監(jiān)聽時間對聲納浮標陣檢查性搜索效能影響仿真
2010-03-24 13:42:00叢紅日王光源
海軍航空大學(xué)學(xué)報 2010年6期
袁 杰,叢紅日,李 琰,王光源
(1.海軍裝備部軍械保障部,北京 100841;2.海軍航空工程學(xué)院指揮系,山東 煙臺 264001;3.91917部隊,北京 100036)
聲納浮標通常需要組成聲納浮標陣才能有效地進行搜索。影響聲納浮標陣搜索效能的因素非常復(fù)雜,其中,監(jiān)聽時間是影響聲納浮標陣搜索效能的關(guān)鍵因素。目前,在作戰(zhàn)或訓(xùn)練過程中,還沒有科學(xué)確定聲納浮標陣監(jiān)聽時間的方法,制約了聲納浮標陣作戰(zhàn)效能的發(fā)揮。本文試圖通過采用蒙特卡洛法進行仿真研究來解決這一問題。
對于聲納浮標陣的搜索來說,搜索概率是其核心效能指標。聲納浮標陣的搜索概率P搜索是指:在搜索區(qū)內(nèi)如果存在潛艇,則通過搜索能夠發(fā)現(xiàn)目標潛艇的概率[1]。
1 仿真模型建立
1.1 典型條件
由于影響聲納浮標陣搜索效能的因素非常復(fù)雜,為了便于進行仿真研究,有必要設(shè)定一定的典型條件。
1)作戰(zhàn)樣式為檢查性反潛。
不同作戰(zhàn)樣式下,由于作戰(zhàn)條件不同,即使是完全相同的聲納浮標陣,其搜索效能也存在很大差異。因此,研究聲納浮標陣的搜索效能,必須針對具體的作戰(zhàn)樣式。
與其他作戰(zhàn)樣式相比,檢查性反潛時偶然因素對作戰(zhàn)的影響最小,制約條件也最少。因此,以檢查性反潛作為背景來研究聲納浮標陣的搜索效能,就可以盡可能地忽略偶然因素的影響,從而突出主要因素的影響[2]。
2)搜索區(qū)為長方形區(qū)域。
根據(jù)檢查性搜索的特點,搜索區(qū)一般設(shè)為方形、圓形等規(guī)則形狀。這里設(shè)定為最常用、最典型的長方形搜索區(qū),其邊長分別為L1和L2。
3)聲納浮標陣陣型為方形陣。
聲納浮標陣陣型對其搜索效能有重要影響[3]。方形聲納浮標陣是一種最簡單的包圍型浮標陣,在檢查性反潛中廣泛應(yīng)用[2]。由于搜索區(qū)為長方形區(qū)域,因此,這里設(shè)定為與之相對應(yīng)的長方形聲納浮標陣。
長方形聲納浮標陣沿長方形搜索區(qū)域的內(nèi)沿均勻布設(shè)。
4)先布設(shè)后監(jiān)聽聲納浮標陣。
使用聲納浮標陣搜索包括布設(shè)和監(jiān)聽兩個方面。主要有兩種方式:先布設(shè)后監(jiān)聽和邊布設(shè)邊監(jiān)聽[1]。
采用先布設(shè)后監(jiān)聽聲納浮標陣的方式,可以把作戰(zhàn)過程區(qū)分為布設(shè)浮標陣和監(jiān)聽浮標陣兩個獨立的階段,有利于集中研究監(jiān)聽對聲納浮標陣搜索效能的影響。
5)搜索區(qū)內(nèi)存在目標潛艇。
本假設(shè)純粹是為了研究的方便。
6)目標潛艇的初始位置和航行狀態(tài)未知,但確定在進行檢查性搜索時,目標潛艇的初始位置和航行狀態(tài)都是未知的。
基于檢查性反潛的特點,假設(shè)目標潛艇的初始位置和航向均服從均勻分布,且不中途改變航行狀態(tài)[4]。
1.2 基準時間的確定
以開始對聲納浮標陣進行監(jiān)聽的時刻為基準時間t0,這樣,目標潛艇運動的時間和監(jiān)聽聲納浮標陣的時間就可以統(tǒng)一表示。
1.3 坐標系建立及搜索區(qū)域、浮標陣位置表示
坐標系建立應(yīng)綜合考慮搜索區(qū)域、聲納浮標陣、目標潛艇位置表示的需要,以方便研究問題為原則。
以長方形搜索區(qū)的任意一個頂點為坐標原點,以與該點相鄰的兩條邊的方向為坐標軸建立平面直角坐標系。
使用該坐標系,就可以方便地表示檢查性搜索區(qū)域。而根據(jù)設(shè)定的條件,聲納浮標陣在搜索區(qū)域中的位置也可以方便地表示出來。如圖1所示。
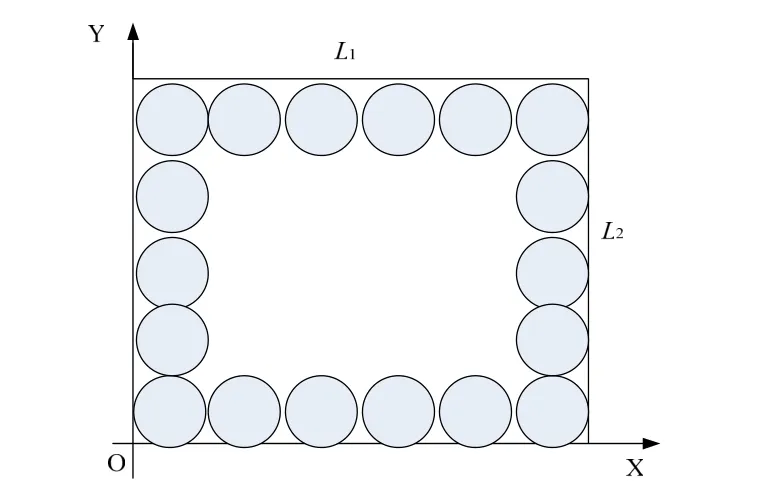
圖1 搜索區(qū)域及浮標陣位置示意圖
1.4 聲納浮標位置表示
理論上講,搜索區(qū)域的位置和大小、聲納浮標陣在搜索區(qū)域中所處的位置、聲納浮標有效探測距離D浮聲、聲納浮標陣內(nèi)各聲納浮標之間的間距 d浮聲確定后,組成聲納浮標陣的聲納浮標的數(shù)量N浮聲以及各枚聲納浮標的位置(xn,yn)也就惟一的確定了。
但這樣確定的聲納浮標的位置只是理論位置。而在實際作戰(zhàn)過程中,由于直升機定位精度、機組訓(xùn)練水平等方面的原因,每枚聲納浮標不可能準確布設(shè)于其理論位置,必然會存在一定誤差。此外,聲納浮標布設(shè)后,由于受到氣象水文條件的影響,其位置還會產(chǎn)生漂移,這也會產(chǎn)生位置誤差。
設(shè)每枚聲納浮標的實際位置為(x實n,y實n),平均誤差為ω,則根據(jù)誤差理論,聲納浮標位置服從以(xn,yn)為均值、以ω為均方差的正態(tài)分布。則對于每枚聲納浮標都可以使用服從該正態(tài)分布的隨機數(shù)來生成位置誤差。
設(shè)隨機數(shù)ω1和ω2相互獨立,且均服從以0為均值以ω為均方差的正態(tài)分布,則:

1.5 目標潛艇位置表示
1)目標潛艇初始位置生成。
目標潛艇初始位置就是在基準時間t0時目標潛艇所處的位置。根據(jù)檢查性反潛的特點,一般假設(shè)目標潛艇的初始位置在檢查性搜索區(qū)內(nèi)服從均勻分布[5]。
設(shè)ξ1和ξ2為相互獨立的2個隨機數(shù),ξ1和ξ2均服從均勻分布,且0≤ξ1≤1、0≤ξ2≤1,則目標潛艇初始位置坐標 (x0,y0)可以表示為:

2)目標潛艇航向生成。
檢查性搜索時,一般也假設(shè)目標潛艇的航向服從均勻分布。由于方向在平面坐標中是一維的,只需要一個隨機數(shù)即可。設(shè)該隨機數(shù)為ξ3,服從均勻分布,且0≤ξ3≤1,則目標潛艇的航向與x軸之間的夾角θ可以表示為:

3)目標潛艇航速生成。
目標潛艇通常以小噪聲航速航行。設(shè)目標潛艇的最小小噪聲航速為v潛小,目標潛艇的最大小噪聲航速為v潛大,則一般認為目標潛艇的實際航速v潛在v潛小和v潛大之間服從均勻分布[6]。
設(shè)隨機數(shù)ξ4服從均勻分布,且0≤ξ4≤1,則v潛可以表示為:

4)目標潛艇運動方程。
基于假設(shè),目標潛艇的運動方程為:

式中,t為從t0時刻開始目標潛艇的航行時間,也是監(jiān)聽聲納浮標陣的時間。
使用上述運動方程,就可以計算出任意時刻目標潛艇位置的坐標(x潛,y潛)。
1.6 聲納浮標陣搜潛機理分析
聲納浮標陣能夠搜索到目標潛艇,必須具備3個方面的條件:一是目標潛艇能夠進入到聲納浮標陣的有效搜索范圍;二是聲納浮標能夠可靠工作;三是聲納員能夠有效進行監(jiān)聽[7]。顯然,這3個方面的條件之間是相互獨立的。
設(shè):目標潛艇進入聲納浮標陣有效搜索區(qū)域的概率為P進入,聲納浮標的可靠性為P可靠,當目標潛艇已經(jīng)進入到聲納浮標陣有效搜索區(qū)域范圍之內(nèi)且聲納浮標能可靠工作時能夠監(jiān)聽到目標潛艇的概率為P監(jiān)聽,則:

1.7 仿真模型建立方法
上面所建立的只是聲納浮標陣搜索效能的理論模型。但在實際仿真時,采用基于蒙特卡洛方法的仿真模型[8]。
由于以t 對P搜索的影響為研究對象,因此,采用按時間步長推進的仿真方法[9]。以t0為基準時間,采用下面的判別方法對聲納浮標陣能否搜索到目標潛艇進行判別。如果在當前時刻沒有搜索到敵潛艇,則按選定的時間步長繼續(xù)推進到下一個時刻進行判別,直至搜索到目標潛艇或達到規(guī)定的最大搜索時間;如果搜索到目標潛艇,則本次仿真過程結(jié)束,當前時刻的搜索成功次數(shù)加1。
重復(fù)進行上述過程直至規(guī)定的最大仿真次數(shù)。這樣,在每一時刻,都累積了一定數(shù)量的搜索成功次數(shù),再對所有仿真結(jié)果進行統(tǒng)計分析,就可得出到當前時刻為止的搜索概率。
1.8 搜索效果判別
1)目標潛艇能否進入聲納浮標陣有效搜索范圍。
目標潛艇進入聲納浮標陣的有效搜索范圍,也就是進入組成聲納浮標陣的至少一枚聲納浮標的有效搜索范圍。
當聲納浮標陣布設(shè)完成后,如果不考慮聲納浮標的漂移,則在監(jiān)聽過程中,可以認為每枚聲納浮標的位置 (x 實n,y實n)是固定的。但目標潛艇一般處于持續(xù)的運動過程中,其位置(x潛,y潛)時刻發(fā)生改變。
每枚聲納浮標的有效搜索范圍都是以(x 實n,y實n)為圓心以D浮聲為半徑的圓形區(qū)域。因此,在任意時刻,只要依次計算目標潛艇當前位置點與每枚聲納浮標之間的距離dn:

2)聲納浮標能否可靠工作。
P可靠包括布設(shè)時的成活率和布設(shè)成活后的可靠性兩個方面。如果布設(shè)時沒有成活一般會補充布設(shè),所以一般只需考慮第二個方面的因素。
P可靠主要取決于裝備性能、戰(zhàn)場環(huán)境,與使用時間也有關(guān)系。但由于與本文的研究關(guān)系不密切,這里不展開討論,而是合理地給出一個固定值。
仿真時使用隨機數(shù)來進行判別。設(shè)隨機數(shù)ξ5服從均勻分布,且0≤ξ5≤1,則:當ξ5<P可靠時,認為聲納浮標可靠工作;而當ξ5≥ P可靠時,認為聲納浮標不能可靠工作。
3)能否成功監(jiān)聽。
P監(jiān)聽表示的是監(jiān)聽能力,主要取決于裝備性能和聲納員的訓(xùn)練水平,這里也不展開討論,只是合理給出一個固定值。
仿真時也使用隨機數(shù)來進行判別。設(shè)隨機數(shù)ξ6服從均勻分布,且0≤ξ6≤1,則:當ξ6<P監(jiān)聽時,認為能監(jiān)聽到目標潛艇;而 ξ6≥ P監(jiān)聽時,認為不能監(jiān)聽到目標潛艇。
2 仿真研究
2.1 仿真想定
1)檢查性搜索區(qū)為一長方形區(qū)域,L1=××km,L2=××km。
2)使用非定向被動式聲納浮標,型號為××,D浮聲=××km。
3)d浮聲=2 D浮聲。
4)ω=100 m。
5)目標潛艇為常規(guī)動力潛艇,型號為××,v潛小=××kn,v潛大=××kn。
6)P可靠=0.95,P監(jiān)聽=0.9。
7)最大搜索時間T=4 h。
2.2 仿真程序
仿真程序框圖如圖2所示。
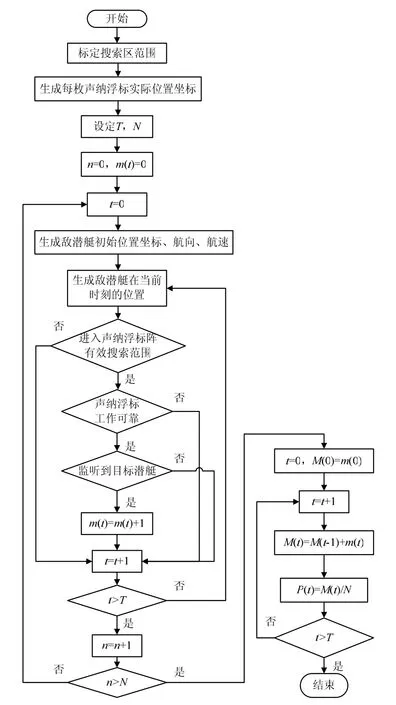
圖2 仿真程序框圖
圖2中,t、T分別表示當前監(jiān)聽時刻和最大監(jiān)聽時間;n、N分別表示當前仿真次數(shù)和最大仿真次數(shù);m(t)、M (t)分別表示某一時刻探測到目標潛艇的次數(shù)和到當前時刻為止累計探測到目標潛艇的總次數(shù);P (t)表示當前時刻的搜索概率。
仿真程序使用C++語言編程實現(xiàn)。
2.3 仿真步長與仿真次數(shù)
仿真步長和仿真次數(shù)對仿真結(jié)果的精度有重要影響。綜合考慮聲納浮標陣搜索的特點和仿真結(jié)果的需要,仿真步長設(shè)定為1 min,仿真次數(shù)均設(shè)定為10 000次。
2.4 仿真結(jié)果
仿真結(jié)果如圖3所示。
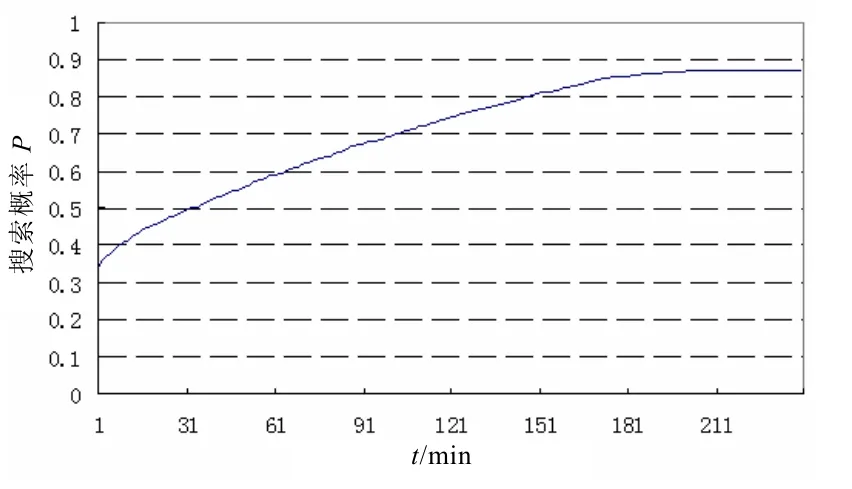
圖3 仿真結(jié)果圖
2.5 仿真結(jié)果分析
從仿真結(jié)果可以看出:
1)聲納浮標陣的搜索效能隨監(jiān)聽時間的增加而提高,與戰(zhàn)術(shù)常識及部隊的實際訓(xùn)練結(jié)果相吻合。
2)只要開始監(jiān)聽,就可以取得比較高的搜索概率,在本例中大約為0.35。當然,在實際監(jiān)聽過程中,真正監(jiān)聽到目標潛艇仍然需要花費一定時間,但這個時間通常比較短。
事實上,這個初始搜索概率是聲納浮標陣有效搜索范圍占整個搜索區(qū)面積比值的體現(xiàn),是前一個作戰(zhàn)階段即布設(shè)聲納浮標陣階段工作在搜索效能上的反映。
其戰(zhàn)術(shù)意義在于:首先,應(yīng)盡量提高聲納浮標的有效探測距離,并盡量多布設(shè)浮標,以盡可能地提高初始搜索概率;其次,初始監(jiān)聽階段非常關(guān)鍵,需要聲納員監(jiān)聽時注意力高度集中。
3)監(jiān)聽時間的增加和搜索效能的提高不是簡單的線性關(guān)系。從總體上看,隨著監(jiān)聽時間的增加,搜索效能提高的幅度逐漸降低,但表現(xiàn)得并不均勻。大致可劃分為以下3個階段:
① 快速提高期。
大致為從開始監(jiān)聽到監(jiān)聽30 min時。在最初的這段時間內(nèi),隨著監(jiān)聽時間的增加,搜索效能提高較快。至30 min時,搜索概率大約為0.5,比開始監(jiān)聽時大約提高0.15。
其戰(zhàn)術(shù)意義在于:當沒有條件長時間進行監(jiān)聽時,也能夠取得相對比較理想的搜索概率。
② 平穩(wěn)提高期。
大致的時間段為30~180 min。在這段時間內(nèi),搜索效能提高的幅度雖然有所降低,但仍然穩(wěn)步提高。總體表現(xiàn)為隨著監(jiān)聽時間的增加,搜索效能以近似于線性的方式提高。至180 min時,搜索概率提高至約0.86。
其戰(zhàn)術(shù)意義在于:如果有條件較長時間地進行監(jiān)聽,就應(yīng)適當延長監(jiān)聽時間,以取得更為理想的搜索效果。
③ 滯漲期。
大約從180 min 開始,隨著監(jiān)聽時間的增加,搜索效能提高的幅度很小,可以忽略不計。
其戰(zhàn)術(shù)意義在于:如超過了一定監(jiān)聽時間(本例中大約為180 min),則很難依靠增加監(jiān)聽時間的方法來進一步提高搜索效能。此時,聲納員已經(jīng)非常疲勞,聲納浮標的可靠性也會下降,甚至?xí)^聲納浮標的有效工作時間,這進一步降低了搜索效能提高的可能性。如果需要進一步提高搜索效能,則需要采取增加浮標數(shù)量、改變陣型等其他方法。
3 結(jié)束語
本文以方形聲納浮標陣檢查性反潛為背景,通過分析聲納浮標陣的作戰(zhàn)機理,建立了其搜索效能的仿真模型,研究了監(jiān)聽時間對聲納浮標陣搜索效能的影響,給出了仿真結(jié)果并對其進行了分析。
仿真結(jié)果表明:聲納浮標陣的搜索效能隨著監(jiān)聽時間的增加而提高,但呈現(xiàn)出比較明顯的非線性特征。因此,應(yīng)根據(jù)作戰(zhàn)條件和作戰(zhàn)要求合理確定監(jiān)聽時間,以提高兵力的使用效率,取得理想的搜索效果。
[1]孫明太.航空反潛戰(zhàn)術(shù)[M].北京∶軍事科學(xué)出版社,2003∶86-99.
[2]叢紅日.航空反潛戰(zhàn)術(shù)[M].煙臺∶海軍航空工程學(xué)院,2008∶32-52.
[3]楊日杰,王正紅,周旭,等.浮標陣型對搜索效能影響的研究[J].計算機仿真,2009,26(12)∶16-20.
[4]屈也頻,廖瑛.潛艇位置散布規(guī)律與搜潛效能評估模型研究[J].系統(tǒng)仿真學(xué)報,2008,20(12)∶3280-3283.
[5]董文洪,楊日杰,田寶國.航空搜潛聲納浮標位置計算方法研究[J].測試技術(shù)學(xué)報,2005,19(3)∶383-387.
[6]徐俊艷,何友,楊日杰.被動浮標陣搜潛中積累搜索概率研究[J].測試技術(shù)學(xué)報,2009,23(1)∶19-22.
[7]叢紅日.聲納浮標陣搜潛效能通用仿真模型研究[J].系統(tǒng)仿真技術(shù),2010,6(2)∶104-109.
[8]王磊,吳福初,陳鈺寧,等.基于聲納浮標的反潛直升機應(yīng)召搜潛仿真研究[J].指揮控制與仿真,2010,32(2)∶84-88.
[9]王曉輝,陳建勇,趙紅軍.直升機吊放聲納搜索方法效能研究[J].火力與指揮控制,2009,34(9)∶18-20.
