車路協(xié)同系統(tǒng)發(fā)展現(xiàn)狀及其在智慧高速中的應用研究
2025-02-20 00:00:00張虎陳鴻睿陳真
科技創(chuàng)新與應用 2025年5期
摘" 要:該文綜述智慧高速車路協(xié)同發(fā)展現(xiàn)狀。結合國內(nèi)智慧高速車路協(xié)同試點建設情況,提出基于“車、路、云”的車路協(xié)同系統(tǒng)架構,并分析研究其關鍵技術、典型場景應用和設施構成等,可為后續(xù)高速公路車路協(xié)同系統(tǒng)建設提供參考。
關鍵詞:車路協(xié)同;自動駕駛;智慧高速;設施構成;關鍵技術
中圖分類號:U495" " " 文獻標志碼:A" " " " " 文章編號:2095-2945(2025)05-0189-04
Abstract: This paper summarizes the current development status of smart highway vehicle-road collaborative development. Combined with the domestic smart highway vehicle-road collaboration pilot construction, a vehicle-road collaboration system architecture based on \"vehicle, road, and cloud\" is proposed, and its key technologies, typical scenario applications and facility composition are analyzed and studied, which can provide reference for subsequent highway vehicle-road collaboration system construction.
Keywords: vehicle-road collaboration; autonomous driving; smart highway; facility composition; key technologies
智慧高速是指基于交通工程理論,構建以數(shù)據(jù)為核心的協(xié)同管控與創(chuàng)新服務體系[1]。利用“人的智慧思維+先進的技術手段+協(xié)同的運行機制+創(chuàng)新的模式”,實現(xiàn)全要素實時感知,全過程管控,全數(shù)字運營。伴隨式信息服務的高速公路。高速公路車道線、標示牌等靜態(tài)信息特征清晰、交通環(huán)境相對簡單、未來可能成為智能網(wǎng)聯(lián)汽車(ICV)技術優(yōu)先落地應用的場景之一[2]。車路協(xié)同系統(tǒng)是通過先進的無線通信和新一代互聯(lián)網(wǎng)技術,實現(xiàn)車與車、車與路、車與人及車與網(wǎng)絡的實時數(shù)據(jù)交互,對提升交通安全、提高通行效率、促進自動駕駛發(fā)展具有重要意義。
1" 智慧高速車路協(xié)同發(fā)展現(xiàn)狀
1.1" 政策支持
中國政府對智慧高速車路協(xié)同系統(tǒng)的發(fā)展給予了高度重視,并出臺了一系列相關政策來推動其發(fā)展。例如《新一代人工智能發(fā)展規(guī)劃》《交通強國建設綱要》《車聯(lián)網(wǎng)(智能網(wǎng)聯(lián)汽車)產(chǎn)業(yè)發(fā)展行動計劃》《國家車聯(lián)網(wǎng)產(chǎn)業(yè)標準體系建設指南(智能交通相關)》等文件將車路協(xié)同、自動駕駛作為重點發(fā)展領域,為車路協(xié)同技術的發(fā)展提供了戰(zhàn)略引領和政策支持。
1.2" 試點項目
交通運輸部著力推進車路協(xié)同試點工程建設,通過在路段沿線部署車聯(lián)網(wǎng)RSU等智能路側設施,與智能網(wǎng)聯(lián)車輛開展信息交互,協(xié)同提升交通運行效率,保障運行安全。目前已開展車路協(xié)同試點建設的項目包括杭紹甬智慧高速(浙江省)、延崇高速(北京市)、京雄高速(河北省)、機西智慧高速(河南省)和石渝高速公路(重慶市)等。
1.3" 試點應用場景
目前,高速公路主要開展的車路協(xié)同的應用場景主要如下。
車路協(xié)同安全預警:在分合流區(qū)、事故多發(fā)區(qū)域、易擁堵路段等區(qū)域配套建設智能路側設施,將交通異常事件提前推送給附近聯(lián)網(wǎng)車輛,提前告知前方路況,保障交通運行安全。
貨車編隊行駛:采用環(huán)境感知、V2V/V2I通信、高精度定位等多技術融合及管理辦法的技術路徑,實現(xiàn)3輛及以上貨車同時行進隊列,每輛車在行駛過程中自動保持車間距離,跟隨車輛實時同步完成所有動作,提高道路通行能力[3]。
全天候通行:在團霧、暴雨、結冰等惡劣氣象條件下,由智能路側設施感知前方交通狀況、路面狀態(tài)等信息,并通過邊緣計算向聯(lián)網(wǎng)車輛提供建議行車速度、行駛車道等誘導信息,協(xié)同保障車輛運行安全[4]。
2" 智慧高速車路協(xié)同系統(tǒng)架構
2.1" 總體建設思路
智慧高速車路協(xié)同系統(tǒng)是一個高度集成和智能化的系統(tǒng),總體建設思路如下。
2.1.1" 以服務公眾出行為核心
系統(tǒng)能夠實時感知交通狀況,精準預測交通流變化,為出行者提供最優(yōu)的路線規(guī)劃、實時路況信息、緊急事件預警等全方位服務。
2.1.2" 兼顧成本與成效
根據(jù)實際需求和技術成熟度分階段推進,在設備選型、系統(tǒng)部署、運維管理等各個環(huán)節(jié)中,注重成本效益分析,確保每一分投入都能帶來相應的回報。
2.1.3" 構建“車、路、云”三位一體的架構
通過這種三位一體的架構設計,實現(xiàn)車輛與道路、車輛與車輛之間的全面互聯(lián)和協(xié)同控制,提升交通系統(tǒng)的整體效能和安全性。
2.2" 系統(tǒng)體系架構
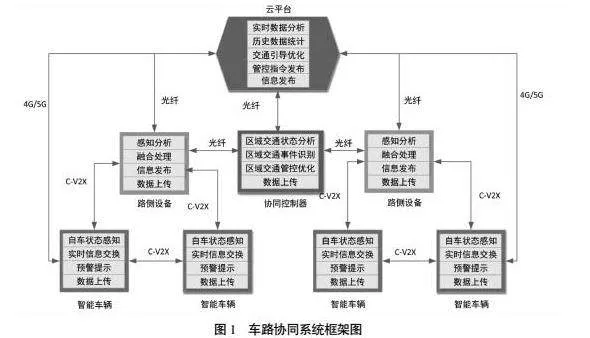
結合國內(nèi)已開展的智慧高速試點項目中車路協(xié)同系統(tǒng)建設情況,車路協(xié)同系統(tǒng)內(nèi)容包括“車、路、云”3個部分內(nèi)容構成,如圖1所示。
車端:包括智能網(wǎng)聯(lián)車輛或者安裝智能車載終端的普通車輛。這些車輛通過車載單元(如車載通信模塊、雷達、攝像頭等)實現(xiàn)與其他交通參與者及道路基礎設施的信息交互。車端設備通過C-V2X(蜂窩車聯(lián)網(wǎng))等無線通信技術,與路側基礎設施進行實時信息交換,實現(xiàn)協(xié)同感知、協(xié)同決策和協(xié)同控制。
路端:建設智能路側設施,包括感知設施、網(wǎng)絡基站、定位設施與邊緣計算設施等,負責感知交通異常情況,如道路擁堵、交通事故等,并聯(lián)網(wǎng)傳輸給智能車輛,保障自動駕駛車輛運行安全。
云端:建設云控中心,負責匯總各類數(shù)據(jù)(包括車端和路端采集的數(shù)據(jù)),進行分析研判,并生成誘導控制策略。這些策略通過通信網(wǎng)絡實時傳輸給車輛和路側設施,以提升整體通行效率。云控中心通過大數(shù)據(jù)分析和人工智能算法,對交通流量、事故預警、路況信息等進行深度挖掘和智能處理。同時,云控中心還可以與交通管理部門進行數(shù)據(jù)共享和協(xié)同工作,實現(xiàn)交通系統(tǒng)的全面優(yōu)化和智能化管理。
2.3" 關鍵技術
智慧高速車路協(xié)同系統(tǒng)涉及的關鍵技術可分為以下4種。
2.3.1" 融合感知技術
除智能網(wǎng)聯(lián)車輛自身配置的感知設備外,路段沿線配套建設智能路側感知設施,對自動駕駛可能存在的風險因素提前感知,主要感知設備包括視頻分析設備、目標跟蹤雷達設備等[5]。
2.3.2" 車路信息交互技術
主要通過在路側設置車聯(lián)網(wǎng)(C-V2X)基站和5G基站,與智能網(wǎng)聯(lián)車輛或其他車載智能終端建立直接的通信連接來實現(xiàn)。車路信息交互內(nèi)容主要包括路網(wǎng)基本信息、交通控制信息、交通事件信息等,同時可通過車載終端采集車輛速度、軌跡等信息[6]。
2.3.3" 高精度地圖與定位技術
車路協(xié)同系統(tǒng)作為統(tǒng)籌車、路、云三方信息的綜合性平臺,高精度地圖是必備的平臺載體。通過高精度地圖,平臺掌握了車與路的空間關系,便于開展管理決策;車輛獲取了前方道路信息,指導下一步駕駛行為。
高精度地圖包括靜態(tài)數(shù)據(jù)圖層和動態(tài)數(shù)據(jù)圖層,其中靜態(tài)數(shù)據(jù)包括道路數(shù)據(jù)、車道數(shù)據(jù)、道路設施數(shù)據(jù),用于支撐多數(shù)據(jù)融合、場景可視化等應用,是高精度地圖必須包含的數(shù)據(jù)內(nèi)容。動態(tài)數(shù)據(jù)圖層是指高精度地圖用以存儲實時動態(tài)數(shù)據(jù)的框架結構,包括交通流狀態(tài)、交通事件、道路氣象環(huán)境、道路交通設施狀態(tài)等數(shù)據(jù)[7]。
高精度定位技術主要用于為過往車輛提供車道級定位服務,具體依靠北斗導航系統(tǒng)及地面差分定位基站實現(xiàn)。
2.3.4" 智能計算平臺
負責對感知設備獲取的數(shù)據(jù)分析處理,根據(jù)事件類型,快速生成對應的控制策略,并將控制誘導信息通過路側基站推送至智能網(wǎng)聯(lián)車輛,保障車輛安全駕駛。
智能計算平臺一般采用云邊結合的技術架構,包括邊緣計算和中心計算兩部分組成,中心計算主要通過數(shù)據(jù)中心的智慧管控平臺完成,負責處理非緊急的日常信息和復雜的運算;邊緣計算主要由路側智能控制設備完成,負責處理高速公路主線突發(fā)的影響交通安全的緊急事件[8]。
3" 典型場景應用及設施構成
3.1" 典型場景應用
智慧高速車路協(xié)同擬開展的場景應用包括自動駕駛場景和車路協(xié)同駕駛輔助。
3.1.1" 自動駕駛場景
自動駕駛場景的服務對象是具備自動駕駛功能的智能網(wǎng)聯(lián)車輛,主要開展支持L3級以上自動駕駛和貨車編隊行駛。
1)支持L3級以上自動駕駛。自動駕駛等級不低于L3級的智能網(wǎng)聯(lián)車輛,車端搭載有車載傳感器、控制器、執(zhí)行器等裝置,具備環(huán)境感知、智能化決策與控制功能。
自動駕駛車輛在運行過程中可以獲取路側智能設施感知推送的信息,包括危險路段、前方事故、逆行車輛、低速車輛、異常停車、路面異常和團霧等惡劣氣象環(huán)境預警等安全預警信息,以及云控中心聯(lián)網(wǎng)推送的可變限速、推薦車道、分流建議和異常管制等管理誘導信息,協(xié)同保障自動駕駛車輛安全、高效運行。
2)貨車編隊行駛。編隊貨車應搭載車載傳感器、控制器、執(zhí)行器等裝置,具備環(huán)境感知、智能化決策與控制功能,自動駕駛級別應不低于L3級;貨車編隊應構建混合交通環(huán)境下貨車隊列協(xié)同控制模型,確保領航車輛、跟隨車輛編隊及普通車輛行駛安全。
路段和云控中心應基于路側設備、智能車載終端獲取的實時微觀混合交通流信息,通過邊緣計算設施,實現(xiàn)對貨車編隊軌跡、速度、跟馳距離等中觀顆粒度誘導,并在前方事故條件下,實時生成協(xié)同式編隊應急疏散策略。
3.1.2" 車路協(xié)同駕駛輔助
車路協(xié)同駕駛輔助的服務對象是包括具備自動駕駛功能的智能網(wǎng)聯(lián)車輛和加裝智能車載終端的普通車輛,主要開展安全預警、車路協(xié)同效率提升、駕駛行為糾正等場景應用。
1)安全預警。路側設施通過感知的信息和云中心下發(fā)的信息,利用自身的邊緣計算能力,產(chǎn)生安全預警信息,并通過路側基站發(fā)送到智能車載終端和其他路側信息發(fā)布設施。安全預警信息包括異常交通事件預警、異常天氣預警、道路遺撒提醒、擁堵提醒、施工區(qū)域預警、可變限速提醒、危險路段預警、異常車輛預警和合流區(qū)預警等場景。
2)車路協(xié)同效率提升。云控中心基于智能路側設施感知的實時交通流數(shù)據(jù),自動生成管理誘導策略,包括車道級限速、車道級誘導、車道路權控制和分流建議等,通過路側基站推送給智能車載終端和其他路側信息發(fā)布設施。
3)駕駛行為糾正。智能路側設施、智能車載單元可以實時獲知車輛的運行狀態(tài),包括行駛的速度、車道等信息,分析判斷當前車輛是否處于不良駕駛狀態(tài),并對司機進行實時提醒。具體場景包括超速提醒、違法占用應急車道提醒、疲勞駕駛提醒、長期占用超車道提醒和異常低速提醒等。
3.2" 主要設施構成
車路協(xié)同系統(tǒng)包括車端設施、智能路側設施、云控中心。
3.2.1" 車端設施
智能網(wǎng)聯(lián)車輛和智能車載終端一般配置具有以下功能模塊。
1)道路視覺感知設施。一般采用高分辨率的攝像機,部署于車輛前后左右全向,對車輛周邊動態(tài)目標三維立體感知,并探測距離,識別如路面標志標牌、錐形筒等障礙物及施工區(qū)域,拓展智能駕駛功能邊界。
2)目標跟蹤雷達。常用技術設備為激光雷達和毫米波雷達2種,主要目的是對周圍運動目標檢測和跟蹤、障礙物檢測、危險盲區(qū)預估等,在夜間、能見度較低的情況下可作為視頻感知設施的有機補充。
3)車聯(lián)網(wǎng)通信模塊。一般包括5G Uu通信接口和PC5通信接口,具備與云端和路端同步通信的能力。
4)軌跡預測與場景理解。對車輛、非機動車和行人等道路參與者的行為意圖和運動軌跡開展預測,使得車輛能夠充分利用不確定性信息,解決車輛、非機動車、行人突發(fā)橫穿場景。
5)高精度地圖與定位。基于多傳感器融合技術,實現(xiàn)高精度三維地圖構建,支持點云層、定位層、語義層以及導航層等多種圖層,并基于高精度地圖提供在線實時高精度定位。
6)決策規(guī)劃與控制(具備自動駕駛功能的車輛配置)。綜合車輛當前行駛狀態(tài)、環(huán)境等信息,在不同場景下實施安全、智能、舒適的決策規(guī)劃,以及實現(xiàn)精準的車輛控制功能。
3.2.2" 智能路側設施
智能路側設施包括感知設施、網(wǎng)絡基站、定位設施和邊緣計算設施等。
1)感知設施。主要包括AI視頻分析攝像機和目標跟蹤雷達。AI視頻分析攝像機通過對視頻圖像分析的方式,分析判斷當前場景的交通運行環(huán)境,識別交通異常事件。根據(jù)自動駕駛的功能定位,需實現(xiàn)試點范圍內(nèi)連續(xù)監(jiān)測覆蓋,考慮到視頻分析精度因素,推薦以100 m為間距,在路段雙側連續(xù)布置。
目標跟蹤雷達用于配合視頻設備監(jiān)測路段異常事件,推薦采用毫米波雷達,建議設置間距為200 m,在路段雙側連續(xù)布設。
2)網(wǎng)絡基站。結合當前技術發(fā)展情況,路側設置的基站應包括5G基站和車聯(lián)網(wǎng)(C-V2X)基站。5G基站與車輛以點對點的模式聯(lián)網(wǎng),實施雙向數(shù)據(jù)通信,具體數(shù)據(jù)內(nèi)容包括OTA系統(tǒng)升級、高精度地圖下載、導航、遠程駕駛、車輛信息回傳和車機娛樂等大帶寬內(nèi)容。5G基站推薦布設間距為600 m,單側部署。
C-V2X基站以廣播的模式對通行車輛實施通信,具體數(shù)據(jù)內(nèi)容包括高精度地圖圖層、高精度定位差分校正值、交通誘導與控制策略、安全和效率類預警提示等低時延內(nèi)容。C-V2X基站推薦布設間距為400 m,單側部署。
3)定位設施。路側通過設置北斗地面差分定位基站為通行車輛提供定位校正,實現(xiàn)車道級高精度定位。北斗地面差分定位基站覆蓋范圍為30 km,擬選取路面結構穩(wěn)定位置設置1處。
4)邊緣計算設施。邊緣計算設施為路側設施提供快速分析運算能力,并將信息推送給C-V2X基站再發(fā)布給過往車輛。建議邊緣計算設施與C-V2X基站同址布設。
3.2.3" 云控中心
車路協(xié)同系統(tǒng)采用邊云結合的技術架構,即路側部署終端,在云控中心部署中心服務系統(tǒng)。系統(tǒng)通過與路側終端管理系統(tǒng)對接,實時獲取車輛運行信息和設備狀態(tài)信息、進一步支撐交通狀態(tài)分析、遠程控制等各項功能,實現(xiàn)區(qū)域管控智能化、網(wǎng)聯(lián)化、精細化。
云控中心主要建設內(nèi)容包括中心服務器、核心交換機、磁盤陣列、網(wǎng)絡安全設施和平臺軟件等。
4" 當前發(fā)展問題與未來展望
在當前階段,基于車路協(xié)同的自動駕駛尚未完全成熟,大量的相關規(guī)范還在編制過程中。根據(jù)國內(nèi)已開展的相關試點工程情況,智能車輛與路側設施完全協(xié)同運行尚存在許多問題,不同廠商之間設施存在兼容性差的情況,預期的建設效果存在一定實施風險。
但從技術發(fā)展趨勢來看,隨著5G車聯(lián)網(wǎng)、人工智能、邊緣計算等技術的更新迭代,行業(yè)標準規(guī)范的不斷完善,以及相關法律規(guī)章制度的建立健全,基于車路協(xié)同技術的自動駕駛終將得以實現(xiàn)。
5" 結束語
智慧高速車路協(xié)同系統(tǒng)是未來交通發(fā)展的重要方向,通過先進的無線通信和新一代互聯(lián)網(wǎng)技術,實現(xiàn)車與車、車與路、車與網(wǎng)絡的實時數(shù)據(jù)交互,從而提升交通安全,提高通行效率,促進自動駕駛發(fā)展。盡管當前技術和標準尚不完善,但隨著5G車聯(lián)網(wǎng)、人工智能、邊緣計算等技術的不斷進步,車路協(xié)同技術將在智慧高速中得到廣泛應用并最終實現(xiàn)自動駕駛的目標。
參考文獻:
[1] 智慧高速公路建設指南(暫行):ZJ/ZN 2020-01[S].浙江省交通運輸廳,2020.
[2] 岑晏青,宋向輝,王東柱,等.智慧高速公路技術體系構建[J].公路交通科技,2020,37(7):111-121.
[3] 王昊,吳勇.基于5G-V2X技術的智慧交通車載路側設備研究與應用[J].內(nèi)燃機與配件,2021(20):205-206.
[4] MIGUEL C, JO?魨O A, PAULO C B,et al. Multipurpose sensing platform for improved road safety[C]//IEEC Consumer Communications and Networking Conference,2022:1-7.
[5] 岑晏青,宋向輝,王東柱,等.智慧高速公路技術體系構建[J].公路交通科技,2020,37(7):111-121.
[6] 張毅,姚丹亞,李力,等.智能車路協(xié)同系統(tǒng)關鍵技術與應用[J].交通運輸系統(tǒng)工程與信息,2021,21(5):40-51.
[7] 李智,張江,仲躋沖,等.高精度地圖在車路協(xié)同系統(tǒng)中的統(tǒng)一化應用探索[J].中國交通信息化,2021(1):94-97.
[8] 丁飛,張楠,李升波,等.智能網(wǎng)聯(lián)車路云協(xié)同系統(tǒng)架構與關鍵技術研究綜述[J].自動化學報,2022,48(12):2863-2885.