
環境實驗室溫濕度模糊控制系統設計
2010-01-20 01:44:00伍文平張智盛張明
現代電子技術 2009年21期
伍文平 張智盛 張 明
摘 要:環境實驗室溫度、濕度變化具有非線性、大滯后、精度要求高、建立數學模型復雜等特點,傳統控制方式具有精度不夠或模型復雜等限制。根據系統需求,通過溫度及濕度傳感器采集數據,基于模糊控制理論,通過制定規則,選取參數因子,經過模糊控制算法運算,得到合理的控制量,通過控制量驅動控制裝置,使溫度、濕度趨向設定值。本設計與傳統控制方式相比在收斂速度、控制精度、系統穩定性等方面具有明顯的改善。
關鍵詞:模糊控制;溫度;濕度;監控系統
中圖分類號:TP273 文獻標識碼:A
文章編號:1004-373X(2009)21-149-03
Design of Condition Lab′s Temperature and Humidity Fuzzy Control System
WU Wenping,ZHANG Zhisheng,ZHANG Ming
(PLA Unit 69046,Urumqi,830001,China)
Abstract:The condition lab′s temperature and humidity have the characteristics of non-linear,long delay,high precision and complicated mathematic model.Conventional control system has the bug of low precision and too complicated model.The data collected from temperature and humidity sensors is computed with the established rules and the selected factors based on the fuzzy control theory,the final result is acquired to control the temperature and humidity factors trend to the setting.This system has virtues of quick convergence,high precision and high stability contrast to conventional system.
Keywords:fuzzy control;temperature;humidity;monitoring control system
傳統的溫、濕度閉環控制通常采用開關控制或PID控制,前者實現簡單但精度差,后者精度高,但需建立數學模型,參數整定要求較高[1,2],而在溫濕度非線性復雜變化的環境下,不易精確建模[1]。模糊控制理論是能夠模擬人腦智能,隨環境變化的自適應控制技術,適合于非線性系統和難以用數學模型精確描述的復雜系統。進一步可以采用神經網絡與模糊推理結合的控制新模式。
1 環境實驗室溫濕度監控系統結構
環境實驗室溫、濕度監測控制機構見圖1。溫、濕度傳感器測得的信號經過調理,輸入到模糊控制算法模塊,產生決策信號控制驅動件(加熱器、制冷器、加濕器、除濕器),保持環境實驗室溫、濕度恒定在設定值。
2 控制系統模糊控制機理
典型的模糊邏輯控制由模糊化、模糊推理和清晰化三部分組成。下面以溫度控制為例來具體說明。依據傳統模糊控制模型,本設計中溫度模糊控制系統原理如圖2所示[4]。

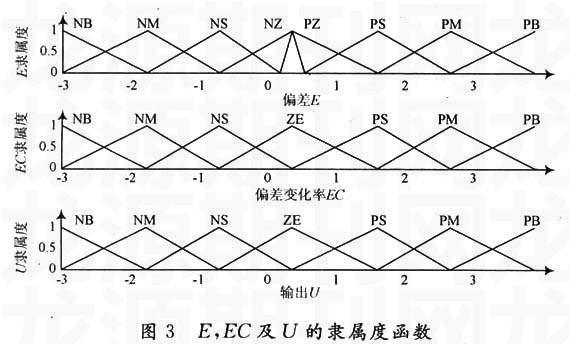
模糊控制器選用雙輸入單輸出控制方式,以溫度誤差e和誤差變化率ec作為輸入變量,以u作為輸出變量。模糊子集為E=EC=U={NB,NM,NS,ZE,PS,PM,PB}={負大,負中,負小,零,正小,正中,正大},其論域為[5]:e=ec=u=[-3,3]={-3,-2,-1,0,1,2,3}。隸屬度函數采用三角分布函數,如圖3所示。
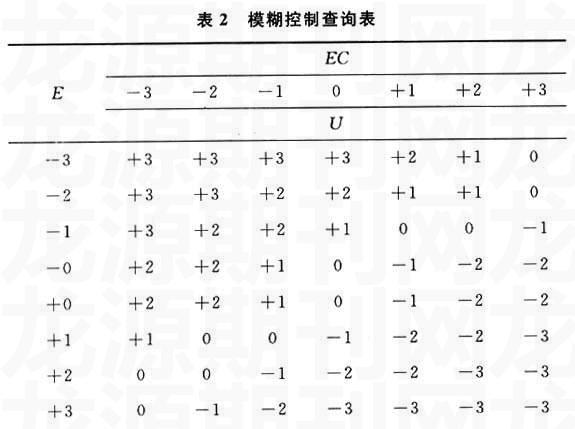
根據控制系統的輸入/輸出特性,以消除溫度偏差為控制目標,制訂控制規則如表1所示。
由模糊規則進行推理可以得出模糊控制器語言規則的輸入輸出關系,其關系是一個非線性的關系曲面。當偏差較大時,控制量的變化應盡力使偏差迅速減小;當偏差較小時,除了要消除偏差外,還要考慮系統的穩定性,防止系統出現過沖,甚至引起系統振蕩。
由隸屬度函數及規則表,使用Mamdani推理方法和面積重心法進行清晰化,可得到控制查詢表。
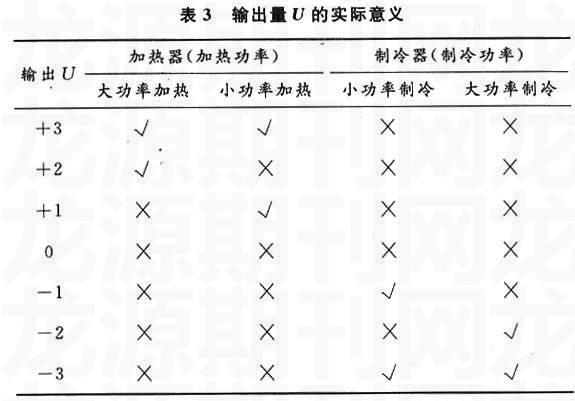
對應輸出量U實際意義如表3所示。
工作機理:依照模糊控制查詢表建立的二維常數數組,將輸入偏差E和偏差變化率EC量化到其基礎變量論域,作為數組的行和列實時檢索該查詢表,得到實時輸出U,依照輸出量U的實際意義控制加熱器或制冷器,從而驅使溫度穩定在設定值。
3 控制系統程序設計
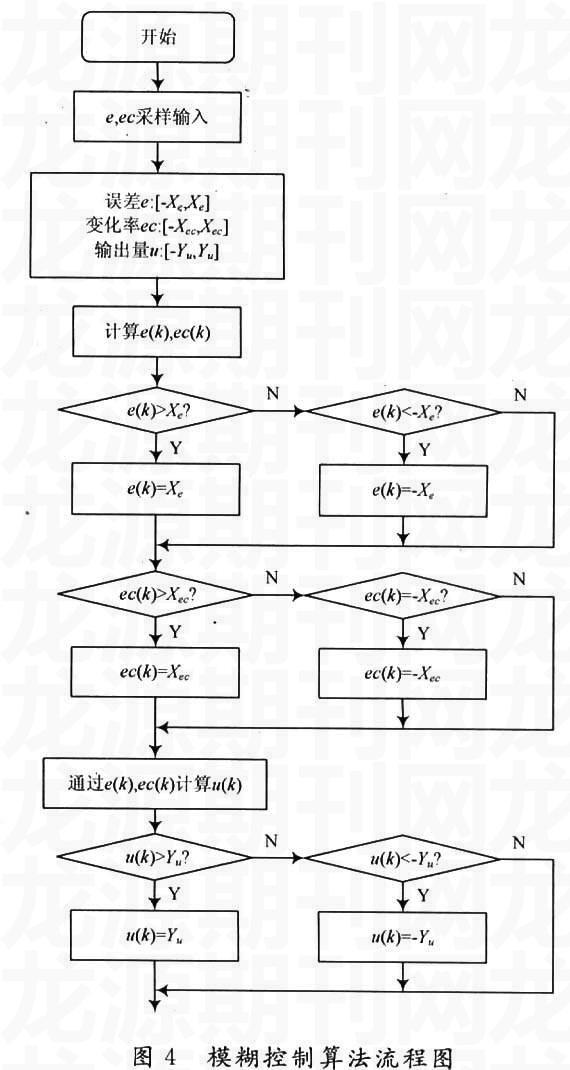
采用ST語言進行程序設計,包括主程序、模糊控制算法、中斷服務程序、操作命令與報警程序,其中模糊控制算法程序流程圖如圖4所示。
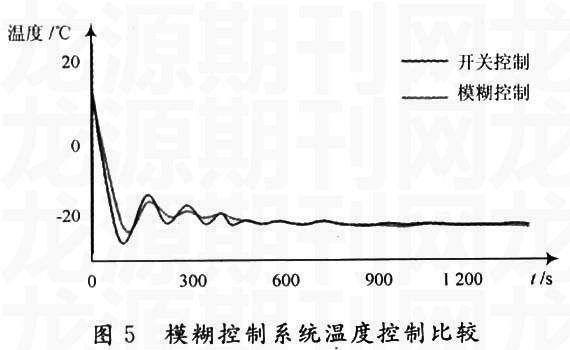
4 應用效果
外部環境溫度從16 ℃降溫到-20 ℃,應用效果如圖5所示,從開始到基本穩定(與設定值相差±1 ℃)用時510 s,系統穩定后波動范圍在±0.8 ℃以內。收斂速度、系統穩定性與量化因子、比例因子有關,合理選擇量化因子、比例因子,在收斂速度與穩定性之間取得平衡。
5 結 語
本設計采用基于模糊控制理論的控制策略,實現了環境實驗室的溫度、濕度的可靠測量和控制,具有精度高、穩定性好、收斂速度快等優點,與傳統開關控制系統相比,具有精度、速度、穩定優勢;與基于預測的模糊控制方式[6]、雙模糊控制策略[7]、參數自學習模糊控制[8]策略相比減少了運算復雜度。
對于溫、濕度具有明顯耦合效應的環境,可以采用溫、濕度解耦合運算后[9],再分別進行控制。
參考文獻
[1]劉振全,王朝玉.基于單片機的冬棗保鮮庫溫、濕度監控系統.天津輕工業學院學報,2003,18(3):39-42.
[2]鄧榮.基于AT89S52單片機的啤酒發酵溫度控制系統.國外電子測量技術,2007,26(11):59-61.
[3]鞠訓光,于洪珍.基于神經網絡-模糊推理構建彈藥貯存溫度濕度監控系統.空軍工程大學學報,2005,6(6):34-37.
[4]南新元,陳志軍,程志江.基于模糊PID控制的電鍋爐溫度過程控制系統.自動化儀表,2008,29(5):5-8.
[5]馬秀坤,馬學軍.基于PC-Based的溫度智能控制系統研究.微計算機信息,2007,23(7):55-56.
[6]陸錦軍.基于預測的模糊溫度控制系統的設計.自動化儀表,2005,26(9):31-33.
[7]訾斌,段寶巖,黃進.基于模糊控制器的LNB溫度控制系統.計算機工程,2007,33(1):230-232,235.
[8]黃浩,申群泰.基于參數自調整的真空燒結爐溫度模糊控制系統.應用科技,2005,32(11):48-50.
[9]劉瑞霞,王玲,王永新.潔凈室的溫濕度控制設計.自動化儀表,2005,26(8):19-21.
作者簡介 伍文平 男,1969年出生,1993年畢業于解放軍理工大學,碩士研究生,高級工程師。主要從事通信工程設計與仿真工作。
