舵面電動加載系統的自適應 CMAC復合控制
2010-03-16 09:21:36楊波王哲
北京航空航天大學學報 2010年3期
關鍵詞:系統
楊 波 王 哲
(北京航空航天大學 自動化科學與電氣工程學院,北京 100191)
舵面電動加載系統的自適應 CMAC復合控制
楊 波 王 哲
(北京航空航天大學 自動化科學與電氣工程學院,北京 100191)
針對無人機舵面電動加載系統具有非線性及多余力矩的特點,提出了一種自適應 CMAC(Cerebellar Model Articulation Controller)神經網絡與自適應神經元控制器并聯構成復合控制結構.該控制策略以系統的指令輸入和實際輸出作為 CMAC的激勵信號,以系統的當前控制誤差作為 CMAC的訓練信號.提出了利用誤差在線自適應調整學習率的方法,消除了常規前饋型 CMAC的過學習和不穩定現象.建立了無人機舵面電動加載系統的數學模型,給出了具體的控制結構和算法.仿真結果表明:該方法有效抑制了加載系統的多余力矩,增強了系統的穩定性,明顯改善了舵面電動加載系統的動態性能.
舵面電動加載系統;多余力矩;小腦模型關聯控制器神經網絡;自適應控制;自適應神經元;學習率
舵面電動加載系統用于實驗室條件下無人機舵機的負載模擬試驗,以檢測和考核舵機系統在實際負載條件下的控制律、動態性能、系統可靠性等.對于無人機而言,舵面載荷相對較小,所以通常采用電動加載系統.
舵面電動加載系統存在著由于被加載系統的主動運動引起的多余力矩.多余力矩會影響加載系統的控制精度、帶寬和穩定性,因此如何抑制乃至消除多余力矩是舵面電動加載系統必須解決的關鍵問題.工程中通常采用結構不變性原理來抑制多余力矩,但在實際的舵面電動加載系統中,存在非線性(如摩擦、機械連接間隙等)以及參數變化問題,采用該方法往往達不到理想效果[1].
小腦模型關聯控制器(CMAC,Cerebellar Model Articulation Controller)是一種采用局部學習結構的神經網絡,具有結構簡單、有一定的泛化能力和學習速度快等優點,適合于實時控制.但CMAC網絡結構的設計目前理論指導較少,這給其設計和推廣帶來了難度.目前常用的是 CMAC的前饋控制和固定增益反饋 PD(Proportional-Derivative)控制器相結合的復合控制,但在跟蹤連續變化的信號時,誤差累積的影響會使 CMAC產生過學習現象,導致系統不穩定[2].基于 CMAC的控制系統穩定性與學習率取值密切相關,如學習率選取不當,會導致控制系統不穩定或者收斂速度很慢[3].而固定增益反饋控制器的大小也影響著系統的穩定性和抗干擾能力[4].文獻[5]提出了采用線性神經元控制器實現固定增益的自適應調節,使系統的品質得到了改善.
本文根據舵面電動加載系統的實際應用情況,提出了一種基于 CMAC神經網絡的自適應控制器,仿真結果表明了本方法的有效性.
1 舵面電動加載系統數學模型
為盡可能真實模擬飛機舵面在不同飛行任務中承受的載荷情況,舵面電動加載系統往往是多通道并行系統,由于各通道之間彼此獨立,因此對單通道加載系統進行數學建模.力矩電機作為主要載荷模擬設備,通過聯軸器與力矩傳感器相連,再通過搖臂、拉桿和舵機搖臂將載荷施加到舵機軸上.
舵面電動加載系統是以轉矩為被控量的直流電機伺服系統,采用脈沖寬度調制驅動裝置,產生大功率電流驅動直流力矩電機對被加載對象加載,加載系統通過連接機構與承載舵機相連,對其加載并隨之在一定角度內進行往復運動[6].
直流電機的電壓平衡方程為

電機反電勢為

其中

電磁轉矩可表示為

電機轉矩為

式中,Ua,Ea,Ia分別為力矩電機電樞電壓、反電動勢和電樞電流;KE,KT分別為力矩電機的反電動勢系數和轉矩系數;Ra,La分別為電樞的電阻和電感;Ωm,θm分別為電機的角速度和角位移;Bm,Jm分別為電機的轉矩系數和轉動慣量.
由式(1)~式(5),可得電機的傳遞函數:
不考慮轉矩傳感器的扭轉剛度,認為電機軸和負載是剛性連接,承載對象可看成是慣性負載,其粘性阻尼系數近似為零.
系統的力矩平衡方程如下:
式中,JL為被加載對象端負載的轉動慣量;KL為被加載對象端負載的扭轉剛度;Ωf為被加載對象端的角速度;θf為被加載對象端的角位移.聯立式(6)~式(8)可得加載系統的傳遞函數:

其中
由式(9)可以看出分子第 2項實際上是強位置干擾量產生的力矩,即所謂的多余力矩.
2 自適應 CMAC控制器
2.1 自適應 CMAC結構和算法
CMAC-PD復合控制器通過 CMAC實現前饋控制,確保系統的響應速度,減少超調量.常規 PD算法實現反饋控制,以保證系統的穩定性,抑制擾動.
通過仿真實驗發現,傳統的 CMAC-PD控制,系統在維持相當長時間的穩定后,會產生過學習現象導致突然崩潰.為了提高系統的穩定性和抗干擾能力,對 CMAC神經網絡控制器的結構進行了改進,改進后的結構如圖 1所示.
該控制器與常用的前饋-反饋復合控制結構類似,但它采用二維輸入,以系統的給定信號r(k)和實際輸出信號 y(k)作為 CMAC的輸入.

圖1 自適應 CMAC神經網絡復合控制器結構
常規的復合控制采用 PID(Proportional Integral Differential)控制器的輸出作為調整權值學習的訓練信號,CMAC學習的是被控對象的逆動態模型.而改進后的復合 CMAC-PD控制結構采用的是系統的跟蹤誤差 e(k)作為調整權值學習的訓練信號,因此 CMAC實現的不僅僅是被控對象的逆動態模型,而且是包括了常規反饋控制器在內的整個系統的逆動態模型.另外在學習算法中,本文提出了一種變學習率的方法,根據誤差的大小進行自適應在線調節,可以有效地消除傳統的控制結構中,由于 PD控制器和 CMAC在學習中產生沖突,導致系統不穩定的現象.為了進一步提高系統的控制精度和穩定性,用自適應神經元控制器取代常規的 PD固定增益控制器,它能根據控制系統的動態特性優化 CMAC的自學習控制,使其能適應各種系統工況的變化,從而提高系統的控制品質.
基于 CMAC自適應控制器的控制算法如下:
1)設置聯想單元個數、泛化參數和量化參數;
2)初始化參數,CMAC聯想單元的權值均為零;
3)根據式(14)對 r(k)和 y(k)進行量化:

式中,round為取整函數;xmax和 xmin分別為輸入 x的最大值和最小值;M為 xmax對應的量化值;
4)在 CMAC中找到與之對應的 C個單元,并將這 C個單元的權值相加,得到 CMAC的輸出:

式中,wi(k)為 CMAC第 k次的權值;ai(k)為二進制選擇向量;C為 CMAC網絡的泛化常數;
5)將 CMAC輸出值和自適應網絡神經元控制器的輸出 un(k)相加,得到被控對象總的控制輸入,即

6)用 e(k)作為訓練信號,調整聯想單元中的權值大小,進入學習過程,權值調整規則為
式中,η(1-e-α|e(k)|)為改進后的 CMAC神經網絡的學習率,η為常數且 η∈(0,1),1-e-α|e(k)|為學習率比例因子.η(1-e-α|e(k)|)隨著 e(k)的減小呈指數衰減,當 e(k)較小時,較小的 η(1-e-α|e(k)|)可以抑制累積誤差的影響所導致系統的不穩定性,而 e(k)較大時,較大的 η(1-e-α|e(k)|)可以加速系統的收斂.α為平衡常數,用來協調系統的穩定性和收斂速度.對于常規CMAC而言,固定學習率無法解決穩定性和收斂速度之間的矛盾,而改進后的算法可以根據系統e(k)大小在學習過程中動態地調整 η(1-e-α|e(k)|),從而提高了系統的自適應性,有效地增強了系統的穩定性;
7)k=k+1,轉3).
2.2 自適應線性神經元控制器設計
常規 CMAC復合控制中的 PID控制采用傳統的 PD算法而不是 PID算法,目的是使 CMAC的學習僅依賴于誤差當時的測量值及變化值.為不改變原有常規固定增益控制器的結構,自適應線性神經元控制器的具體結構如圖 2所示.

圖2 自適應線性神經元結構
控制器的輸出為
式中,w1(k)和 w2(k)為神經元的權重,分別對應常規 PD控制器的比例和微分調節系數 Kp和 Kd;x1(k)和 x2(k)為神經元輸入信號,分別對應給定的誤差和誤差變化量.取性能指標函數:

用梯度下降法來修正網絡的權系數,即按E(k)對加權系數的負梯度方向搜索調整:
綜上所述,本文提出的復合控制通過學習率自適應調整的 CMAC來協調系統動態性能和穩態性能之間的矛盾,它與自適應神經元控制器一同提高了系統的穩定性和抗干擾能力,從而改善了系統的控制性能.
3 仿真結果及分析
為了驗證自適應 CMAC控制器控制策略的有效性,需要進行對比仿真分析.將舵面電動加載系統的相關參數 Jm=0.01kg·m2,La=4.3mH,Ra=3.5Ω,KT=1.754 N· m/A,KE=2.046 V/(r·min-1)等參數代入式(9),其中常規固定增益 PD控制器參數設定為 Kp=2,Kd=0.5;CMAC的參數設定為 w1(0)=2,w2(0)=0.5,η=0.05,α=1,C=20,給定信號和實際輸出信號的量化級數 N均取 100.自適應神經元的學習速率為 β=0.001.取舵機的角速度干擾信號 yr=1.74sin(5· 2πt)rad時,未加 CMAC時多余力矩的峰值為 1.86N·m.
下面分別針對結構不變性控制,CMAC與常規固定增益 PD復合控制以及本文提出的自適應CMAC復合控制進行仿真比較.
3.1 正弦波信號的跟蹤性能仿真
取加載指令為 r(k)=10 sin(10· 2πt)N·m,對于無人機舵面電動加載系統而言,加載指令的頻率已為極限值,仿真時間取 2s.圖 3為采用結構不變性控制的仿真結果,|e(k)|幅值為1.3N·m;圖 4為 CMAC與常規 PD復合控制,圖5為自適應 CMAC控制,0.5 s后,|e(k)|幅值均收斂到 0.5 N·m左右.由此可見,采用基于CMAC控制策略的效果明顯優于結構不變性控制效果,多余力矩減小了 60%,從圖中可以看出,采用自適應 CMAC后,系統也能迅速收斂,且多余力矩等干擾對系統誤差的影響只有 5%.
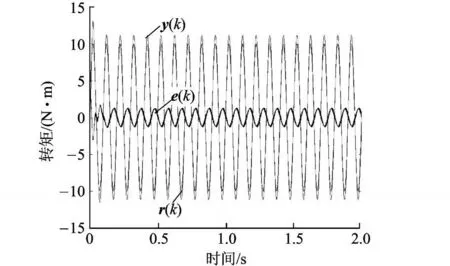
圖3 基于結構不變性原理跟蹤曲線
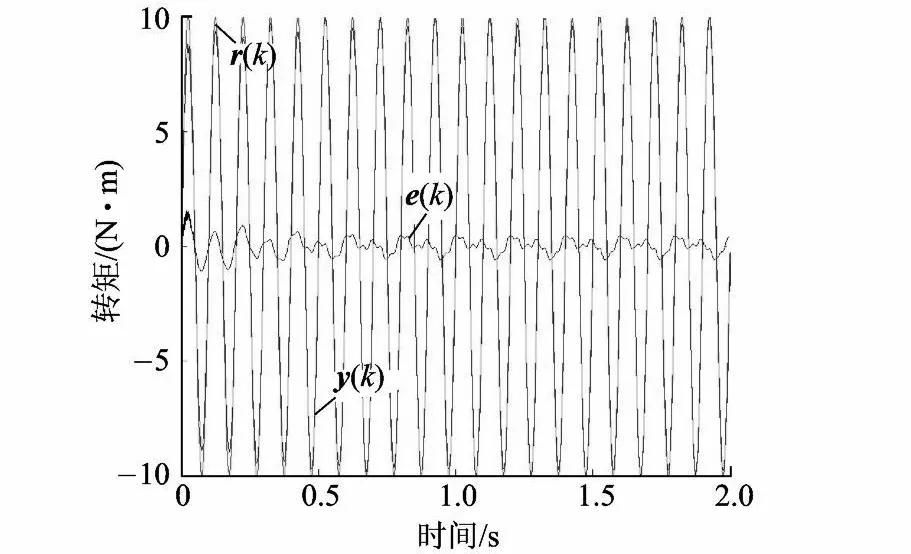
圖4 基于 CMAC與常規 PD復合控制跟蹤曲線
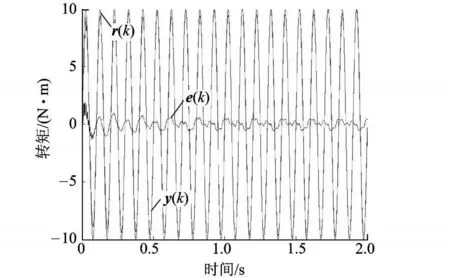
圖5 基于自適應CMAC復合控制跟蹤曲線
3.2 CMAC復合控制穩定性仿真
針對 CMAC和 PD復合控制相互作用,可能經過相當長的穩定時間,最終導致系統發散的問題,有必要測試其穩定性.
正弦波信號的取值同 3.1,將仿真時間延長為 500s,圖 6為常規 CMAC和固定增益 PD復合控制的仿真結果.可見雖然系統一開始能夠迅速收斂,但經過 85s后,就出現發散現象,而圖 7采用的自適應 CMAC復合控制在經過 500 s仿真后,|e(k)|幅值仍保持在0.4N·m左右,沒有發散的趨勢.由此可見本文提出的自適應控制器,通過自適應神經元 KP,Kd以及 CMAC控制部分學習率的在線調整,不僅使系統具有良好的動態響應性能和跟蹤連續變化信號的能力,而且有效地提高了系統的穩定性.
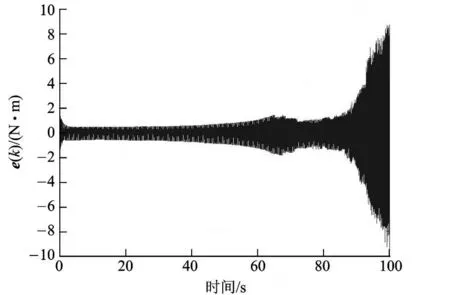
圖6 100s常規 CMAC和固定增益PD復合控制跟蹤誤差
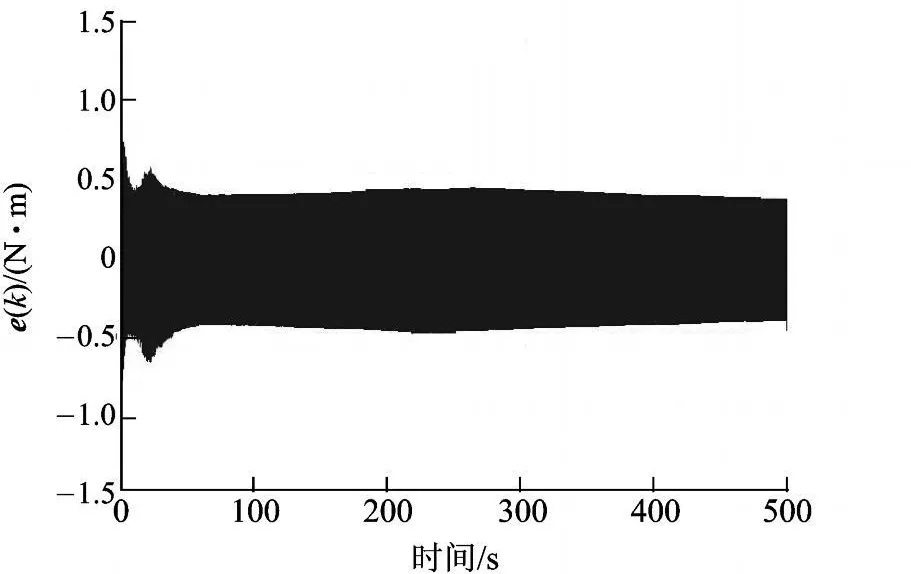
圖7 500s自適應CMAC復合控制跟蹤誤差
另外,為了驗證本文提出的變學習率公式對于系統穩定性的作用,將 1-e-α|e(k)|取為 1,η=0.05即為固定學習率,其他參數均保持不變,仿真結果如圖 8所示.雖然 500 s時由于自適應神經元控制器的作用使得系統并沒有崩潰,但它有發散的趨勢,而且時間一長對多余力矩的抑制效果不如圖 7穩定.可見學習率的大小對系統的穩定也起著很重要的作用,固定學習率時有時并不能達到理想的效果,而變學習率在線調整權值增強了系統的自適應能力,它與自適應神經元一起有效地提高了系統的穩定性.
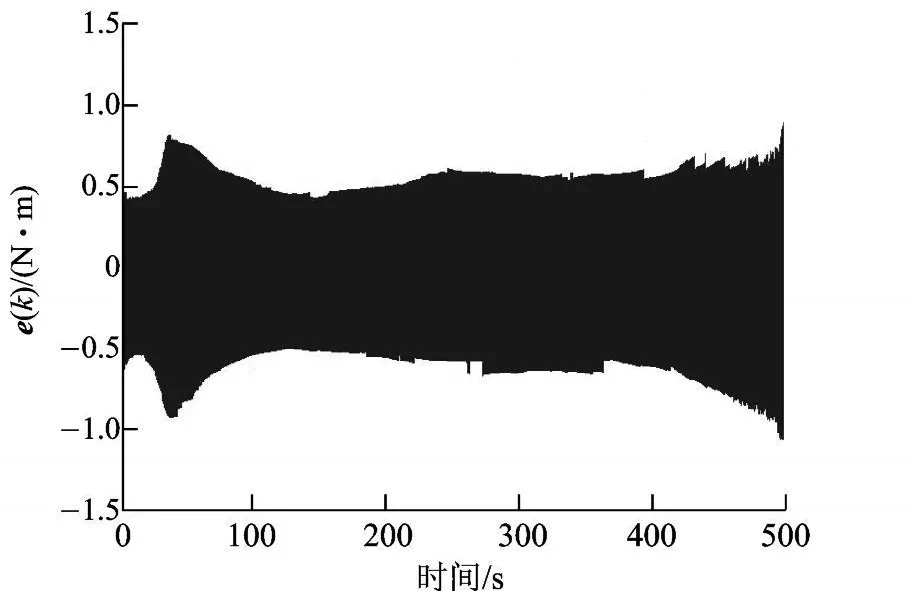
圖8 500s固定學習率的自適應CMAC復合控制跟蹤誤差
4 結 論
多余力矩嚴重影響舵面電動加載系統的動態加載性能,僅采用結構不變性原理抑制多余力矩達不到理想的效果.本文針對無人機舵面電動加載系統的特點,在常規 CMAC復合控制的基礎上,提出了一種自適應 CMAC神經網絡控制器,該控制器以給定信號和實際輸出信號為 CMAC的激勵信號,以系統誤差作為訓練信號,在線調整學習率的大小并與自適應神經網絡控制器相結合構成系統的復合控制.仿真結果表明:該方法既彌補了結構不變性原理的不足,明顯抑制了多余力矩,又能保證系統的長期穩定性,從而有效地改善了系統的動態加載性能.相比于其他類型的神經網絡控制,計算量小,非常適合于在線實時控制,對舵面電動加載系統的設計具有很大的參考價值.
References)
[1]任志婷,焦宗夏.小轉矩電動式負載模擬器的設計[J].北京航空航天大學學報,2003,29(1):91-94 Ren Zhiting,Jiao Zongxia.Design of motor-drive load simulator with smalltorque outputs[J].Journal of Beijing University of Aeronautics and Astronautics,2003,29(1):91-94(in Chinese)
[2]蔣志明,林廷圻,黃先祥.一種基于 CMAC的自學習控制器[J].自動化學報,2000,26(4):542-545 Jiang Zhiming,Lin Tingqi,Huang Xianxiang.A new self-learning controller based on CMAC neural network[J].Acta Automatica Sinica,2000,26(4):542-545(in Chinese)
[3]林旭梅,梅濤.一種基于自適應遺傳算法的 CMAC的學習率優化研究[J].系統仿真學報,2005,17(12):3081-3088 Lin Xumei,Mei Tao.A kind of optimization based on adaptive GA for cerebellar model articulation[J].Journal of System Simulation,2005,17(12):3081-3088(in Chinese)
[4]何超,徐立新,張宇河.CMAC算法收斂性分析及泛化能力研究[J].控制與決策,2001,16(5):523-529 He Chao,Xu Lixin,Zhang Yuhe.Convergence and generalization ability of CMAC[J].Control and Decision,2001,16(5):523-529(in Chinese)
[5]李輝.一種自適應 CMAC神經網絡控制器的設計與仿真[J].2005,17(9):2233-2235 Li Hui.Design and simulation of adaptive CMAC controller[J].2005,17(9):2233-2235(in Chinese)
[6]楊波,王俊奎.基于改進的 CMAC的電動加載系統復合控制[J].航空學報,2008,29(5):1315-1318 Yang Bo,Wang Junkui.Hybrid control based on improved CMAC for motor-driven loading system[J].Acta Aeronautica et Astronautica Sinica,2008,29(5):1315-1318(in Chinese)
(編 輯:劉登敏)
Adaptive CMAC hybrid control for rudder electric loading system s
Yang Bo Wang Zhe
(School of Automation Science and Electrical Engineering,Beijing University of Aeronautics and Astronautics,Beijing 100191,China)
Aiming at the nonlinearity and the surplus torque in rudder electric loading systems of unmanned aerial vehicle(UAV),aself-adaptive cerebellar modelarticulation controller(CMAC)was proposed,which was parallel to an adaptive neuron controller.This hybrid control strategy adopted the desired value and the actual out put as the incentive signals of CMAC,and put the current system error as the training signal of CMAC.The method was proposed by using the error to adjust the learning rate on line,which eliminated the excess self-learning phenomena.The mathematical model of rudder electric loading systems for UAV was established and the detailed control structure was put forward.Simulation results show that the proposed hybrid controller can effectively eliminate the surplus torque,enhance the control stability of the systems and fairly improve the dynamic loading performances of the systems,which is highly suitable for real-time control of nonlinear systems.
rudderelectric loading systems;surplus torque;neural cerebellar model articulation controller network;self-adaptive control;self-adaptive neurons;learning rate
TP 273
A
1001-5965(2010)03-0333-05
2009-03-02
楊 波(1972-),女,四川廣安人,副教授,boyang@buaa.edu.cn.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32