基于機器視覺的車道線智能識別系統(tǒng)的設(shè)計
2018-04-26 08:51:34中國礦業(yè)大學(xué)信息與控制工程學(xué)院王宇雷
電子世界 2018年7期
中國礦業(yè)大學(xué)信息與控制工程學(xué)院 王 超 王宇雷 姚 峰
1 引言
車道線檢測作為先進駕駛員輔助系統(tǒng)(ADAS)乃至智慧交通的重要組成部分,極大地改善了傳統(tǒng)駕駛模式中“道路-駕駛員-汽車”的信息獲取流程,提供有效的駕駛決策信息,提高行車安全性。目前,基于車道線特征的算法主要利用車道線的顏色以及邊緣梯度等信息,通過Canny算子、Sobel算子或轉(zhuǎn)換到其它顏色空間如HSL等進行檢測,而后利用Hough變換或最小二乘法進行車道線的提取[1-4];但這類方法易受到復(fù)雜的路面環(huán)境如陰影、積水等因素的影響,對路面狀況要求比較高。基于模型匹配的算法主要通過建立道路模型,當(dāng)檢測到的參數(shù)與模型相匹配時便將其當(dāng)作車道線[5-6];但該方法的時間復(fù)雜度較高,且易受到模型自身的影響。針對基于車道線特征算法對路面狀況要求高以及基于模型的算法時間復(fù)雜度高的缺點,本文設(shè)計出一種結(jié)合基于特征檢測方法與基于模型匹配檢測方法兩種算法優(yōu)點的高效的車道線檢測算法。實驗表明,該系統(tǒng)檢測效果優(yōu)良并具有較好的魯棒性,克服了陰影等不利因素的影響,同時具有一定的實時性。
2 總體方案
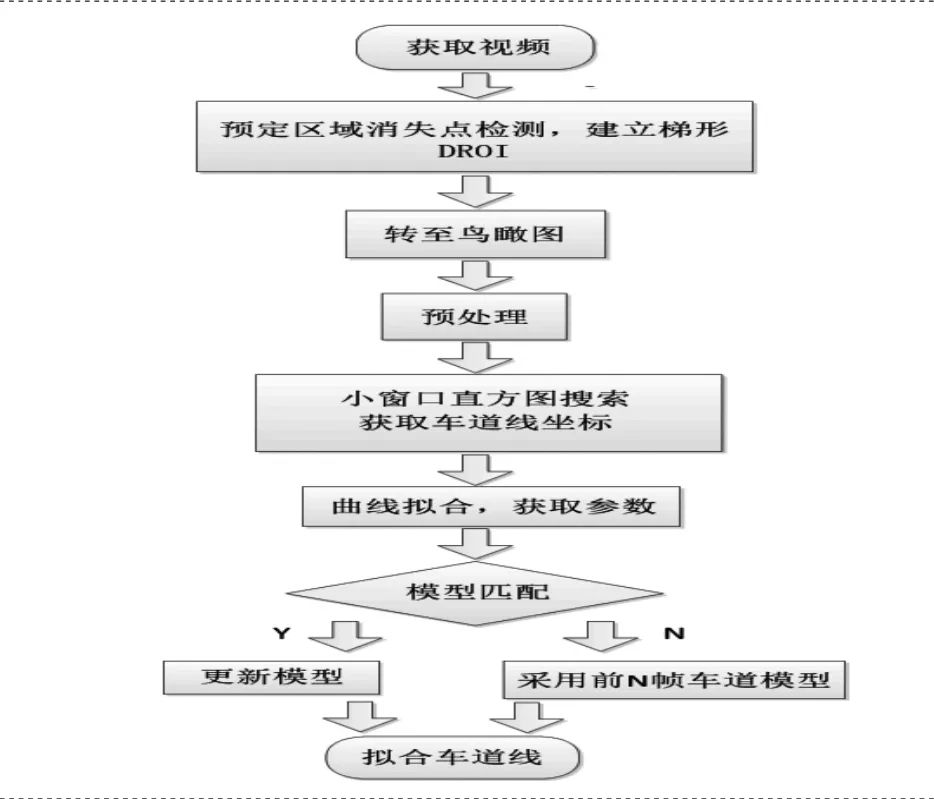
圖1 系統(tǒng)檢測流程圖
系統(tǒng)檢測流程圖如圖1所示,首先在預(yù)定區(qū)域內(nèi)利用概率霍夫變換(HoughlinesP)和最小距離法求解出消失點,以此為基礎(chǔ)建立梯形DROI,該過程除去掉大量無效與干擾區(qū)域,有效地降低后續(xù)過程的運算量,提高了算法的實時性;其次進行視角轉(zhuǎn)換與圖像預(yù)處理,包括通過在HLS和LAB顏色空間的光強和色度等參數(shù)分別建模,并根據(jù)模型在道路圖像中準(zhǔn)確識別出白色和黃色車道線區(qū)域[7];最后,通過小窗口直方圖搜索獲得車道線位置坐標(biāo)以后進行擬合,獲取其模型參數(shù),將該參數(shù)與前N幀獲取的模型參數(shù)進行比較,若差值超過所設(shè)閾值,則將該組參數(shù)拋棄,用前N幀模型的參數(shù)擬合車道線,若未超過所設(shè)閾值,則更新模型參數(shù),擬合車道線。
3 消失點檢測與梯形DROI的設(shè)立

圖2 消失點及梯形DROI示意圖
在結(jié)構(gòu)化的公路上,車道線信息主要集中在圖像的中下部[8],然而在實際過程中所采集的圖像會因路況以及攝像頭安裝角度的不同而產(chǎn)生一定差異,基于先驗知識的圖像分割可能會丟失有效信息或保留干擾信息,不利于后續(xù)過程進行車道線檢測。
圖2中藍線區(qū)域是通過消失點檢測以及先驗知識而建立的梯形DROI,其過程分為如下幾步:
1)基于先驗知識預(yù)先設(shè)定一個大梯形ROI區(qū)域,然后將圖像轉(zhuǎn)換到HLS空間,利用Canny算子對L通道進行邊緣檢測 。
2)利用霍夫概率變換(HoughlinesP)提取直線。
3)利用公式(1)、(2)求取消失點:

其中,I為成本函數(shù),Vp為消失點,Pi為Hough直線上的點,ni為與Hough直線垂直的線,然后利用公式(2)最小化我們的成本函數(shù)即可得到消失點的坐標(biāo)。

4)如圖2所示,聲明2個從Vp均勻偏移且更靠近車輛的點P1,P2,基于先驗知識設(shè)置另外兩個的P3,P4的共同縱坐標(biāo)y,利用公式(3)、(4)分別求解出其橫坐標(biāo),這樣找P3,P4分別在Vp和P1以及Vp和P2所在的直線上。構(gòu)成了上圖中藍色線以內(nèi)的DROI區(qū)域。

4 圖像預(yù)處理
圖像預(yù)處理主要分為三個部分:顏色空間變換(從RGB空間變換到HSL、LAB空間);在變換后的顏色空間中針對顏色的特征進行濾波操作;利用自適應(yīng)閾值檢測算法準(zhǔn)確提取出車道線邊緣輪廓。第一部分,由于不同的顏色空間凸顯顏色不同的特征,在RGB顏色空間中難以表達的特征可以方便地在其他空間表達[9],將上文找到的梯形DROI區(qū)域進行顏色空間變換,這樣做大大減小了后續(xù)提取車道邊緣的難度與計算量;第二部分,在HSL、LAB空間中對白色與黃色進行建模,利用它們與路面和自然景物的不同特征分層濾波,準(zhǔn)確識別出黃色與白色車道線區(qū)域;第三部分,利用自適應(yīng)閾值檢測算法實現(xiàn)圖像的二值化,提取出車道線的邊緣輪廓。
4.1 顏色空間轉(zhuǎn)換
本系統(tǒng)將圖像從RGB空間轉(zhuǎn)換到HSL、LAB空間,通過對圖像的亮度、色相和飽和度等分別建模和濾波,可以有效解決算法對光照條件敏感的問題,大大增強算法的魯棒性。
4.2 基于車道線特征的濾波
車道線的顏色,幾何邊緣與路面都有較大的差異,車道線顏色主要有白色和黃色兩種。白色反射光線能力強,在相同光照條件下,白色的光亮度最高,結(jié)合本文的調(diào)試結(jié)果,當(dāng)選取光亮度值(luminance)大于190時,以圖3(a)為研究對象,得到白車道線如圖3(b)(圖中黃色部分):
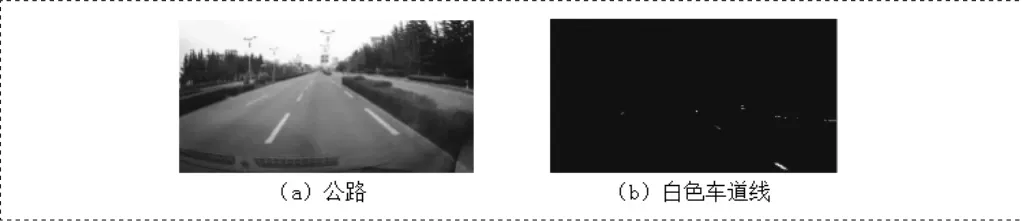
圖3 HSL空間光亮度濾波結(jié)果
實際生活中,車道線的顏色會選取雜色較少的黃色(飽和度高),這樣有利于駕駛員從灰黑色的路面中分辨出車道位置,結(jié)合具體圖片的調(diào)試,設(shè)定飽和度(saturation)大于50;當(dāng)光亮度大于190時,通過上文我們認(rèn)為是白色的區(qū)域,因此設(shè)定光亮度小于190。以圖3(a)為研究對象,得到包含黃色車道線在內(nèi)的自然景物區(qū)域,如圖4所示:
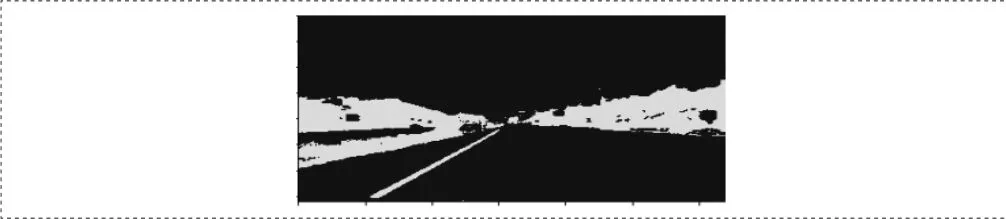
圖4 包含黃色車道線的自然景物
為了把黃車道線從上述處理過的圖中分離,把在HSL空間中濾波后的圖片轉(zhuǎn)換到LAB空間,利用B通道值大于190時表示黃色的特點,對轉(zhuǎn)換后的圖片進行濾波,有效濾去周圍景物,提取出黃色車道線。
HSL色彩空間是極坐標(biāo)空間結(jié)構(gòu),其中光強度分量與色度分量獨立,描述顏色更加直觀,非常適合依靠人的顏色感知特性對圖片進行處理和分析;LAB色彩空間具有感知均勻性,與人對色彩的感知非常接近,將兩個區(qū)域合并,可以達到最佳的處理效果。將得到的圖3(b)與圖(4)合并[10]得到去掉周圍景物的DROI區(qū)域,如圖5所示:

圖5 去掉周圍景物后的DROI區(qū)域
圖6 自適應(yīng)閾值算法得到的二值圖像
4.3 自適應(yīng)閾值邊緣檢測算法
圖像邊緣是指圖像周圍像素灰度急劇變化的區(qū)域,傳統(tǒng)的車道線邊緣檢測常利用Sobel算子、Canny算子、Prewitt和Log等,其中,Sobel算子由于簡單易操作,可以提供檢測邊緣方向信息而被廣泛使用。但是Sobel算子檢測精度不足,常常出現(xiàn)漏檢、偽邊緣的問題。Canny算子以其三個嚴(yán)格的邊緣檢測標(biāo)準(zhǔn):(a)好的信噪比、(b)高的定位精度、(c)單邊緣響應(yīng)而被廣泛應(yīng)用,但是Canny算子需要人為地設(shè)定閾值,當(dāng)路面光照等情況發(fā)生變化時,如果仍然單一地使用Canny算子進行邊緣檢測,一方面,難以自動確定閾值大小;另一方面,對每一幀圖像都使用相同的閾值,很大可能會造成邊緣信息的丟失甚至是出現(xiàn)偽邊緣問題[11]。本文采用自適應(yīng)閾值檢測算法來避免單一閾值造成的問題。
在實際操作中,我們利用3×3的模板作為核與圖像中相同大小的區(qū)域做卷積運算,再在運算后的圖像中利用中值濾波與加權(quán)平均法實現(xiàn)自適應(yīng)閾值來實現(xiàn)圖像的二值化[12]。圖6為通過自適應(yīng)閾值算法得到的二值圖像。

圖7 5×5的核處理后的結(jié)果

圖8 3×3的核處理后的結(jié)果
我們首先選用5×5的模板作為核,如圖7所示,圖像中出現(xiàn)了許多噪點,說明我們選取的核太大了。當(dāng)我們選用3×3的核時,可以明顯發(fā)現(xiàn)圖中的噪點非常少,而得到的車道邊緣比較令人滿意,如圖8所示。
5 獲取車道線坐標(biāo)

圖9 直方圖小窗搜索
如圖9所示,取圖像底部垂直的一半,并通過直方圖計算像素值的垂直和,找到最大的位置,并將該點作為車道線的起始點;然后自下而上沿著小框搜索最大像素密度的位置,該位置即為車道線的位置。利用最小二乘法擬合左右兩側(cè)車道線的參數(shù)方程,得到其曲線方程y = ax2+ bx + c 中的參數(shù)a,b,c。
6 模型匹配
在對序列圖像進行實時處理時,由于攝像機采集速度較快(如30幀/s),連續(xù)采集的兩幀圖像中車道位置偏差不會太大(在車速為120km/h時,采集一幀圖像車向前行駛約1m),因此車道邊緣點的位置具有一定的可預(yù)測性[13]。在車道線檢測這樣一個連續(xù)過程中,前T幀的車道線模型參數(shù)對第(T+1)幀車道線參數(shù)具有良好的預(yù)測與約束作用。本文所設(shè)計的系統(tǒng)將會保存T(T=20)幀的有效車道線模型有關(guān)信息。當(dāng)系統(tǒng)處于初始化狀態(tài)則將當(dāng)前幀的候選車道線當(dāng)作穩(wěn)定車道線,即作為最終檢測結(jié)果[14]。
當(dāng)?shù)冢═+1)幀檢測出的車道線模型與其之前T幀模型平均值差異較大時并超過所設(shè)閾值時,舍棄該幀所得參數(shù)模型,采用第T幀的模型進行擬合;否則,采用此幀的車道線參數(shù)進行車道線擬合并更新已獲得的車道線模型。
7 實驗結(jié)果
為了驗證所設(shè)計系統(tǒng)的有效性與實時行,筆者在徐州某市外高速公路,棗莊某市內(nèi)公路以及某森林公園內(nèi)等地進行了行車視頻提取與車道檢測,部分檢測效果統(tǒng)計如下:

表1 實驗結(jié)果統(tǒng)計表
通過對高速公路、棗莊市區(qū)道路、徐州郊區(qū)道路以及某環(huán)山公路進行車道線檢測實驗,結(jié)果如表1所示,本系統(tǒng)的綜合檢測精確度可達到94%以上,基本實現(xiàn)了車道線的有效檢測,滿足了結(jié)車道線檢測需求;同時由于梯形DROI的設(shè)立,有效的減少了運算量,一定程度上提高了實時性。
8 結(jié)論
本文首先通過求解出消失點建立梯形DROI,有效的減少了后續(xù)算法的運算量,提高了系統(tǒng)的實時性;同時利用結(jié)構(gòu)化車道的特征,將圖像分別轉(zhuǎn)換到LAB與HSL顏色空間提取車道線,有效的克服了陰影等不良因素的影響,提高了算法的魯棒性;最后通過直方圖小窗搜索找到車道線的位置以及與已獲得車道線模型進行匹配,進行車道線模型的更新與車道線的擬合。實驗表明,該系統(tǒng)能夠?qū)Y(jié)構(gòu)化車道進行有效的檢測。下一步將進一步提高系統(tǒng)的實時性以及對于曲率較大的公路的擬合程度。
[1]孫偉,張小瑞,唐慧強,等.Hough變換和最小二乘擬合的車道線協(xié)調(diào)檢測[J].光電工程,2011,38(10)∶13-19.
[2]趙穎,王書茂,陳兵旗.基于改進Hough變換的公路車線快速檢測算法[J].中國農(nóng)業(yè)大報,2006,11(3)∶104-108.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
海峽科技與產(chǎn)業(yè)(2016年3期)2016-05-17 04:32:12