基于CS5530的動態稱重系統設計
2009-01-06 04:55:38楊丙根
數字技術與應用 2009年11期
關鍵詞:數據采集
楊丙根

[摘要]本文介紹了一種基于CS5530的動態稱重控制系統,重點介紹了CS5530的性能、動態稱重對數據采集的要求、系統的設計方案,給出了硬件原理框圖及軟件實現流程圖,系統經過了實踐證明是可行的,有非常好的性價比。
[關鍵詞]CS5530 線性度 數據采集 動態稱重
[中圖分類號]TP391[文獻標識碼]A[文章編號]1007-9416(2009)11-0007-02
1 引言
動態稱重系統是應用于動態電子秤的控制系統,對工作物料進行快速稱重計量和精確實時控制。廣泛應用于糧食、化工、冶金、建材等行業生產現場的稱重計量和控制。
動態稱重控制系統的性能直接影響到動態電子秤的精度、速度,對保證企業的產品質量和提高生產效率有關鍵的影響,而系統的工作現場較為惡劣,且由于物料的不同、生產要求也有很大的不同,其精度要求可能是千克,也有可能是百分之一克,同時為提高生產效率又要求系統在保證精度的前提下,盡可能地提高稱重速度,這對控制系統的提出了很高的要求,因此設計一個符合要求的、有較高性價比的數據采集系統顯得非常關鍵。
2 CS5530 數據采集芯片簡介
CS5530是Cirrus Logic公司推出的低成本、24位△-∑模數轉換器,它具有較強的價格優勢,擁有可與CS553X系列其他產品相媲美的低噪聲性能和靈活的輸出字符率。憑借其低噪聲儀器放大器、24位分辨率等先進性能,CS5530成為稱重系統、低成本溫度控制器、數字面板式儀表和工藝控制模塊等科學測量應用的理想選擇。
CS5530是高集成度的△-∑模數轉換器,擁有一個差分輸入通道和固定增益可達64 x的高性能的斬波穩零儀表放大器,內部有一個4階△-∑調制器,其后跟著一個數字濾波器,具有較好的噪聲抑制能力,線性誤差達%FS,可測量單/雙極小信號,可分辨最小輸入信號的電壓為12nV。
在主時鐘頻率在4.9152MHz振蕩器的情況下,CS5530可提供最高可達3.84KHz SPS的輸出字速率,并根據需要進行調節。
為了方便與微處理器之間的通訊,CS5530提供了一個與SPI和Microwire兼容的3線制串行接口。
3 動態稱重控制系統的硬件設計
為滿足動態稱重要求精度高、速度快的要求,同時根據國內工業控制領域的特殊性,需要提供盡可能多的控制通道、控制信號以及能根據需要隨時改變控制信號功能。筆者設計了一個能實現多個通道數據采集、可擴展的動態稱重控制系統,該系統將數據采集制作成獨立的模塊,利用插卡的方式與微處理器進行數據通訊,這樣就可以根據需要擴展通道(插一塊卡就可以增加1個通道),另外采用ARM7微處理器,利用其強大的數據處理能力,可以最多處理16個通道的數據采集和實時控制,并能夠實現對每個通道的控制功能進行編程更改,以滿足用戶的不同工作要求。
多通道、可擴展動態稱重控制系統的硬件組成原理框圖如圖1所示。
3.1 數據采集卡
數據采集卡可根據需要設計若干路,每一路采集來自傳感器的信號,設計中傳感器采用壓電式傳感器,將重量轉換為電信號,由于壓電式傳感器具有體積小、輸出線性好、成本低等優點,可廣泛應用于各種稱重控制的工業生產現場。
采集卡電路由A/D(CS5530)和信號前置處理兩部分,前置部分完成對傳感器輸入信號的濾波、共模抑制及隔離等處理,其處理結果可為CS5530提供穩定、可靠的共模信號,CS5530將信號轉換為24位的數字信號,其轉換速率可根據現場需要進行調節。
3.2 H8S單片機系統
H8S單片機系統是本系統的核心,主要有H8S系列單片機、鐵電存儲器等部分組成,H8S系列單片機由瑞薩公司出品,具有速度快、數據處理能力強、位控功能好等特點,是一款適合于復雜工業控制系統要求的性價比較優的單片機;其16位的數據處理較常符合重量數據要求精度高、速度快的處理要求。大容量的內嵌RAM和Flash使得系統無須外擴數據存儲設備即可滿足系統的設計要求。鐵電存儲器主要用于存放重要的工作參數和各種工作統計數據,鐵電存儲器具有讀寫速度快、讀寫次數無限、可永久存儲等優點,可廣泛應用于需要永久存儲的場合。
3.3 輸入/輸出控制電路
輸入/輸出控制電路共有1 2路的輸入信號和12路輸出信號,為保證輸入信號可靠及減少外界對本系統電路的影響,利用光耦隔離外界與系統,輸出部分為了保證驅動工作現場的大功率工作設備,設計了大功率的放大電路,可提供最大可達1A的電流輸出。許多電氣設備(如電磁閥)可直接接入本系統而無須中間加接繼電器,這樣可大幅度提供系統控制的工作速度。
4 系統的軟件設計
多通道、可擴展的動態稱重系統是個較為復雜的系統,具有較多的功能,包括重量數據的采集及處理、顯示及鍵盤處理、參數設置、不同工作模式的控制流程處理、輸入/輸出功能編程處理等。這些功能的實現主要由軟件完成,H8S單片機是瑞薩公司提供的產品,其系列中既有低端的8位、16位微處理器,也有內核為ARM的高端微處理芯片,瑞薩公司也提供了HEW集成開發環境。本系統就是在HEW環境中開發成功的。
由于本系統較為復雜,本文只介紹系統主流程、重量數據的采集及處理、不同工作模式的控制流程處理等三個模塊。
4.1 系統主流程
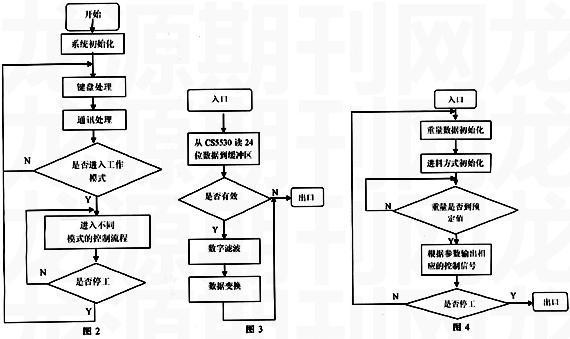
系統主流程包括系統初始化、鍵盤輸入處理、通訊處理及根據輸入信號確定是否進入稱重控制模式。其中系統初始化包括存儲器初始化、顯示器初始化、工作參數初始化、輸入/輸出初始化、定時器初始化、通訊初始化、CS5530初始化等模塊;鍵盤輸入處理完成對參數設置、去皮等功能操作;通訊處理完成為通訊要求準備數據。而顯示器的處理、鍵盤的讀入、A/D數據的采集、通訊等功能將在不同的中斷中實現。
系統主流程程序流程圖如圖2所示。
4.2 重量數據采集及處理程序
重量數據采集及處理程序主要完成將采集到的A/D數據存放到緩沖區中,并進行數字濾波、數據變換及形成顯示緩沖區等處理。其中數字濾波子程序采用加權移動中值濾波算法,以去掉偶然因素引起的波動和消除尖脈沖干擾;數據變換子程序將經過濾波處理后的A/D數據轉換為重量數據。
每一通道的重量數據采集及處理程序流程圖如圖3所示。
4.3 控制流程處理程序
控制流程處理程序主要完成對轉換后得到的重量數據進行處理比較,并根據不同的工作模式將重量數據和設定的參數進行比較,根據比較結果和預先設定的控制流程完成對秤體的控制,以完成各種不同的工作流程。
為了滿足不同秤體、不同工作現場的工作需要,本設計提供了一個可以根據用戶需要更改輸入/輸出功能的設置程序,這樣用戶就可以根據自己的要求來設置輸入/輸出口的功能,以完成相應的工作流程。
每一通道的控制流程處理程序的流程圖如4圖所示。
5 結語
隨著我國工業化程度的推進,工業現代化進程將進一步加快,工業產品將從粗放型逐步走向精細型。在這樣的大背景下,動態稱重系統將得到廣泛應用。而計算機技術的發展,高性能的微計算機正成為工業控制領域的主力軍,嵌入式技術的應用更使工業控制產品進入一個全新的領域。筆者設計的多通道、可擴展的動態稱重控制系統利用了嵌入式的概念,使得重量數據采集系統成為一個獨立的模塊,這樣可使得硬件設計可以逐步趨向標準化,而軟件功能的可編程化,使得系統在應用過程中可以根據需要來改變其控制流程和功能。
筆者設計的多通道、可擴展的動態稱重控制系統功能強大、性能優越、并且成本較低,達到了智能化、可擴展化、實用化的設計要求,實踐證明,該系統是可行的、可靠的,具有很好的應用和發展前景。
[參考文獻]
[1] 李芙英,王衛丹.H8S/2655系列16位單片機 清華大學出版社,2000.
[2] [日]伊落崧,橋本三男.微計算機在控制中的實用技術,1987.
[3] www.cirrus.com.
猜你喜歡
現代電子技術(2016年22期)2016-12-26 12:36:15
電子技術與軟件工程(2016年22期)2016-12-26 11:11:30
現代電子技術(2016年22期)2016-12-26 09:44:35
電子技術與軟件工程(2016年19期)2016-12-19 19:59:14
電腦知識與技術(2016年27期)2016-12-15 20:42:01
農業與技術(2016年15期)2016-11-09 17:43:03
科技視界(2016年18期)2016-11-03 22:51:40
中國科技博覽(2016年22期)2016-11-01 16:58:26
軟件工程(2016年8期)2016-10-25 15:54:18
軟件工程(2016年8期)2016-10-25 15:52:53
