平面葉柵柵后4軸伺服位移控制系統(tǒng)開發(fā)與應(yīng)用
2010-03-15 03:39:38王東梅繁吳法勇劉曉鵬
航空發(fā)動(dòng)機(jī) 2010年4期
王東,梅繁,吳法勇,劉曉鵬
(沈陽發(fā)動(dòng)機(jī)設(shè)計(jì)研究所,沈陽110015)
1 引言
柵后測(cè)量位移機(jī)構(gòu)是平面葉柵風(fēng)洞試驗(yàn)器重要的測(cè)量支持裝置之一。隨著葉柵試驗(yàn)技術(shù)的發(fā)展,詳細(xì)全面測(cè)量柵后流場(chǎng)特性已成為平面葉柵試驗(yàn)的重要組成部分。因此,1套適合于柵后測(cè)量、定位精度高、角位移隨動(dòng)良好的4軸伺服控制系統(tǒng)成為決定平面葉柵試驗(yàn)測(cè)試質(zhì)量?jī)?yōu)劣的重要設(shè)備。
本文介紹了4軸伺服位移控制系統(tǒng)的開發(fā)和應(yīng)用過程,并給出了后續(xù)改進(jìn)建議。
2 系統(tǒng)組成
4軸伺服位移控制系統(tǒng)采用PLC可編程控制技術(shù),并利用組態(tài)王和VB軟件做為2次開發(fā)平臺(tái),與上位機(jī)進(jìn)行通訊,完成實(shí)時(shí)控制與通訊,形成自身的閉環(huán)控制,從而確保被控探針精確到位。該系統(tǒng)是由機(jī)械傳動(dòng)、伺服控制、測(cè)試及通訊4部分組成的全閉環(huán)位移控制系統(tǒng),系統(tǒng)控制原理如圖1所示。下面著重介紹機(jī)械傳動(dòng)和伺服控制2部分。
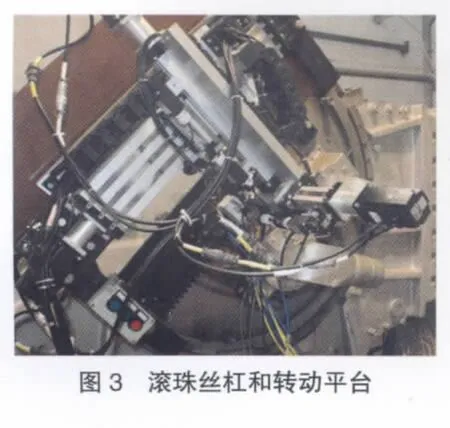
2.1 機(jī)械傳動(dòng)部分

機(jī)械傳動(dòng)部分由3個(gè)單滑塊滾珠絲杠傳動(dòng)定位單元和1維旋轉(zhuǎn)平臺(tái)組成(如圖2、3所示),其直線定位最小檢測(cè)單位為±0.005 mm,角位移最小分辨率為0.036°。在4個(gè)坐標(biāo)軸中,X軸為葉柵額線方向,Y軸為柵后位置調(diào)整方向,Z軸為葉高方向,M軸為角向。

使用該機(jī)構(gòu)可實(shí)現(xiàn)下列方式的柵后逐點(diǎn)跟蹤測(cè)量:(1)角向旋轉(zhuǎn)平臺(tái)繞X軸聯(lián)動(dòng);(2)角向旋轉(zhuǎn)平臺(tái)繞X軸、Y軸直線插補(bǔ);(3)角向旋轉(zhuǎn)平臺(tái)繞X、Y軸直線插補(bǔ)和Z軸聯(lián)動(dòng);(4)角向旋轉(zhuǎn)平臺(tái)繞X軸、Y軸非同步逼近的圓弧插補(bǔ)。
2.2 伺服控制部分
伺服控制部分主要由PLC可編程控制器、4個(gè)伺服驅(qū)動(dòng)器及外圍電器元件組成,如圖4所示。
3 系統(tǒng)特性
該控制系統(tǒng)的X、Y、Z軸的位移指令和被控量均為直線位移;M軸的位移指令為角位移,被控量為探針測(cè)得的方向壓差。由于方向壓差信號(hào)隨流場(chǎng)條件改變而變化,因此設(shè)計(jì)系統(tǒng)時(shí)賦予了該信號(hào)較高的靈敏性和準(zhǔn)確性。
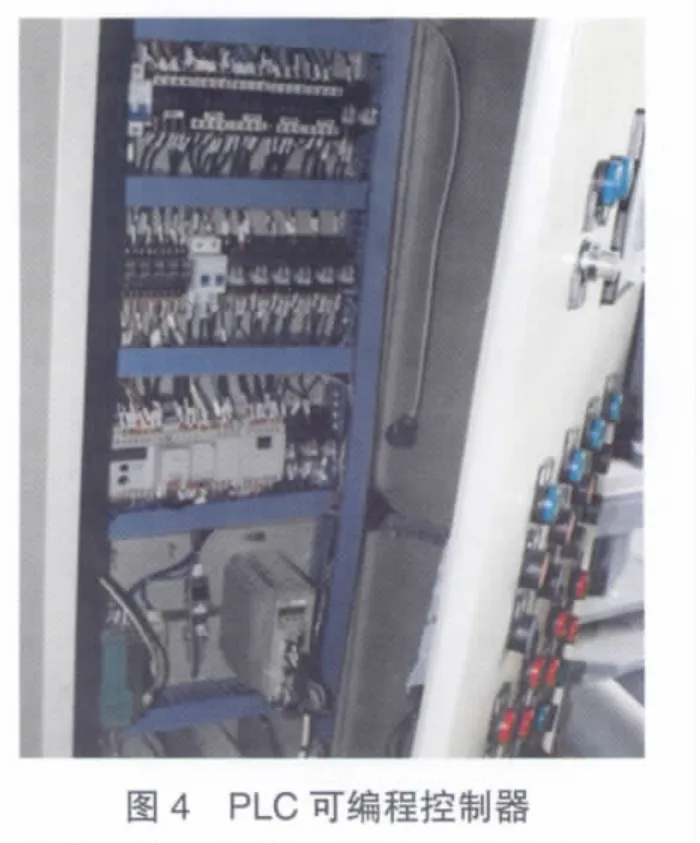
圖5給出了角向位置隨動(dòng)原理方案,其中PLC模塊起到處理器的作用。角向位置隨動(dòng)工作原理是:探針2個(gè)方向孔測(cè)到的壓差,通過差壓變送器轉(zhuǎn)換成電流信號(hào),送入PLC采集模塊并轉(zhuǎn)換成數(shù)字量,然后經(jīng)過偏差計(jì)數(shù)器,與PLC初始采集靜態(tài)探針方向壓差信號(hào)比較,經(jīng)過角度修正后,轉(zhuǎn)化成伺服驅(qū)動(dòng)器識(shí)別的控制移動(dòng)指令再驅(qū)動(dòng)伺服電機(jī),從而拖動(dòng)探針隨實(shí)際氣流方向轉(zhuǎn)動(dòng)。探針轉(zhuǎn)動(dòng)的角度從伺服驅(qū)動(dòng)器中讀出,并經(jīng)PLC將絕對(duì)碼轉(zhuǎn)換成標(biāo)準(zhǔn)的0~20 mA電流信號(hào),送入VXI數(shù)采系統(tǒng),其最小分辨率可達(dá)到5μA。

當(dāng)偏差計(jì)數(shù)器為零時(shí),探針楔面壓差為零,表明探針方向與氣流方向一致,系統(tǒng)處于靜止?fàn)顟B(tài);當(dāng)偏差信號(hào)大于±10個(gè)碼值(滿量程的1/400)時(shí),控制移動(dòng)指令讓伺服驅(qū)動(dòng)系統(tǒng)帶動(dòng)探針朝壓差信號(hào)減小的方向運(yùn)動(dòng),因此控制探針始終跟蹤氣流的方向,偏差小于±0.3°。
從實(shí)際應(yīng)用情況看,該系統(tǒng)的直線定位精度達(dá)到0.01 mm,直線插補(bǔ)定位精度達(dá)到0.015 mm,角位移隨動(dòng)系統(tǒng)精度達(dá)到0.3°。圖6舉例給出了某試驗(yàn)中實(shí)測(cè)的角位移隨動(dòng)控制曲線。從圖中看出,該控制系統(tǒng)具有良好的穩(wěn)定性和重復(fù)性,其主要指標(biāo)可以滿足試驗(yàn)要求。

4 控制指令與后置處理算法
從4軸位移控制系統(tǒng)組成和分析來看,對(duì)不同試驗(yàn)件要執(zhí)行不同測(cè)試功能。因此,后置處理算法的主要任務(wù)就是控制探針與試驗(yàn)件的相對(duì)位置,隨動(dòng)控制精度,然后經(jīng)過幾何變換、數(shù)值計(jì)算與求解,最終通過控制代碼的轉(zhuǎn)換與插值來實(shí)現(xiàn)對(duì)位移機(jī)構(gòu)的控制。
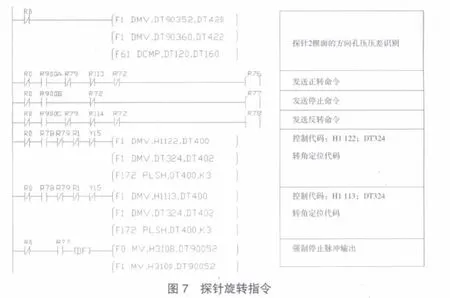
4.1 角向算法與旋轉(zhuǎn)指令
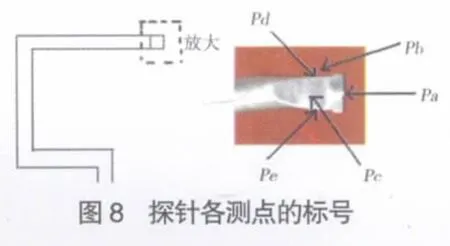
角向隨動(dòng)系統(tǒng)控制是將被控探針感受的壓力變化通過傳感器轉(zhuǎn)換成標(biāo)準(zhǔn)電流信號(hào),然后與PLC采集的實(shí)時(shí)校準(zhǔn)數(shù)據(jù)比較,經(jīng)過運(yùn)算發(fā)出控制指令(如圖7所示),驅(qū)動(dòng)可逆電機(jī)轉(zhuǎn)動(dòng);為控制探針轉(zhuǎn)角的大小,利用測(cè)得的總壓、2楔面的方向孔壓力,經(jīng)PLC計(jì)算取得Ka修正系數(shù),用于控制伺服驅(qū)動(dòng)器的轉(zhuǎn)角指令脈沖,并以該脈沖控制伺服電機(jī)帶動(dòng)探針按轉(zhuǎn)角指令轉(zhuǎn)動(dòng),從而使探針在跟蹤氣流方向上達(dá)到自動(dòng)平衡。探針各測(cè)點(diǎn)的標(biāo)號(hào)如圖8所示。
Ka系數(shù)的計(jì)算為

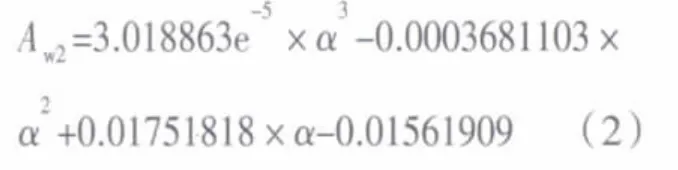
由于柵后實(shí)測(cè)來流馬赫數(shù)并不等于標(biāo)定時(shí)的馬赫數(shù),所以角度計(jì)算時(shí),先用實(shí)測(cè)值按式(2)計(jì)算出Aw2,然后與如圖9所示的角度標(biāo)定曲線比較,若二者差值小于0.5%,則認(rèn)為探針已對(duì)準(zhǔn)氣流方向,
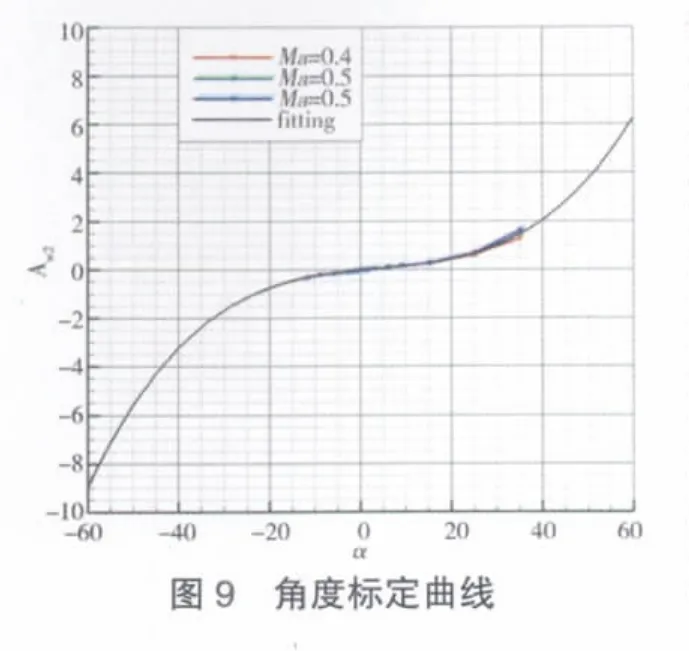
否則將繼續(xù)轉(zhuǎn)動(dòng)探針。
4.2 帶角向旋轉(zhuǎn)的X、Y軸直線同步插補(bǔ)指令與算法
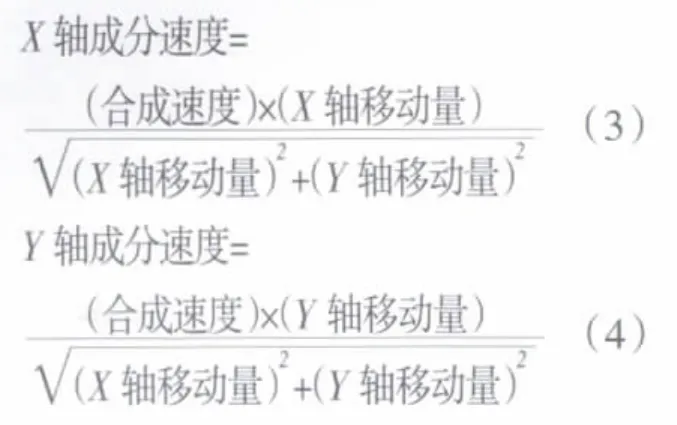
目標(biāo)軸(X,Y)的位移量是由上位機(jī)給定,2軸插補(bǔ)的速度按式(3)、(4)計(jì)算,相關(guān)指令如圖10所示。
4.3 帶角向旋轉(zhuǎn)的X軸、Y軸直線同步插補(bǔ)指令與Z軸聯(lián)動(dòng)控制算法
為實(shí)現(xiàn)全流場(chǎng)的測(cè)試,采用雙軸直線同步插補(bǔ)與Z軸聯(lián)動(dòng)對(duì)流場(chǎng)進(jìn)行逐行測(cè)量及角度自動(dòng)跟蹤方式。該方式對(duì)研究平面葉柵二次流的機(jī)理有很大意義。
4.4 空間任意曲線多軸聯(lián)動(dòng)的控制指令

該系統(tǒng)可通過單獨(dú)發(fā)送3個(gè)軸的定位脈沖,來執(zhí)行空間任意曲線多軸聯(lián)動(dòng)命令。圖11舉例給出了X軸直線定位指令。
5 結(jié)束語
(1)該系統(tǒng)的位移機(jī)構(gòu)設(shè)計(jì)新穎,布局合理,控制精度高,使用壽命長(zhǎng)。
(2)該系統(tǒng)的直線定位精度為0.028 mm,M軸角向位移定位精度為0.036°,角向隨動(dòng)控制精度為0.3°,完全可以滿足常規(guī)試驗(yàn)需要。
(3)該系統(tǒng)實(shí)現(xiàn)了對(duì)柵后流場(chǎng)的全方位測(cè)量,使用靈活、方便、可靠,不僅可加快試驗(yàn)進(jìn)程,而且可保護(hù)探針的使用安全,具有很強(qiáng)的推廣使用價(jià)值。
目前,使用該系統(tǒng)測(cè)得的角度未考慮到齒系誤差,需要在后續(xù)工作中進(jìn)一步改進(jìn)。
[1] Panasonic可編程控制器FP系列編程手冊(cè)[CP].ARCT1F313 0409.
[2] YASKAWA.Σ-Ⅱ系列SGM H/SGDH用戶手冊(cè)[CP].SIGPS80000005A.
[3] 松下電工株式會(huì)社.可編程控制器FP-X用戶手冊(cè)[CP].ARCT1F409C.
猜你喜歡
科普童話·神秘大偵探(2023年1期)2023-05-30 12:48:10
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
計(jì)算機(jī)應(yīng)用(2022年2期)2022-03-01 12:33:42
計(jì)算機(jī)應(yīng)用(2021年4期)2021-04-20 14:06:36
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
計(jì)算機(jī)應(yīng)用(2021年1期)2021-01-21 03:22:38
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
測(cè)控技術(shù)(2018年5期)2018-12-09 09:04:26
電子測(cè)試(2018年18期)2018-11-14 02:30:34
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45