基于單片機(jī)的船舶設(shè)備信號(hào)采集及處理系統(tǒng)
2007-01-28 08:05:34,
船海工程 2007年6期
,
(武漢理工大學(xué) 能源與動(dòng)力工程學(xué)院,武漢 430063)
隨著計(jì)算機(jī)技術(shù)的發(fā)展、船舶自動(dòng)化程度的提高,船載儀表系統(tǒng)也由過(guò)去的機(jī)械儀表向電子式儀表(EFIS)發(fā)展。但現(xiàn)在還在使用期的早期建造的船舶大部分是采用模擬信號(hào)設(shè)備;有些設(shè)備雖然采用了數(shù)字信號(hào),但也沒(méi)有統(tǒng)一的標(biāo)準(zhǔn)。為提高這些早期船舶的自動(dòng)化程度,需要解決模擬信號(hào)數(shù)字化以及信號(hào)標(biāo)準(zhǔn)統(tǒng)一的問(wèn)題。國(guó)內(nèi)開(kāi)發(fā)了ZSZ系列自整角機(jī)/數(shù)字轉(zhuǎn)換模塊,ZSZ系列轉(zhuǎn)換器是一種采用跟蹤技術(shù)和模塊化結(jié)構(gòu)的自整角機(jī)/數(shù)字轉(zhuǎn)換器,它采用二階伺服回路,輸出與TTL電平兼容的并行二進(jìn)制碼,與美國(guó)AD公司的ADC1700系列轉(zhuǎn)換器完全兼容。
但是,這些接口只能采集轉(zhuǎn)換一路信號(hào)或一種信號(hào),并且輸出信號(hào)的通訊格式不是標(biāo)準(zhǔn)的NMEA-0183格式信號(hào)(即ASCⅡ碼)。據(jù)此,筆者選擇船舶上應(yīng)用比較廣泛、比較重要的步進(jìn)電機(jī)信號(hào)和自整角機(jī)信號(hào)作為對(duì)象,以AT89C51單片機(jī)為核心芯片,設(shè)計(jì)一款采集和處理這兩種信號(hào)的多路轉(zhuǎn)換接口。
1 硬件設(shè)計(jì)
系統(tǒng)硬件原理框圖見(jiàn)圖1。
由自整角機(jī)信號(hào)和步進(jìn)信號(hào)的前置電路、8路采樣和保持器、多路轉(zhuǎn)換開(kāi)關(guān)、12位AD574逐位直流到數(shù)字轉(zhuǎn)換器、單片機(jī)AT89C52等組成多路信號(hào)采集與處理系統(tǒng)。自整角機(jī)、步進(jìn)電機(jī)的信號(hào)經(jīng)過(guò)各自前置處理電路后,送入單片機(jī)系統(tǒng)進(jìn)行數(shù)據(jù)的實(shí)時(shí)處理,然后經(jīng)串口向外輸出符合NMEA-0183或者IEC-61162格式的標(biāo)準(zhǔn)信號(hào)。
1.1 自整角機(jī)信號(hào)處理
自整角機(jī)各路信號(hào)經(jīng)同步采樣保持后,由單片機(jī)89C51控制多路轉(zhuǎn)換開(kāi)關(guān)選擇通道和啟動(dòng)AD574;信號(hào)經(jīng)12位AD574逐位直流到數(shù)字轉(zhuǎn)換器,轉(zhuǎn)換成12位數(shù)字量。12位數(shù)據(jù)分兩個(gè)8位送出,先送高8位,后送低4位。
自整角機(jī)信號(hào)處理由信號(hào)比較和信號(hào)整形兩部分組成,對(duì)自整角同步發(fā)送機(jī)送出的模擬信號(hào)進(jìn)行衰減、鑒零、鑒相、整形處理。信號(hào)處理部分最重要的是自整角機(jī)機(jī)械角到數(shù)字角的轉(zhuǎn)換。
自整角機(jī)必須經(jīng)過(guò)正余弦變壓器,把輸入的信號(hào)轉(zhuǎn)換為正余弦旋轉(zhuǎn)變壓器輸出方式,同時(shí)使輸出的正弦和余弦電壓限制在10 V左右[1]。目前多采用電子式正余弦變壓器。圖2為自整角機(jī)輸入的正余弦變壓器。
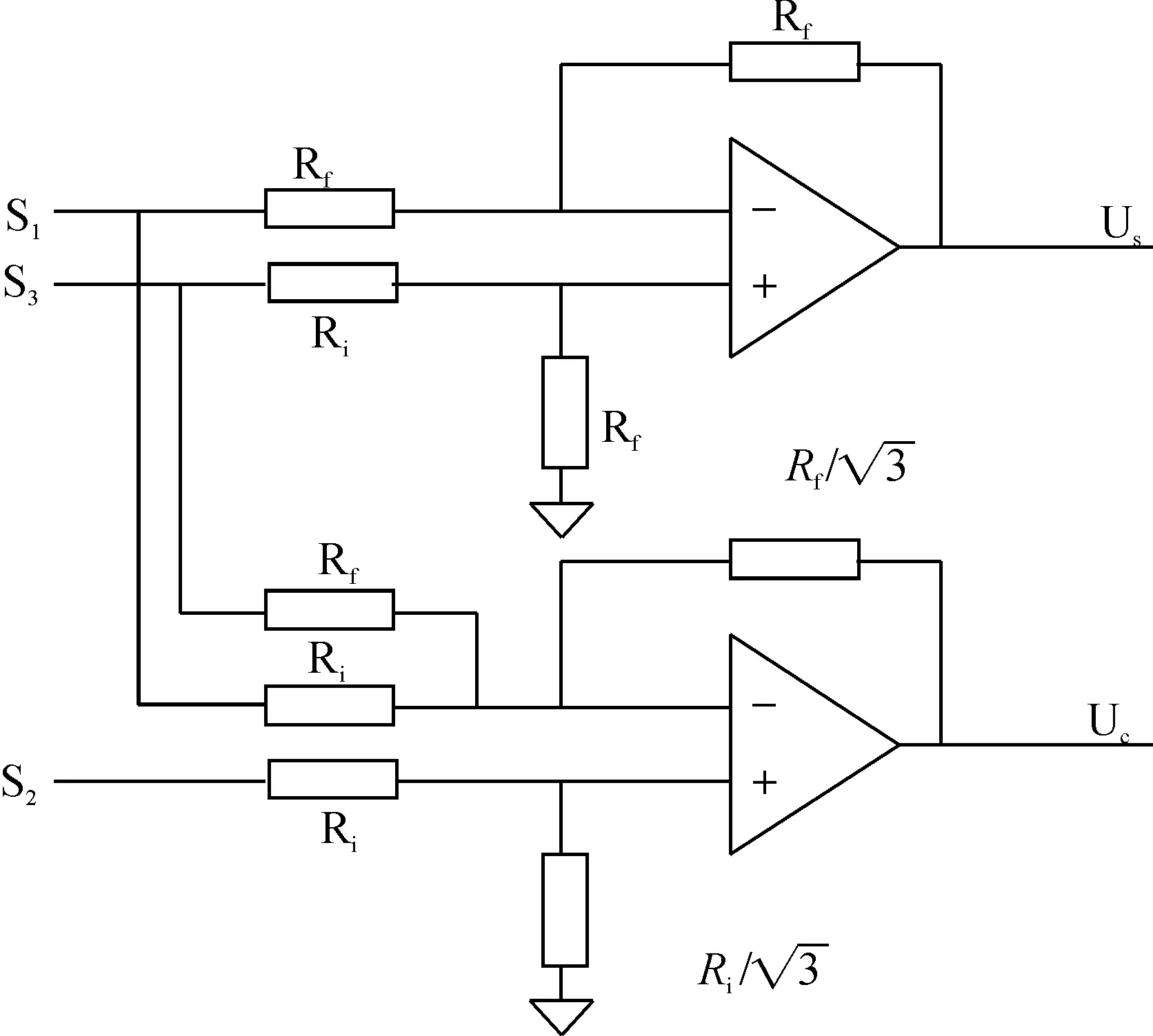
圖2 正余弦信號(hào)生成電
電子式正余弦變壓器的兩路輸出為:
(1)
(2)
式中:Us——正弦輸出電壓;
Uc——余弦輸出電壓;
Um——輸入正弦、余弦繞組電壓最大值;
ω——輸出信號(hào)的載波頻率,即激磁電壓的角頻率;
θ——轉(zhuǎn)動(dòng)的機(jī)械角度;
Ri——輸入電阻;
Rf——反饋電阻;
K——比例系數(shù)。
正余弦變壓器輸出的信號(hào)是以模擬信號(hào)表示的機(jī)械軸角θ,在數(shù)字隨動(dòng)系統(tǒng)中,需要將機(jī)軸角θ轉(zhuǎn)換成數(shù)字角φ。
由式(1)、(2)可以推出:
(3)
(4)
信號(hào)Us,Uc在峰值區(qū)間進(jìn)行同步采樣和保持,經(jīng)A/D轉(zhuǎn)換器后變成與電壓成正比的量,由式(4)進(jìn)行反正切運(yùn)算,即可解算出數(shù)字角φ[2]。
1.2 步進(jìn)電機(jī)信號(hào)處理
步進(jìn)電機(jī)在船舶上應(yīng)用廣泛,其中步進(jìn)式分羅經(jīng)就是典型的例子,其功能就是將脈沖信號(hào)變換為相應(yīng)的角位移,即有一個(gè)脈沖信號(hào),電機(jī)轉(zhuǎn)一個(gè)角度。分羅經(jīng)中通常使用的步進(jìn)電機(jī)是每來(lái)一個(gè)脈沖,轉(zhuǎn)子旋轉(zhuǎn)30°,對(duì)應(yīng)的分羅經(jīng)刻度盤的刻度為1/6°,機(jī)分羅經(jīng)轉(zhuǎn)子與分羅經(jīng)刻度盤的齒輪傳動(dòng)比是180∶1,在1°的航向變化中步進(jìn)電機(jī)S1、S2、S3三個(gè)繞組分別為S1、S1S2、S2、S2S3、S3、S3S1呈周期變化,每一步為1/6°,在1°之內(nèi)步進(jìn)輸出的三個(gè)導(dǎo)線上S1、S2、S3電壓信號(hào)已經(jīng)是脈沖編碼了。據(jù)此可列真值表1的信號(hào)代碼。
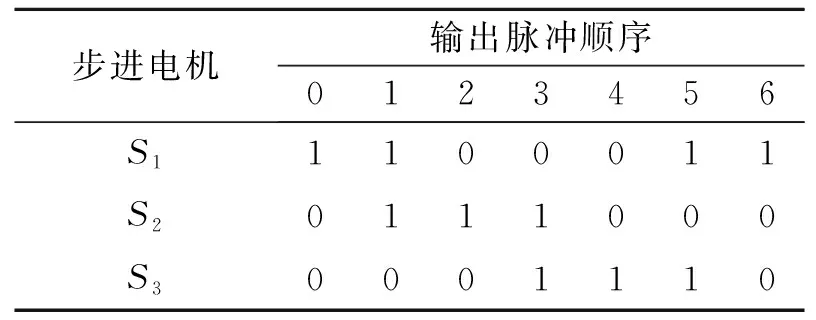
表1 葛雷碼真值表
表中:“1”代表高電平(35 V或者70 V),每個(gè)“1”相當(dāng)于1/6°的航向變化,6個(gè)“1”為1°航向變化,相當(dāng)于轉(zhuǎn)子旋轉(zhuǎn)360°。
由表1可知,每?jī)蓚€(gè)相鄰的代碼之間,只有一位數(shù)是不同的。這正好是3位6進(jìn)制循環(huán)碼(或稱為葛雷碼),與普通的3位8進(jìn)制葛雷碼相比,這里缺少“000”和“111”兩個(gè)代碼,由真值表1還可以看出,每條輸出線均在相鄰的三個(gè)代碼中為高電平,三個(gè)相鄰代碼為低電平。
在實(shí)際電路中,要考慮電平問(wèn)題。步進(jìn)式羅經(jīng)中,三相電路的輸出電平通常是35 V或者70 V。在輸入單片機(jī)中時(shí),需要的是TTL電平,即5 V電平。因此需要將35 V和70 V電壓降到5 V,并且考慮噪聲隔離,采用光敏元件作為開(kāi)關(guān)元件。經(jīng)過(guò)降壓處理得到TTL電平信號(hào)后,該信號(hào)由8212鎖存器鎖存,供單片機(jī)讀取。
1.3 單片機(jī)串口輸出設(shè)計(jì)
單片機(jī)89C51主要完成多路轉(zhuǎn)換開(kāi)關(guān)選擇、數(shù)據(jù)采集、信號(hào)格式轉(zhuǎn)換和信號(hào)輸出等功能。它的外圍電路主要有時(shí)鐘電路和復(fù)位電路以及串口輸出轉(zhuǎn)換電路。89C51讀取自整角機(jī)或者步進(jìn)電機(jī)信號(hào)后,對(duì)信號(hào)進(jìn)行數(shù)據(jù)處理。對(duì)自整角機(jī)信號(hào)根據(jù)反正切運(yùn)算,查表求得自整角機(jī)角度數(shù)字信號(hào);對(duì)步進(jìn)式羅經(jīng)信號(hào),查葛雷碼真值表,得到1°以內(nèi)的航向變化量,根據(jù)航向的增減,由原航向加或減該航向的變化量得到實(shí)時(shí)航向。
不論是自整角機(jī)信號(hào)還是步進(jìn)式羅經(jīng)信號(hào),只要有信號(hào)變化,單片機(jī)就將變化后的信號(hào)轉(zhuǎn)換為標(biāo)準(zhǔn)的NMEA-0183格式信號(hào),送單片機(jī)串口輸出。串口輸出的通訊協(xié)議標(biāo)準(zhǔn)主要有RS-232C和RS-485,可以分別采用MAX232和MAX483來(lái)實(shí)現(xiàn)RS-232C和RS-485的接口電路,滿足不同工作場(chǎng)合的需要。
2 軟件設(shè)計(jì)
系統(tǒng)主程序是一個(gè)無(wú)限循環(huán)程序,不斷查詢是否有步進(jìn)電機(jī)信號(hào)請(qǐng)求采集的信號(hào)和自整角機(jī)位置信號(hào)。當(dāng)有信號(hào)時(shí),調(diào)用相應(yīng)處理程序進(jìn)行處理,由串口輸出標(biāo)準(zhǔn)的NMEA-0183格式信號(hào)。
2.1 自整角機(jī)信號(hào)數(shù)字化程序設(shè)計(jì)
自整角機(jī)位置信號(hào)數(shù)字化的軟件工作流程為:完成對(duì)單片機(jī)的初始化;多次進(jìn)行A/D輸入端短路時(shí)的A/D轉(zhuǎn)換,取它們的平均值作為A/D輸入端的零位偏差,供主程序校正;確定分區(qū),計(jì)算K;查表,由K值查到θ的值;將θ值保存在一個(gè)約定好的存儲(chǔ)區(qū)中。然后按照NEMA-0183格式把信號(hào)傳送到單片機(jī)的串口供傳輸。見(jiàn)圖3。
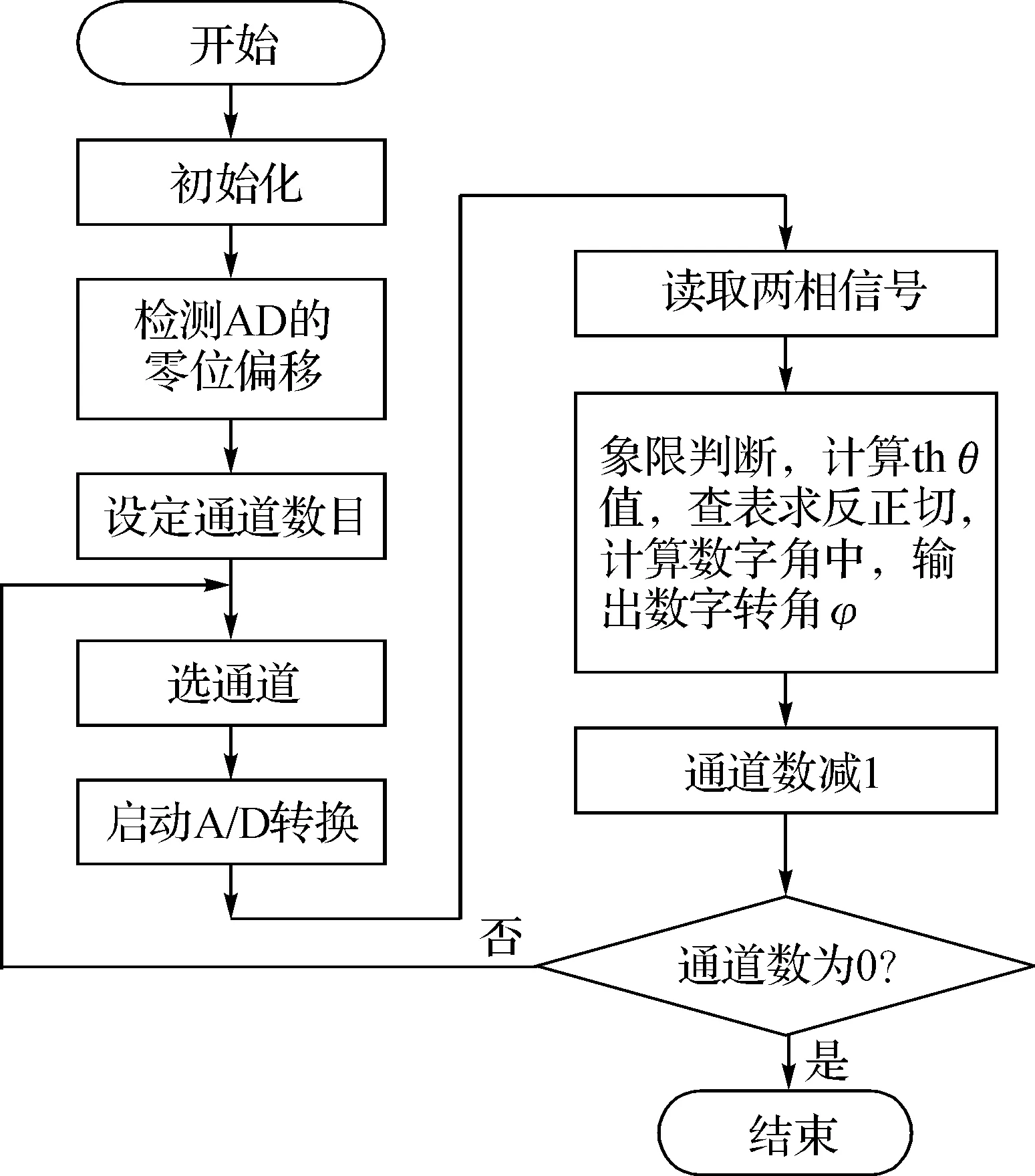
圖3 自整角機(jī)位置信號(hào)處理流程
2.2 步進(jìn)電機(jī)信號(hào)數(shù)字化程序設(shè)計(jì)
羅經(jīng)接口提供了格雷碼變化的信息后,軟件的任務(wù)就是將這種變化轉(zhuǎn)換為相對(duì)航向信號(hào),此航向信號(hào)以兩字節(jié)二進(jìn)制數(shù)表示,單位為1/6°。當(dāng)相對(duì)航向在零度附近擺動(dòng)時(shí),程序要能給出正確的示值。見(jiàn)圖4。
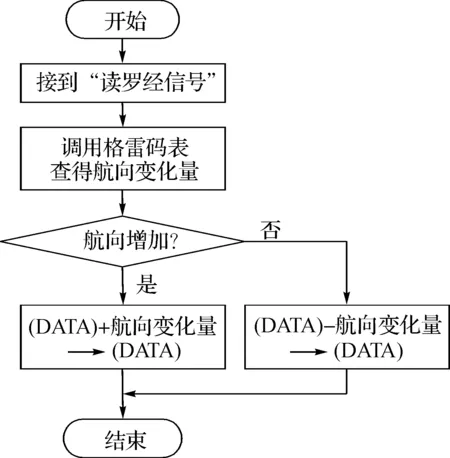
圖4 步進(jìn)電機(jī)位置信號(hào)處理流程
2.3 0183格式輸出
NMEA-0183標(biāo)準(zhǔn)中對(duì)不同的發(fā)送設(shè)備定義了不同的TALKER ID。TALKER ID為兩個(gè)字符,共計(jì)35個(gè)。同時(shí)定義了上百個(gè)數(shù)據(jù)形式代碼,每個(gè)代碼3個(gè)字符。數(shù)據(jù)串必須是79個(gè)字符或更少。字符采用美國(guó)國(guó)家標(biāo)準(zhǔn)ASCLL碼[3]。例如步進(jìn)式電羅經(jīng)的信號(hào)格式為:$HEHDT, x.x, T *hh〈CR〉〈LF〉,部分串口通訊顯示見(jiàn)圖5。
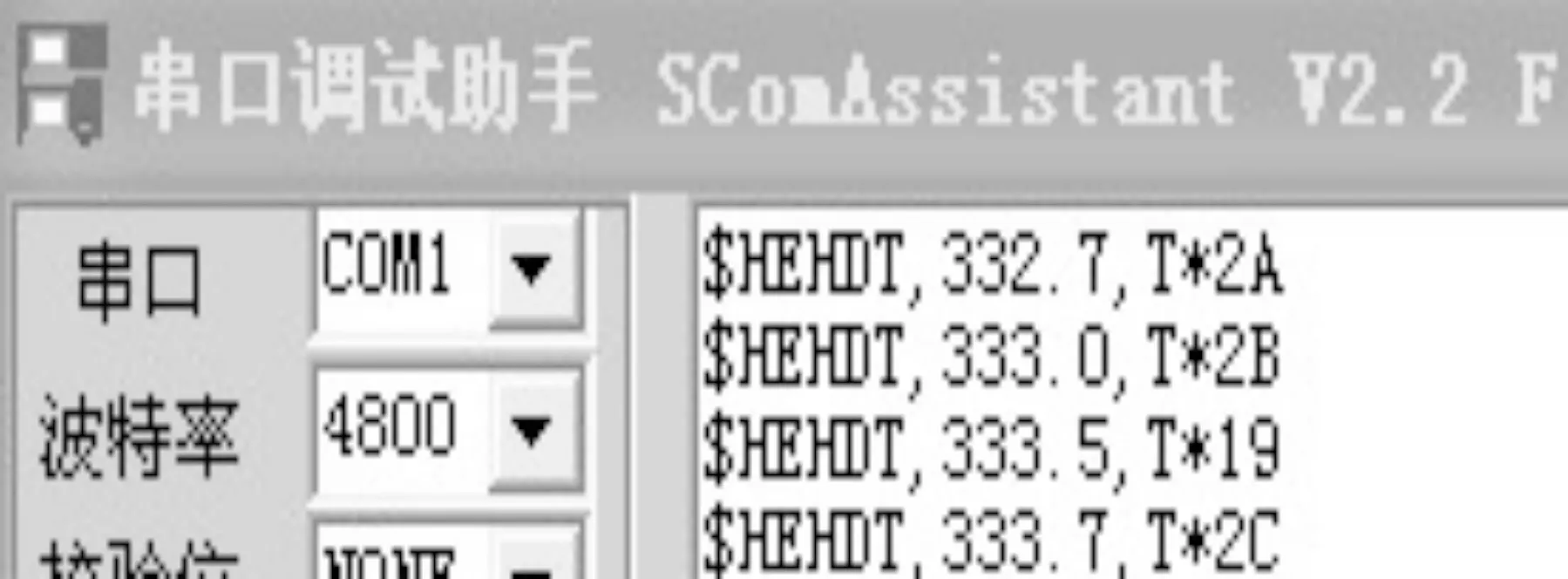
$-數(shù)據(jù)串開(kāi)始;HE-電羅經(jīng);HDT-真航向;,-數(shù)據(jù)區(qū)定界符;332.7-度數(shù);T-True;*-校驗(yàn)和識(shí)別碼;2A-校驗(yàn)和;〈CR〉〈LF〉-數(shù)據(jù)結(jié)束回車換行。圖5 步進(jìn)式電羅經(jīng)串口通訊
3 結(jié)束語(yǔ)
本設(shè)計(jì)以單片機(jī)作為信號(hào)采集與處理核心,根據(jù)自整角機(jī)信號(hào)和步進(jìn)電機(jī)信號(hào)不同的特點(diǎn)分別設(shè)計(jì)了不同的采集和處理電路。經(jīng)過(guò)本系統(tǒng)處理后,不論自整角機(jī)信號(hào)(模擬信號(hào))還是步進(jìn)電機(jī)信號(hào)(數(shù)字信號(hào)),都輸出符合NMEA-0183格式標(biāo)準(zhǔn)的RS-232電平信號(hào),由此解決了船舶設(shè)備通訊時(shí)的信號(hào)不一致問(wèn)題,提高了船舶的自動(dòng)化程度,適應(yīng)了現(xiàn)代航海設(shè)備的要求。
[1] 胡 皓,董辰光.自整角機(jī)/數(shù)字轉(zhuǎn)換器及其外圍電路設(shè)計(jì)[J].測(cè)控技術(shù),2005,24(5):90-91.
[2] 高文政.一種軸角到數(shù)字轉(zhuǎn)換器的設(shè)計(jì)[J].情報(bào)指揮控制系統(tǒng)與仿真技術(shù),2002(11):59-62.
[3] NMEA-0183 V2.20 Standard For Interfacing Marine Electronic Devices[S].National Marine Electronics Association, 1997.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
中國(guó)生殖健康(2019年3期)2019-02-01 06:12:26
電子制作(2018年12期)2018-08-01 00:48:04
電子制作(2017年19期)2017-02-02 07:08:27
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25
海軍航空大學(xué)學(xué)報(bào)(2015年3期)2015-11-11 17:20:00