面向精密制造的微材料特性檢測機構(gòu)
2010-03-16 09:21:34陸震
北京航空航天大學學報 2010年3期
關(guān)鍵詞:優(yōu)化
陸 震
(北京航空航天大學 自動化科學與電氣工程學院,北京 100191)
陳學東
(華中科技大學 機械科學與工程學院,武漢 430074)
何廣平
(北方工業(yè)大學 機電工程學院,北京 100144)
面向精密制造的微材料特性檢測機構(gòu)
陸 震
(北京航空航天大學 自動化科學與電氣工程學院,北京 100191)
陳學東
(華中科技大學 機械科學與工程學院,武漢 430074)
何廣平
(北方工業(yè)大學 機電工程學院,北京 100144)
微機電系統(tǒng)(MEMS,Micro Electromechanical Systems)在航空航天、汽車、生物醫(yī)學、環(huán)境監(jiān)控、軍事等領(lǐng)域中有著廣泛的應(yīng)用前景.其材料力學性能的測試目前是其性能測試的薄弱環(huán)節(jié),它涉及到微位移、精密定位和載荷/位移測量.采用傳統(tǒng)“機械”制造技術(shù),由于摩擦、間隙、爬行和多環(huán)節(jié)傳動誤差積累等原因而無法實現(xiàn).為此,提出了一種冗余驅(qū)動全柔性并聯(lián)機構(gòu)和壓電陶瓷驅(qū)動器所組成的新型測量平臺.在推導 4RRR冗余驅(qū)動并聯(lián)機構(gòu)運動學逆問題方程的基礎(chǔ)上,經(jīng)過最佳拓撲選擇、運動學分析,并基于動力學優(yōu)化,確定了微位移/精密定位運動平臺主要結(jié)構(gòu)尺寸.實驗表明:采用該平臺,可以滿足 MEMS材料力學性能測量所需的微位移和精確定位要求.
微機電系統(tǒng);冗余驅(qū)動;全柔性機構(gòu)
微機電系統(tǒng)(MEMS,Micro Electromechanical Systems)是一種適于批量制作的、集微型機構(gòu)、微型傳感器、微型執(zhí)行器以及相應(yīng)的信號處理和控制、通信接口、電源等微電子器件在一體的能完成特定功能的微系統(tǒng).EMS技術(shù)最初是借鑒上個世紀 50年代的微電子技術(shù),在大規(guī)模半導體芯片工藝基礎(chǔ)上發(fā)展起來的.與微電子系統(tǒng)不同,MEMS涉及機、電、光等多種信號介質(zhì)和多個物理場,各種微構(gòu)件通過變形實現(xiàn)運動和功能,其尺度一般在亞微米到毫米級,屬于微觀或介觀的尺度范圍.受加工工藝、尺寸效應(yīng)和表面缺陷等因素的影響,微構(gòu)件力學性能無法以宏觀力學所能解釋,它涉及到微流體、微潤滑、微觀材料力學等基礎(chǔ)理論問題,其材料力學性能的研究是個重要的理論問題,包括硬度、彈性模量、屈服強度、斷裂強度、疲勞強度等.微構(gòu)件的尺寸越小,它所表現(xiàn)的尺寸效應(yīng)越突出,迫切需要方便可靠的測試方法和測試儀器.需要檢測的參數(shù)主要包括微機械量、微幾何量、微材料特性和電參數(shù).其中電參數(shù)的檢測技術(shù)成熟,而微材料特性檢測目前是 MEMS測量技術(shù)的薄弱環(huán)節(jié).這些涉及到微位移、精密定位和載荷/位移測量.定位精度和分辨率從微米、亞微米到納米,并要求有足夠的驅(qū)動力、運動范圍和控制精度.采用常規(guī)的電動機、機構(gòu)、運動副的傳動方式往往由于摩擦、間隙、爬行和多環(huán)節(jié)傳動誤差積累等原因而無法實現(xiàn),必須尋找新型的驅(qū)動元件和傳動機構(gòu).
本文采用冗余驅(qū)動的全柔性并聯(lián)機構(gòu)和壓電陶瓷的驅(qū)動器組成了 MEMS材料力學性能測試裝置.整個裝置由精密定位子系統(tǒng)、載荷/位移測量子系統(tǒng)、試件夾持子系統(tǒng)和測控子系統(tǒng)組成,本文主要討論精密定位子系統(tǒng).
1 全柔性機構(gòu)
上世紀 80年代提出了全柔性機構(gòu)或稱為柔順機構(gòu)(comp lian mechanism)的概念[1].它與通常意義下的柔性機構(gòu)(flexible linkage)研究有本質(zhì)不同.在柔性機構(gòu)中,人們考慮的是如何避免或消除因其自身所具有的彈性造成的變形和振動.而在全柔性機構(gòu)的研究中,人們恰恰關(guān)心的是利用機構(gòu)元素的彈性實現(xiàn)運動和力的傳遞.其優(yōu)點是:①整體化或單片化設(shè)計可簡化結(jié)構(gòu),免于裝配,統(tǒng)計表明,裝配成本占整個制造成本的 50%.②無傳統(tǒng)運動副構(gòu)成的機械系統(tǒng)的間隙和摩擦,可實現(xiàn)高精度運動.③無磨損,提高了系統(tǒng)的工作壽命.④免于潤滑,沒有潤滑劑對外界的污染,也沒有外界灰塵對機構(gòu)運轉(zhuǎn)的不利影響.⑤由于取消了軸承等剛度薄弱環(huán)節(jié),系統(tǒng)的綜合剛度好.全柔性機構(gòu)可分為集中柔度全柔性機構(gòu)和分布柔度全柔性機構(gòu).采用并聯(lián)的全柔性機構(gòu)可以很好地實現(xiàn) MEMS微機械力學性能測試.全柔性機構(gòu)的柔性鉸鏈本身有變形誤差,并聯(lián)機構(gòu)運動鏈的布置.可以限制這種誤差的累積和放大,良好的整體剛度能夠保證機構(gòu)有較高的定位精度和抗擾動能力.并聯(lián)機構(gòu)的結(jié)構(gòu)緊湊,這與全柔性機構(gòu)作為緊密定位系統(tǒng)執(zhí)行機構(gòu)的要求相吻合.并聯(lián)機構(gòu)的對稱結(jié)構(gòu)還可以補償溫度變化和加工等因素引起的誤差,從整體上提高系統(tǒng)的運動精度和定位精度,同時對稱性結(jié)構(gòu)也便于加工和模塊化.而并聯(lián)機構(gòu)工作空間小的缺點對全柔性機構(gòu)是無關(guān)緊要的.并聯(lián)機構(gòu)在實際運用中,還存在著奇異位形、避障性能差、驅(qū)動鉸鏈載荷分配不合理等問題.若在并聯(lián)機構(gòu)中采用冗余驅(qū)動方式可以較好地解決這些問題.常見的并聯(lián)機構(gòu)冗余驅(qū)動方式有 2種:①將并聯(lián)機構(gòu)的某些被動鉸鏈變?yōu)橹鲃鱼q鏈;②在并聯(lián)機構(gòu)中增加零約束的驅(qū)動分支.圖 1為2自由度的非冗余驅(qū)動并聯(lián)機構(gòu)和 2種冗余驅(qū)動的并聯(lián)機構(gòu).對于傳統(tǒng)的微間隙剛性機構(gòu),冗余驅(qū)動是難以實現(xiàn)的,必須采用復雜的控制系統(tǒng)和控制策略,解決由于冗余驅(qū)動引起的驅(qū)動器間的力紛爭問題.但是對于微動全柔性機構(gòu)卻是易于實現(xiàn)的,并能顯著改善機構(gòu)的力傳遞性能.本文以圖2所示的 3自由度冗余驅(qū)動并聯(lián)機構(gòu)作為微材料特性檢測的微位移和精密定位系統(tǒng)的機械本體.其設(shè)計過程包括最優(yōu)拓撲選擇、運動學建模和模型分析、機構(gòu)力傳遞性能優(yōu)化和機構(gòu)全柔性化.
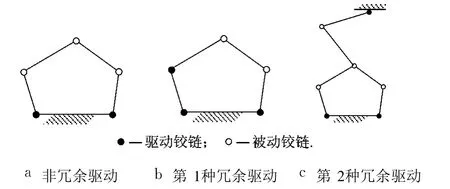
圖1 2自由度平面并聯(lián)機構(gòu)和冗余驅(qū)動并聯(lián)機構(gòu)
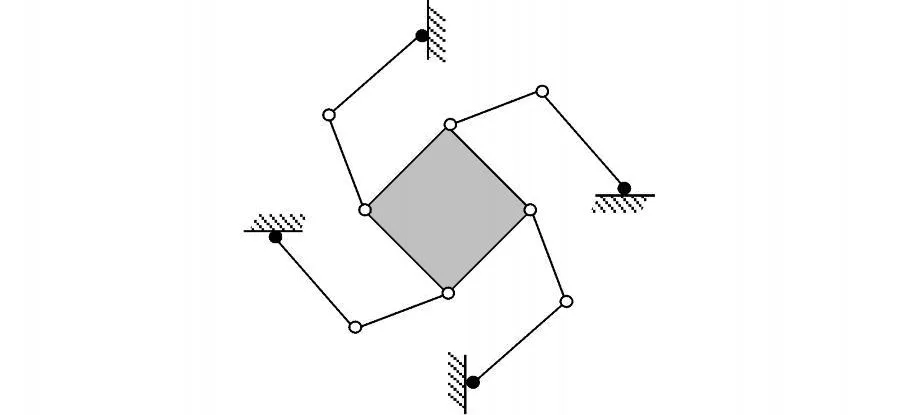
圖2 3自由度冗余驅(qū)動并聯(lián)機構(gòu)
2 最優(yōu)拓撲選擇和運動學模型
上述 4支鏈平面并聯(lián)機構(gòu)由 4個 RRR支鏈將運動平臺和機架連接起來形成.如果各支鏈的連架鉸鏈均為驅(qū)動鉸鏈,如圖 2中實心圓所示,則機構(gòu)為冗余驅(qū)動方式.各支鏈具有 2種構(gòu)型,如圖3中的實線和虛線所示.對于 4個支鏈應(yīng)該有 8種不同組合,考慮到對稱性,實際上是 4種拓撲構(gòu)型.由在工作空間中 Jacobian矩陣的條件數(shù)計算可知,其中 4支鏈走向為同一方向的構(gòu)型,即圖 2所示的構(gòu)型,具有最好的運動各向同性特征[2].圖 4為所設(shè)計的 4RRR平面冗余驅(qū)動并聯(lián)機構(gòu)運動簡圖.為簡化設(shè)計,取固定平臺為正方形,動平臺也為正方形,它們的邊長為 H和 C.各支鏈的兩個桿長分別為 a和 b.機構(gòu)的主要參數(shù)為:C=H=80mm,a=b=25mm.動平臺標志線 OC1與 x軸的初始夾角 β0=82°.冗余驅(qū)動機構(gòu)的運動學正問題方程是超定方程組,即矛盾方程組,是無解的,輸入變量必須滿足一定的相容條件,才有準確解.與正問題不同,其逆問題是可解的.與動平臺相連的鉸鏈為 Ci(i=1,2,3,4)在固定坐標系中的坐標為


圖3 支鏈的兩種裝配構(gòu)型
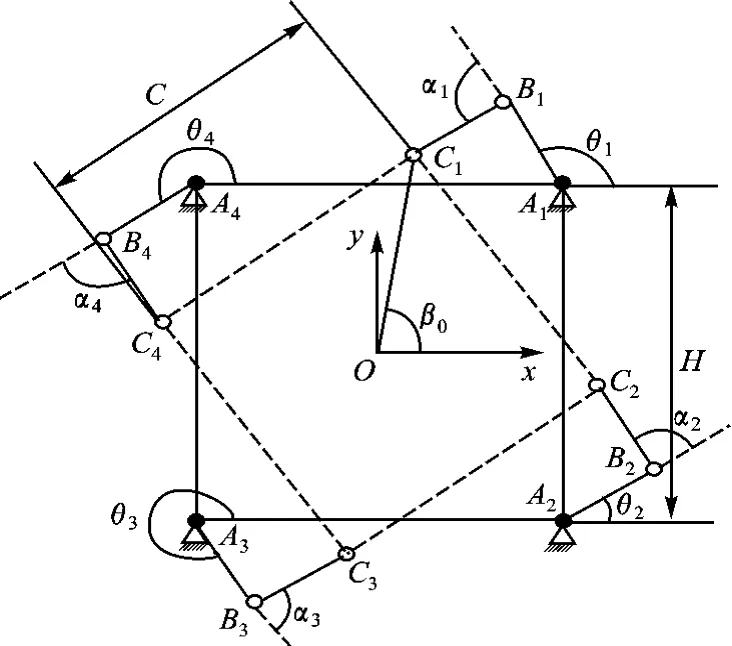
圖4 4RRR平面并聯(lián)機構(gòu)
若已知動平臺的位姿 x,y,β,鉸鏈 Ci(i=1,2,3,4)的坐標還可以表示為

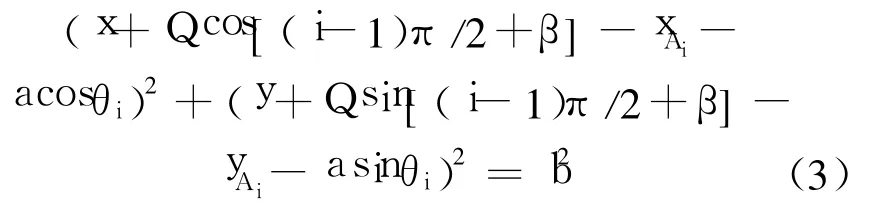
由方程(3)進行機構(gòu)運動學逆問題位移分析,分別考慮動平臺平動和純轉(zhuǎn)動 2種情況,機構(gòu)輸入角 θ1,θ2,θ3,θ4在各位置的變化分別如表 1和表 2所示.
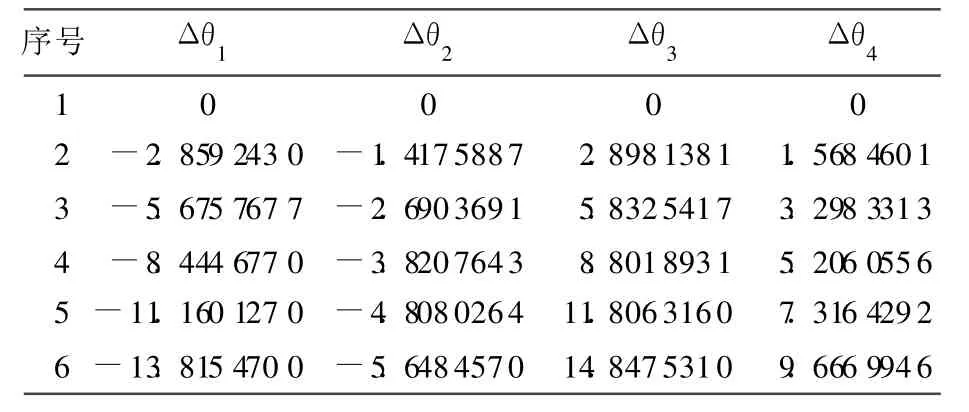
表 1 平臺平動 Δx=Δy=2.5mm,Δb=0時各輸入角位移 (°)
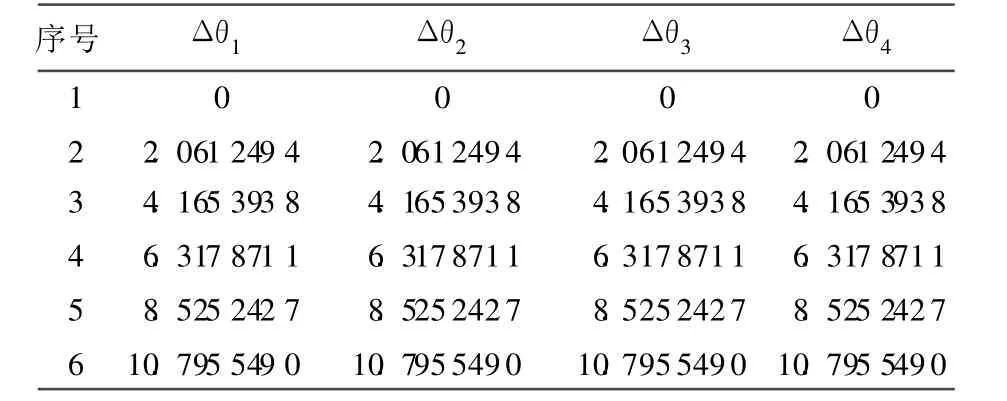
表 2 平臺純轉(zhuǎn)動 Δx=Δy=0,Δb=5°時各輸入角位移 (°)
機構(gòu)運動位形圖如圖 5和圖 6所示.將式(3)兩邊對時間求導,可得到機構(gòu)的速度方程為

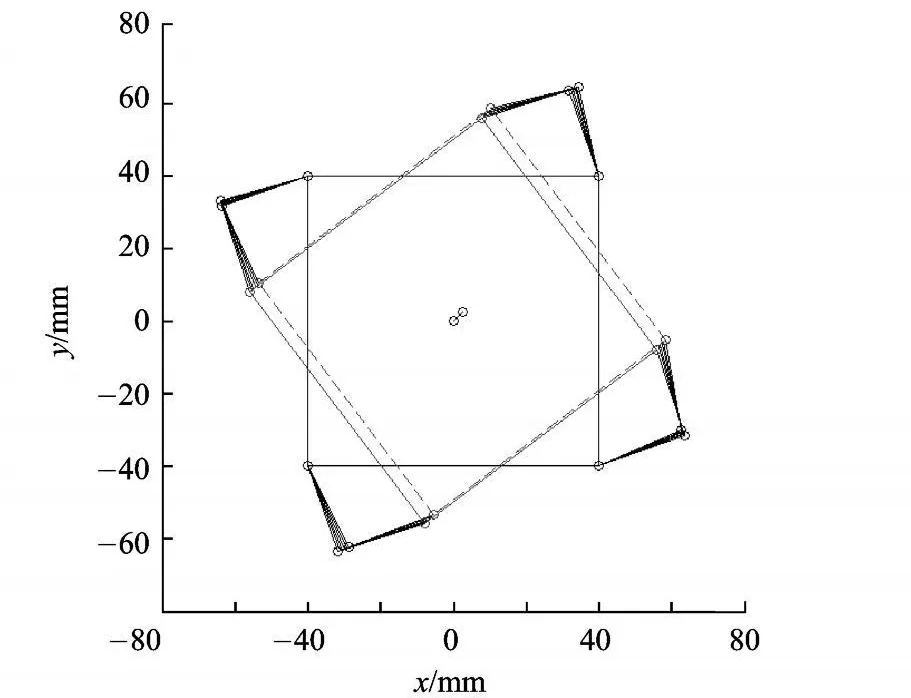
圖5 動平臺平動時機構(gòu)位形圖

圖6 動平臺純轉(zhuǎn)動時機構(gòu)位形圖
在完成上述機構(gòu)運動學位置逆解問題后,可以由方程(4)得到機構(gòu)速度正解方程,其中 Jacobian矩陣為

其條件數(shù)可以用來優(yōu)化機構(gòu)的力傳遞性能.
3 機構(gòu)力傳遞性能優(yōu)化
機構(gòu) Jacobian矩陣的條件數(shù)為

可以證明矩陣 J的條件數(shù) 0≤cond≤1,同時可用于評價機構(gòu)的局部運動傳遞能力和力傳遞能力,機構(gòu)在對應(yīng)于 σmin的方向上的運動傳遞能力和力傳遞能力很差[3].因此,優(yōu)化機構(gòu)的結(jié)構(gòu)參數(shù),使機構(gòu)在全工作空間中雅可比矩陣的條件數(shù)均最大化是機構(gòu)優(yōu)化設(shè)計目標.為此構(gòu)造如下優(yōu)化模型:
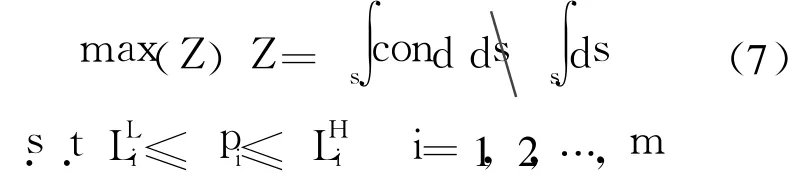
式中,s為整個工作空間;pi為待優(yōu)化的機構(gòu)參數(shù);分別為 pi的取值下界和上界.采用遺傳算法搜索[4]可得到機構(gòu)參數(shù)的優(yōu)化結(jié)果為 C=H=80mm,a=b=25mm,動平臺初始轉(zhuǎn)角 β0=82°.將其做成柔性機構(gòu),其外形、實物照片分別如圖7、圖 8所示 .
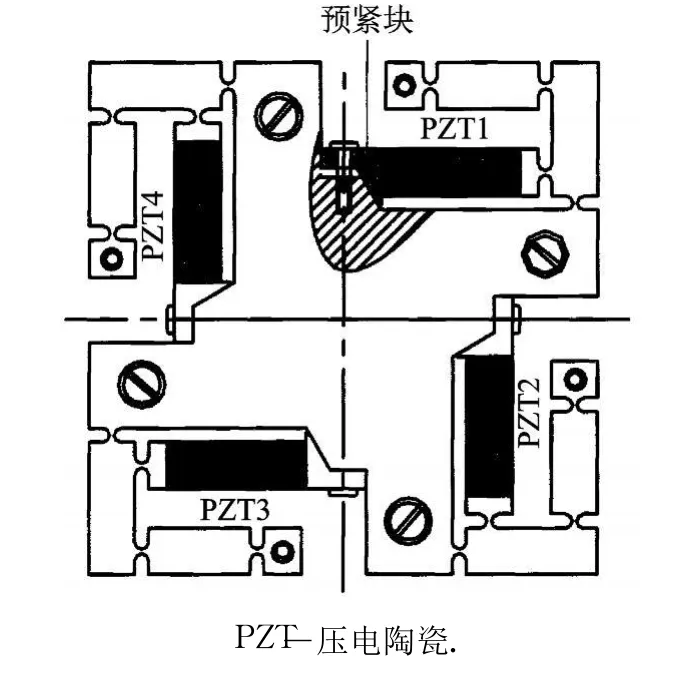
圖7 4RRR全柔性機構(gòu)
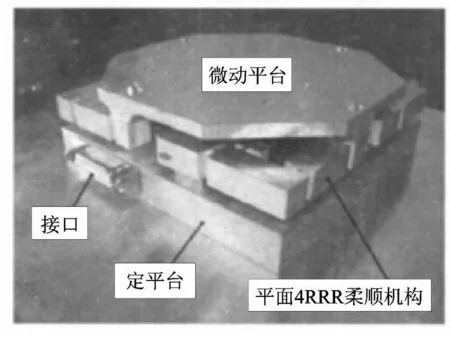
圖8 4RRR全柔性機構(gòu)裝置實物照片
4 結(jié) 論
采用冗余驅(qū)動的并聯(lián)全柔性機構(gòu)可以滿足MEMS系統(tǒng)微位移和精確定位的要求.所需的輸入角位移和驅(qū)動力可以由壓電陶瓷驅(qū)動器提供.存在多余分支的冗余驅(qū)動并聯(lián)機構(gòu)在機構(gòu)參數(shù)相同的條件下,不同拓撲結(jié)構(gòu)具有不同的運動性能.對于結(jié)構(gòu)全對稱的平面 4分支 3自由度并聯(lián)冗余驅(qū)動機構(gòu)而言,各支鏈旋轉(zhuǎn)方向相同時具有最佳的運動學和力學各向同性特征.為進一步提高冗余驅(qū)動并聯(lián)機構(gòu)的運動性能,以全局運動學性能評價指標進行了優(yōu)化,提出的優(yōu)化數(shù)學模型和優(yōu)化方法可用于其他冗余驅(qū)動并聯(lián)機構(gòu)的優(yōu)化設(shè)計.
References)
[1]Her I,Midha A.A compliance number concept for compliant mechanisms,and type synthesis[J].ASME Journal of Mechanisms,Transmissions,and Automation in Design,1987,109(3):348-355
[2]范春輝.全柔性機構(gòu)的優(yōu)化設(shè)計和實驗研究[D].北京:北方工業(yè)大學機械電子工程學院,2006 Fan Chunhui,Research on optimizing design and experiment of fully compliant mechanism[D].Beijing:College of Mechanical Electronical and Engineering,North University of Technology,2006(in Chinese)
[3]何廣平,譚曉蘭,張向慧,等.平面全柔性 3-DOF過驅(qū)動并聯(lián)機構(gòu)的最優(yōu)綜合 [J].機器人,2006,28(6):623-635 He Guangping,Tan Xiaolan,Zhang Xianghui,et al.Optimal synthesis of a planar 3-DOF over actuated full-compliant parallel mechanism[J].Robot,2006,28(6):623-635(in Chinese)
[4]陳國良,王煦法,莊鎮(zhèn)泉,等.遺傳算法及其應(yīng)用[M].北京:人民郵電出版社,1996 Chen Guoliang,Wang Xufa,Zhuang Zhenquan,et al.Genetic algorithm and application[M].Beijing:Posts&Telecom Press,1996(in Chinese)
[5]Fimani F,Podhorodeski R P.Force-unconstrained poses for a redundantly-actuated planar parallel manipulator[J].Mechanism and Machine Theory,2004,39(5):459-476
[6]溫詩鑄.關(guān)于微機電系統(tǒng)的研究[J].中國機械工程,2003,14(2):151-163 Wen Shizhu.Researches on the micro-electromechanical system[J].China Mechanical Engineering,2003,14(2):151-163(in Chinese)
[7]周兵,仲昕,楊汝清.平面三自由度并聯(lián)冗余機構(gòu)的位置和工作空間分析[J].湖南大學學報:自然科學版,2002,29(2):52-57 Zhou Bing,Zhong X in,Yang Ruqing.Displacement and workspace analysis of 3-d of planar parallel tedundant robot[J].Journal of Hunan University:Natural Science,2002,29(2):52-57(in Chinese)
[8]Merlet JP.Direct kinematics of planar parallel manipulators[C]∥Proceedings of the 1996 IEEE International Conference on Robotics and Automation.Minneapolis,Minnesota:ICRA,1996
(編 輯:劉登敏)
Micro-material-test mechanism oriented precision technique
Lu Zhen
(School of Automation Science and Electrical Engineering,Beijing University of Aeronautics and Astronautics,Beijing 100191,China)
Chen Xuedong
(School of Mechanical Science and Engineering,Huazhong University of Science and Technology,Wuhan 430074,China)
He Guangping
(College of Mechanical Electronical Engineering,North University of Technology,Beijing 100144,China)
Micro electromechanical systems(MEMS)have vast vistas of application in the aeronautics,astronautics,automobile,bioengineering,environmental management,military,etc.However,the material tests are the bottleneck of the property test for MEMS.That is concerned with subtle motion,precision location,and the measurement of tiny load/displacement.Traditional mechanical manufacture is helpless for the mission duo to friction,clearance,crawl,and error-accumulation of multi-trans mission.For this reason,a new type of the redundantly actuated compliant parallel mechanism with piezoelectric actuators was proposed.Based on the inverse kinematics of the redundantly actuated compliant parallel mechanism,and by means of optimum topology,kinematical analysis,and dynamical optimization,the key dimensions of the mechanism were determined.The experiment demonstrates the mechanism is capable in the subtle motion,precision location,and the measurement of tiny load/displace ment for the MEMS material test.
micro electromechanical systems;redundantly actuated;compliantmechanism.
TP 242
A
1001-5965(2010)03-0328-05
2009-03-02
國家重點實驗室開放基金資助項目
陸 震(1942-),男,江蘇無錫人,教授,zhenluh@buaa.edu.cn.
猜你喜歡
房地產(chǎn)導刊(2022年5期)2022-06-01 06:20:14
能源工程(2022年1期)2022-03-29 01:06:28
建材發(fā)展導向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導向(2021年7期)2021-07-16 07:07:52
中學生數(shù)理化(高中版.高二數(shù)學)(2021年12期)2021-04-26 07:43:48
中學生數(shù)理化(高中版.高考數(shù)學)(2021年12期)2021-03-08 01:28:50
今日農(nóng)業(yè)(2020年16期)2020-12-14 15:04:59
消費導刊(2018年8期)2018-05-25 13:20:08
家庭影院技術(shù)(2018年4期)2018-05-09 07:07:41
電子制作(2017年20期)2017-04-26 06:57:45