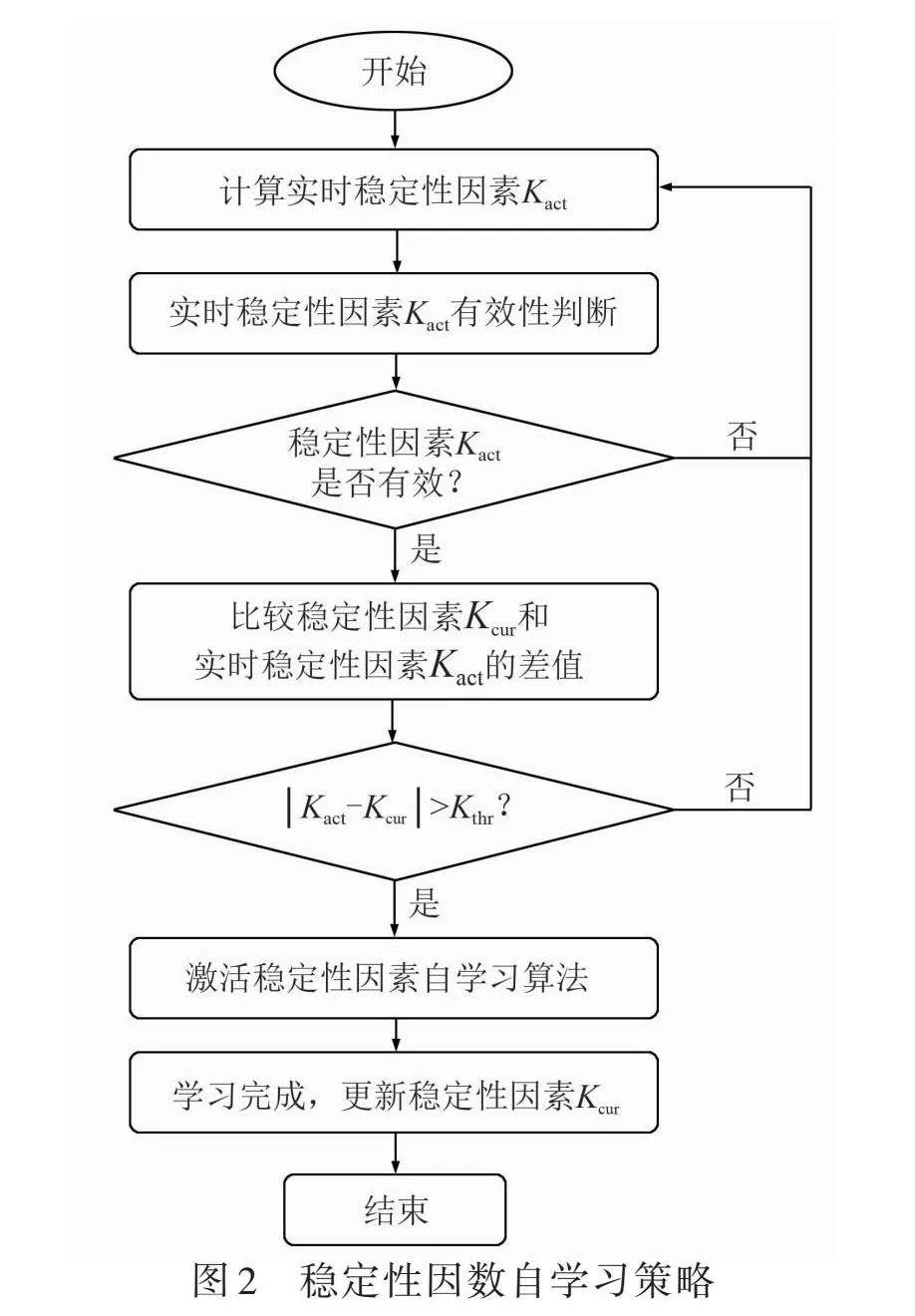
2" 穩(wěn)定性因數(shù)自學(xué)習(xí)控制策略
根據(jù)以上分析,設(shè)計(jì)穩(wěn)定性因數(shù)自學(xué)習(xí)策略,如圖2所示。從圖2可以看出,穩(wěn)定性因數(shù)自學(xué)習(xí)策略分為如下幾個(gè)部分。
1)實(shí)時(shí)穩(wěn)定性因數(shù)計(jì)算。根據(jù)式(6)計(jì)算實(shí)時(shí)穩(wěn)定性因數(shù)[Kact]。
2)判斷實(shí)時(shí)性穩(wěn)定性因數(shù)的有效性。因?yàn)槭剑?)在車輛穩(wěn)態(tài)運(yùn)動(dòng)下才能成立,即當(dāng)滿足如下條件時(shí),實(shí)時(shí)穩(wěn)定性因數(shù)[Kact]是有效的:①側(cè)向加速度小于0.6g;②縱向加速度小于0.1g;③車速小于80km/h。
3)將當(dāng)前穩(wěn)定性因數(shù)[Kcur]與實(shí)時(shí)穩(wěn)定性因數(shù)[Kact]進(jìn)行比較,如果二者相差較大,則激活穩(wěn)定性因數(shù)自學(xué)習(xí)算法;否則,保持當(dāng)前的穩(wěn)定性因數(shù)值[Kcur]。
4)穩(wěn)定性因數(shù)自學(xué)習(xí)算法詳見1.3部分描述。
5)穩(wěn)定性因數(shù)自學(xué)習(xí)完成后,更新車輛穩(wěn)定性因數(shù)。
3" 仿真模型搭建及實(shí)車驗(yàn)證
3.1" 仿真模型搭建
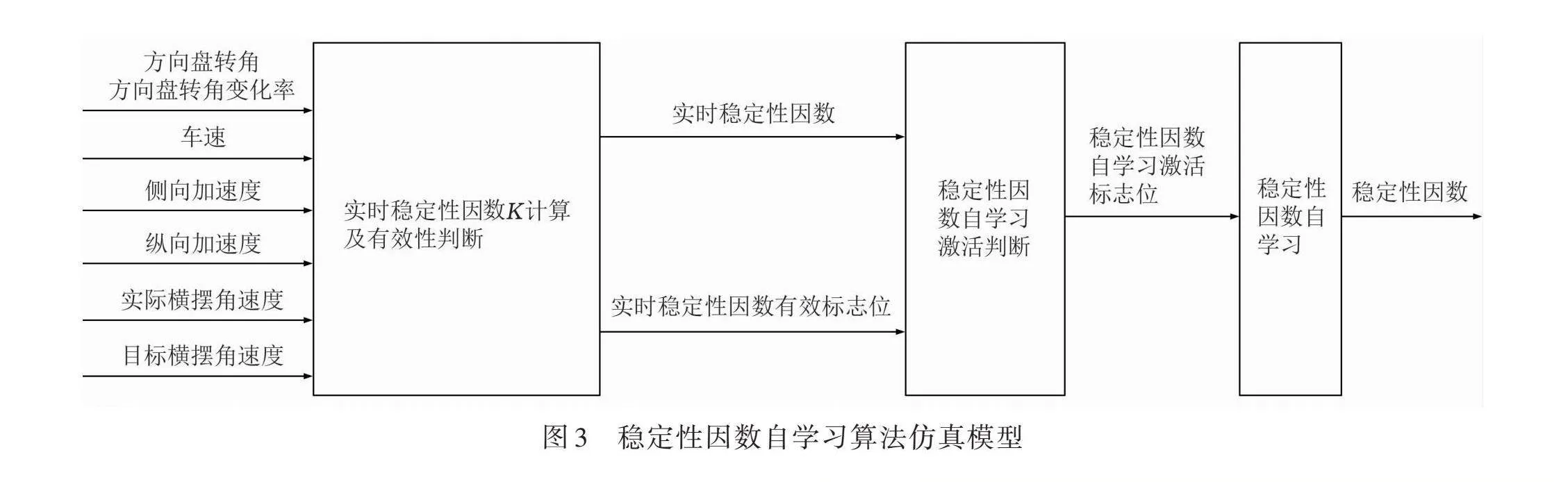
根據(jù)自學(xué)習(xí)控制策略搭建了仿真模型,該模型分為3個(gè)部分,如圖3所示。
1)實(shí)時(shí)穩(wěn)定性因數(shù)計(jì)算及有效性判斷:計(jì)算實(shí)時(shí)穩(wěn)定性因數(shù)[Kact],并進(jìn)行有效性判斷。判斷依據(jù)為當(dāng)車輛處于穩(wěn)態(tài)工況時(shí),實(shí)時(shí)穩(wěn)定性因數(shù)[Kact]有效。
2)穩(wěn)定性因數(shù)自學(xué)習(xí)激活判斷:當(dāng)實(shí)時(shí)穩(wěn)定性因數(shù)有效且當(dāng)前穩(wěn)定性因數(shù)[Kcur]與實(shí)時(shí)穩(wěn)定性因數(shù)[Kact]相差較大時(shí),激活穩(wěn)定性因數(shù)自學(xué)習(xí)算法。
3)穩(wěn)定性因數(shù)[Kcur]計(jì)算:根據(jù)1.3所述尋優(yōu)算法,計(jì)算車輛穩(wěn)定性因數(shù)。
3.2" 實(shí)車驗(yàn)證
以某車型穩(wěn)態(tài)繞圓工況(50~89ms)為例,穩(wěn)定性因數(shù)自學(xué)習(xí)結(jié)果如圖4所示。從圖4可以看出,初始穩(wěn)定性因數(shù)[Kcur=Kb=0.0015]。當(dāng)車輛激活穩(wěn)定性因數(shù)自學(xué)習(xí)策略后,穩(wěn)定性因數(shù)[Kcur]調(diào)整為0.00115。
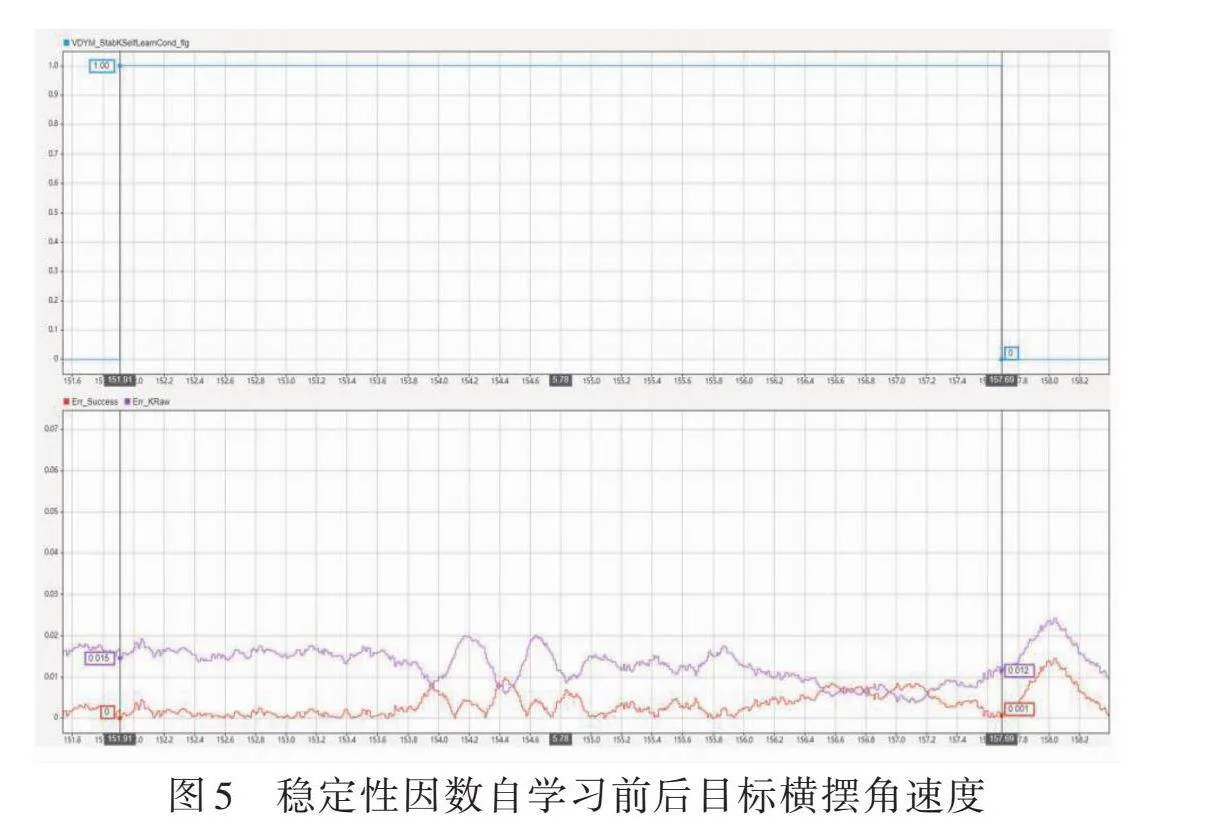
前文說過,穩(wěn)定性因數(shù)對(duì)目標(biāo)橫擺角速度的計(jì)算準(zhǔn)確性有關(guān)鍵性影響,圖5展示了穩(wěn)定性因數(shù)自學(xué)習(xí)前后目標(biāo)橫擺角速度計(jì)算的結(jié)果。
在圖5中,紫色表示穩(wěn)定性因數(shù)自學(xué)習(xí)前的目標(biāo)橫擺角速度與實(shí)際橫擺角速度的差值,紅色則為穩(wěn)定因數(shù)自學(xué)習(xí)后的目標(biāo)橫擺角速度與實(shí)際橫擺角速度的差值。從圖中能夠明顯看出,在穩(wěn)定性因數(shù)自學(xué)習(xí)后,目標(biāo)橫擺角速度與實(shí)際橫擺角速度的差值最大值從約0.025rad/s變更為0.01rad/s,這表明目標(biāo)橫擺角速度的精度得到了大幅提高。由此可以得出,自學(xué)習(xí)策略有效且準(zhǔn)確地對(duì)穩(wěn)定性因數(shù)進(jìn)行了修正。
4" 結(jié)論
總結(jié)前文內(nèi)容,本文運(yùn)用了穩(wěn)定性理論因數(shù)理論計(jì)算模型以及運(yùn)動(dòng)學(xué)模型,采用尋優(yōu)控制算法,設(shè)計(jì)出了穩(wěn)定性因數(shù)自學(xué)習(xí)控制策略。通過實(shí)車測(cè)試表明,該算法能夠有效提高目標(biāo)橫擺角速度的計(jì)算精度,進(jìn)而提升車輛的穩(wěn)定性和操縱性。
參考文獻(xiàn)
[1] 余志生. 汽車?yán)碚揫M].北京:機(jī)械工業(yè)出版社,2009.
[2] 李亮,宋健,于良耀,等.低附路面汽車動(dòng)力學(xué)穩(wěn)定性控制系統(tǒng)控制策略[J].機(jī)械工程學(xué)報(bào),2008,44(11):229-235.
[3] 安部正人.車輛操縱動(dòng)力學(xué)理論與應(yīng)用[M]. 北京:機(jī)械工業(yè)出版社,2016.
[4] 何元超,李亮,宋健,等.極限工況下汽車動(dòng)態(tài)穩(wěn)定性因數(shù)模型與分析[J].汽車安全與節(jié)能學(xué)報(bào),2010(4):320-328.
(編輯" 凌" 波)