絞吸式挖泥船剖面工作軌跡計(jì)算*
2010-04-03 02:00:54吳景培
船舶 2010年3期
郭 輝 吳景培
絞吸式挖泥船剖面工作軌跡計(jì)算*
郭 輝 吳景培
(七〇八研究所 上海 200011)
絞吸式;挖泥船;剖面工作軌跡;算法
通過對(duì)絞吸式挖泥船進(jìn)行幾何建模,推導(dǎo)出絞吸式挖泥船疏浚寬度、疏浚深度工作軌跡公式,為開發(fā)自主知識(shí)產(chǎn)權(quán)的智能化挖泥操作設(shè)備建立數(shù)學(xué)基礎(chǔ)。
0 引 言
自1884年第一條絞吸式挖泥船在美國(guó)誕生以來,絞吸式挖泥船經(jīng)過一百多年的發(fā)展,已經(jīng)成為挖泥船王國(guó)中所占比例最大的船型。絞吸式挖泥船將泥土挖掘、吸入、排放等疏浚工序一次完成,具有連續(xù)作業(yè)等優(yōu)點(diǎn),被廣泛應(yīng)用于港口、航道的疏浚和陸地吹填工程[1]。
以荷蘭IHC和德國(guó)Krupp等為代表的國(guó)外疏浚產(chǎn)品設(shè)計(jì)公司,自80年代中期以來,采用微型計(jì)算機(jī)技術(shù),開發(fā)相應(yīng)的疏浚設(shè)備控制系統(tǒng),并取得了顯著的效果。在90年代初,荷蘭、德國(guó)、美國(guó)和日本等發(fā)達(dá)國(guó)家,開發(fā)出了疏浚軌跡顯示系統(tǒng)、動(dòng)態(tài)定位跟蹤系統(tǒng)、生產(chǎn)過程綜合監(jiān)控系統(tǒng)、泥泵控制系統(tǒng)和綜合控制操縱椅等設(shè)備。目前,國(guó)外大中型絞吸式挖泥船普遍裝有計(jì)算機(jī)控制的自動(dòng)控制系統(tǒng)[2]。
我國(guó)在這方面進(jìn)行的開發(fā)研究工作起步相對(duì)較晚,80年代末90年代初,才陸續(xù)有國(guó)內(nèi)科研單位投入研究。多家單位已經(jīng)對(duì)絞吸式挖泥船的自動(dòng)化系統(tǒng)如施工監(jiān)測(cè)技術(shù)、自動(dòng)定位定深分布式控制系統(tǒng)等方面開展研究工作,并且取得了一定的成果[3]。七〇八研究所、上海航道局、天津航道局、上海交大東偉公司等多家單位相繼研究開發(fā)了疏浚剖面監(jiān)視系統(tǒng)、產(chǎn)量監(jiān)視系統(tǒng)、動(dòng)態(tài)定位跟蹤系統(tǒng)、吃水裝載監(jiān)視系統(tǒng)等裝備[4,5,6,7]。智能化疏浚系統(tǒng)在國(guó)外疏浚船舶上已有初步應(yīng)用,而我國(guó)絞吸式挖泥船智能系統(tǒng)的研制和應(yīng)用比較落后。[3]
本文以絞吸式挖泥船為研究對(duì)象,研究操作機(jī)理與工作軌跡,為開發(fā)自主知識(shí)產(chǎn)權(quán)的智能化疏浚操作設(shè)備建立基礎(chǔ)。
1 絞吸式挖泥船工作機(jī)理
絞吸式挖泥船主要由絞刀系統(tǒng)、泥泵系統(tǒng)、動(dòng)力系統(tǒng)、定位系統(tǒng)、吸排泥系統(tǒng)(包括水上浮筒排泥管、潛管和陸上輸泥管)等組成。施工時(shí)通過安裝在絞刀架前端的絞刀運(yùn)動(dòng)實(shí)現(xiàn)破土,轉(zhuǎn)動(dòng)的絞刀將海(河)底泥(沙、石等)連續(xù)不斷地絞松,并進(jìn)行泥水混合。混合后的泥水在大氣壓的作用下,經(jīng)吸口吸入,泥泵加壓后,通過排泥管輸送到吹填區(qū)或指定的卸泥區(qū)[8]。
操作人員通過對(duì)鋼樁行車、橫移絞車、絞刀架絞車的操縱,控制船舶前后移動(dòng)、船舶的左右橫移和絞刀的上升與下降,完成疏浚工作。
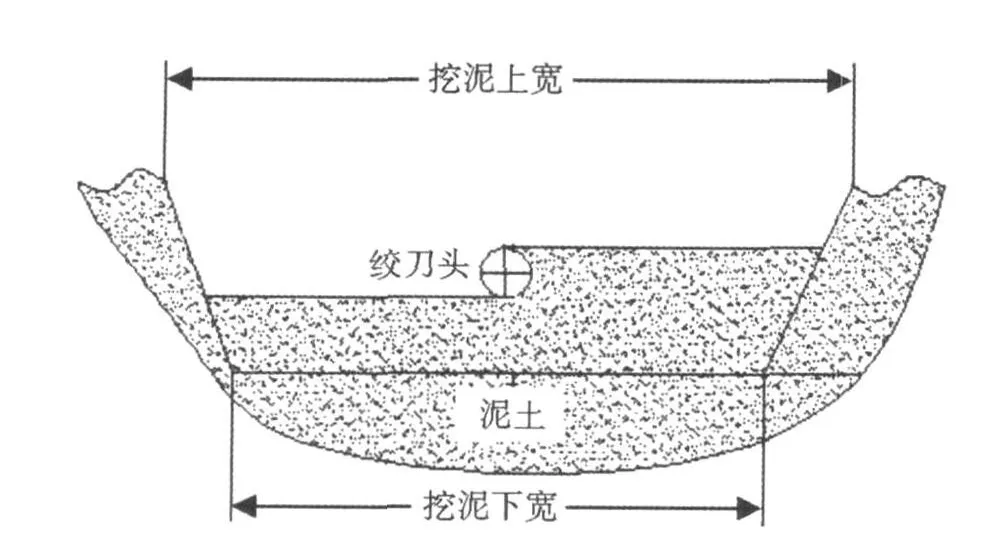
圖1 疏浚工作剖面圖
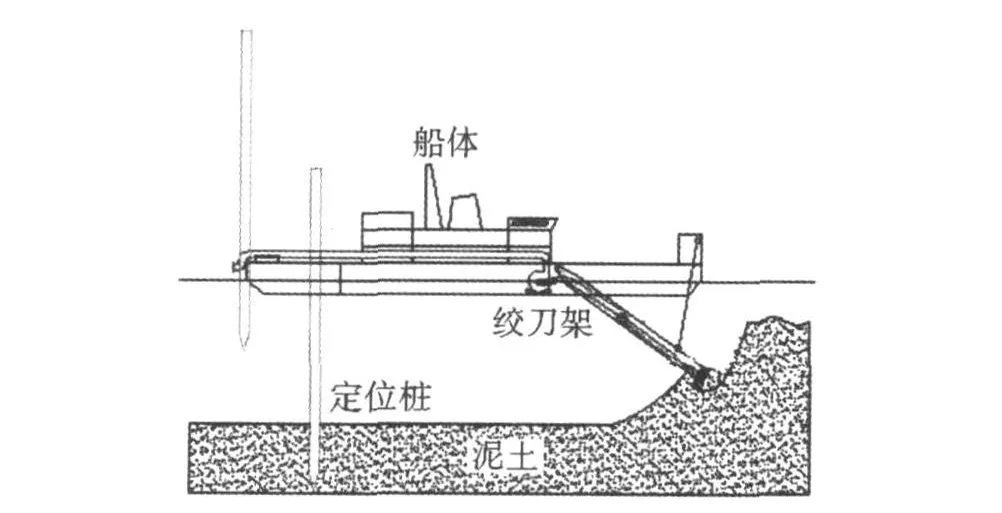
圖2 疏浚工作側(cè)視圖
本文主要研究絞刀頭剖面工作軌跡,即絞刀架轉(zhuǎn)動(dòng)角度與疏浚深度之間關(guān)系,以及船體以定位樁為軸轉(zhuǎn)動(dòng)角度與疏浚寬度之間的關(guān)系。
2 絞刀架轉(zhuǎn)動(dòng)角度與疏浚深度之間關(guān)系
在船體上同一甲板平面安裝四個(gè)液面測(cè)深裝置,使四個(gè)裝置分別處于矩形的四個(gè)頂點(diǎn)位置。為研究方便將船體抽象為長(zhǎng)方體,建立模型,如圖3、圖4、圖5所示:
圖4中符號(hào)含義見表1、表2。
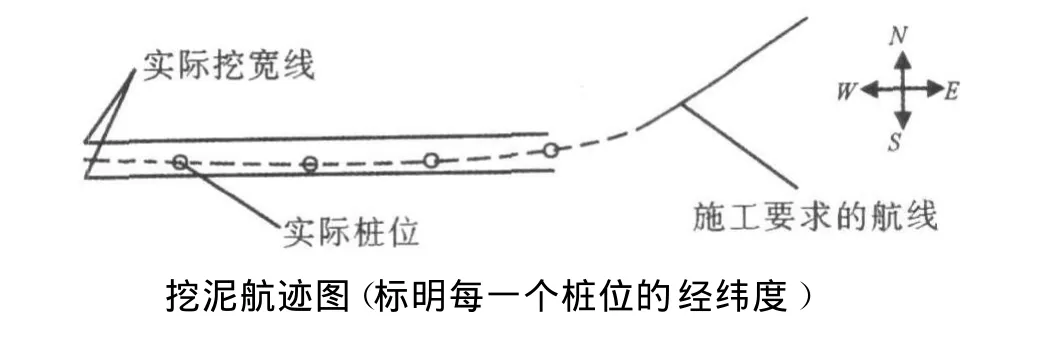
圖3 疏浚航跡圖
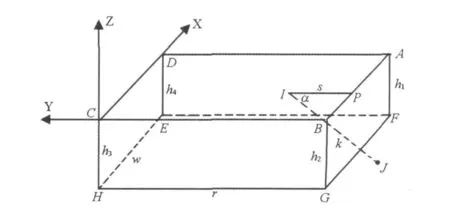
圖4 船體模型立體圖
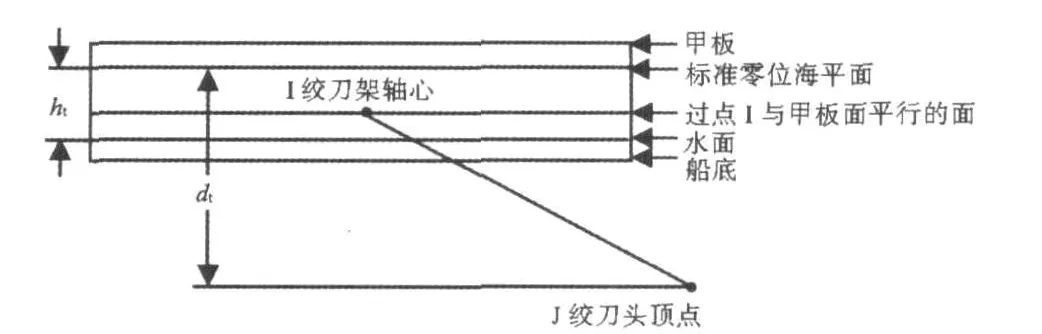
圖5 船體模型側(cè)視圖
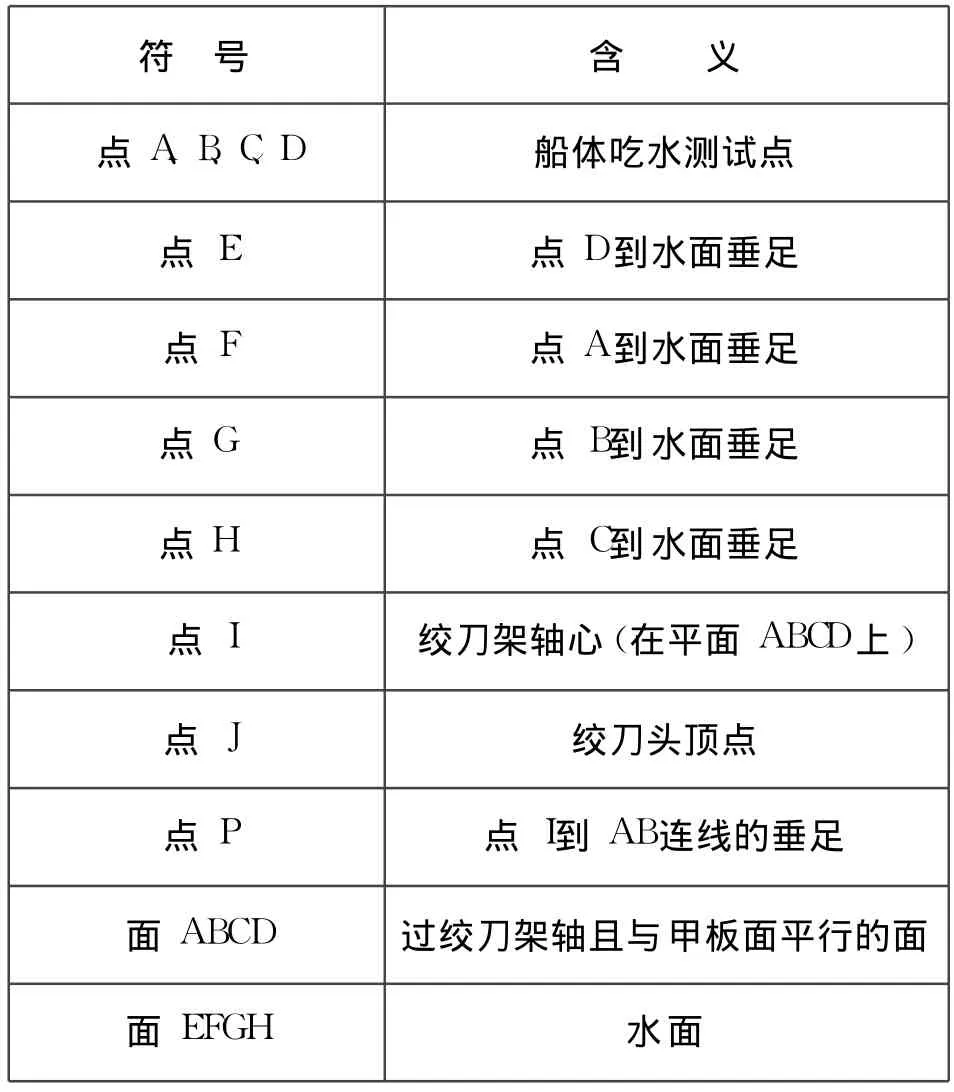
表1 疏浚深度幾何模型含義

表2 疏浚深度模型數(shù)值含義
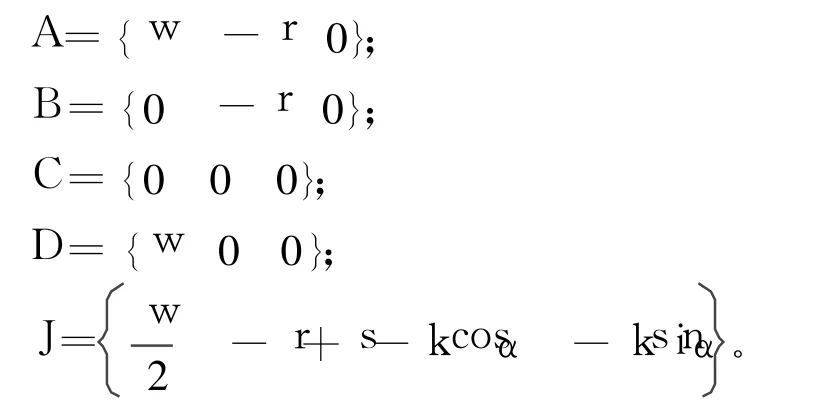
在圖4所示XYZ坐標(biāo)系中,點(diǎn)A、B、C、D、J的坐標(biāo):
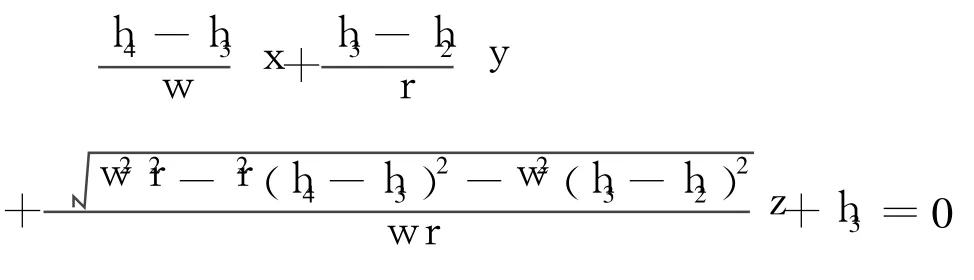
根據(jù)點(diǎn)到面公式可求得面EFGH方程:
點(diǎn)J到面EFGH距離,即絞刀頭頂點(diǎn)距水面距離為:
從而可得以下公式:
公式1:絞刀架轉(zhuǎn)動(dòng)角度與疏浚深度關(guān)系公式

公式2:絞刀架轉(zhuǎn)動(dòng)角度與疏浚深度關(guān)系公式

其中:
根據(jù)公式1,根據(jù)絞刀架轉(zhuǎn)動(dòng)角度,可以知道絞刀頭所處的深度;根據(jù)公式2,可以依據(jù)要求的疏浚深度,設(shè)置絞刀架轉(zhuǎn)動(dòng)角度。
3 船體以定位樁為軸轉(zhuǎn)動(dòng)與疏浚寬度之間關(guān)系
為了維持挖槽兩側(cè)的穩(wěn)定,挖槽橫剖面通常為倒梯形。
圖6、圖7中符號(hào)含義見表3:
圖6 疏浚寬度剖面圖
圖7 疏浚寬度俯視圖
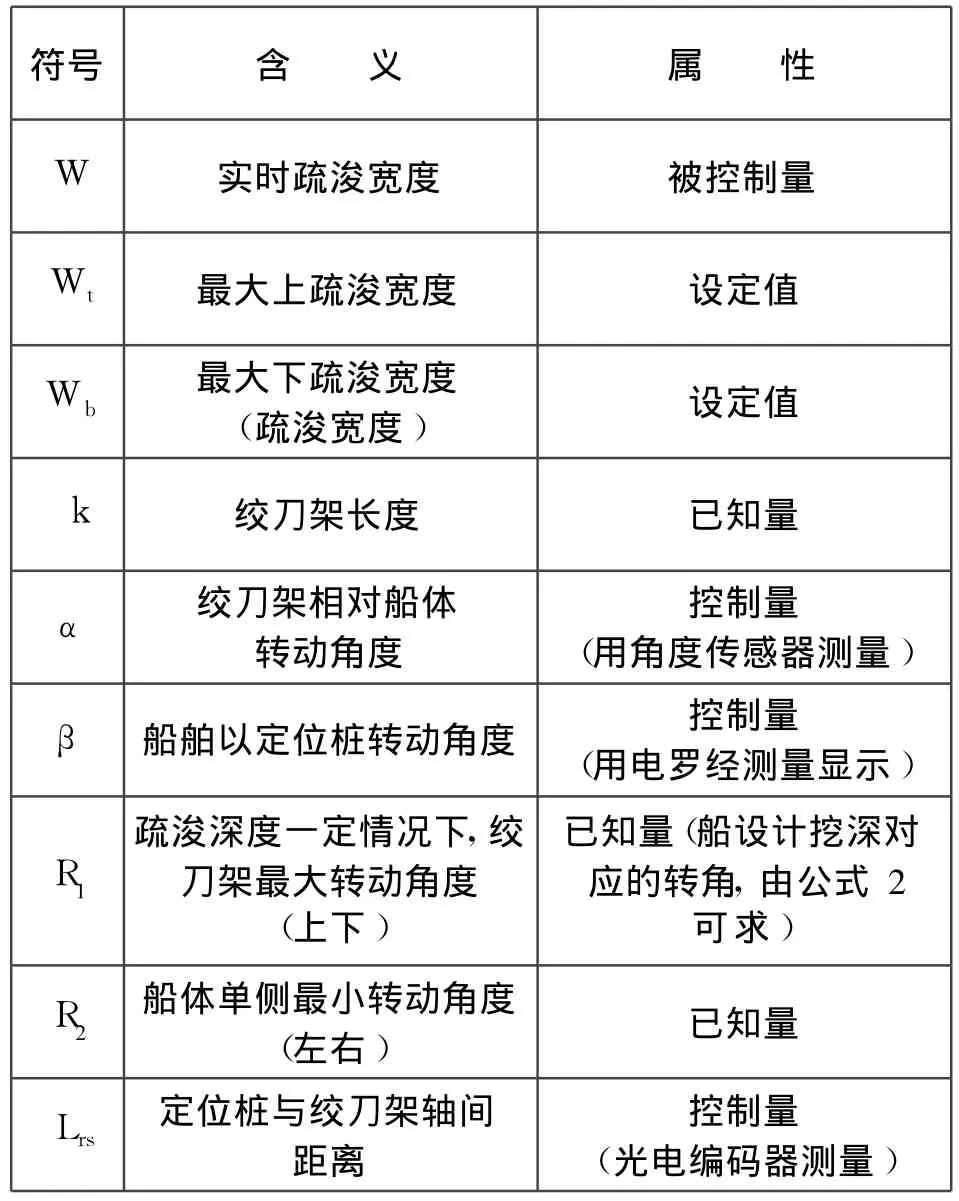
表3 疏浚寬度模型數(shù)值含義
船體以定位樁為軸的轉(zhuǎn)動(dòng)角度與疏浚寬度之間關(guān)系如下:
公式3:船體以定位樁為軸的轉(zhuǎn)動(dòng)角度與疏浚寬度之間關(guān)系公式。
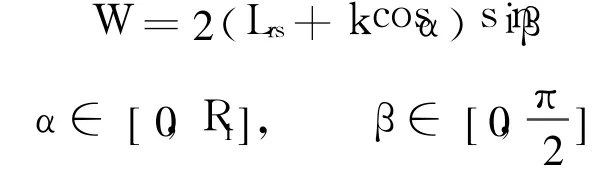
從公式3可知,當(dāng)左右兩側(cè)拋錨點(diǎn)不變、定位樁在行車船外端點(diǎn)時(shí),船體可以轉(zhuǎn)動(dòng)的角度最小;當(dāng)α=0時(shí),絞刀頭可以行走的距離最長(zhǎng);當(dāng)α=R1時(shí),絞刀頭可以行走的距離最短;當(dāng)疏浚深度、疏浚寬度確定時(shí),船體單側(cè)最小轉(zhuǎn)動(dòng)角度應(yīng)為:

4 結(jié) 語
對(duì)絞吸式挖泥船疏浚工作剖面軌跡算法的研究,不僅為下一步智能疏浚控制系統(tǒng)的研究建立了基礎(chǔ),也為挖泥船整機(jī)可靠運(yùn)行獲得最佳疏浚工況參數(shù)提供了重要保證。
[1] 丁水星.絞吸式挖泥船的疏浚設(shè)備[C].中國(guó)水力發(fā)電工程學(xué)會(huì)機(jī)械疏浚專業(yè)委員會(huì)第十八次疏浚與吹填技術(shù)經(jīng)驗(yàn)交流會(huì),2005.
[2] Mallee G.T.etc.A New Innovative Dredge Track Presentation System[C].16th world dredging conference,2001.
[3] 張迅國(guó).國(guó)內(nèi)外挖泥船-現(xiàn)狀與趨勢(shì)[J].國(guó)際船艇,2002(2):20~24.
[4] 林風(fēng),史美祥,金華.絞吸挖泥船工況監(jiān)測(cè)系統(tǒng)[J].水運(yùn)工程,2000(12):78~82.
[5] 何祖軍,俞孟蕻.絞吸挖泥船剖面顯示系統(tǒng)[J].華東船舶工業(yè)學(xué)院學(xué)報(bào),1999(6):24~27.
[6] 胡翼元,強(qiáng)耀明.利用計(jì)算機(jī)設(shè)算絞吸式挖泥船施工工況[J].水運(yùn)工程,1994(1).
[7] 田俊峰等.絞吸挖泥船計(jì)算機(jī)輔助疏浚決策系統(tǒng)[J].水運(yùn)工程,2005(3).
[8] 史中權(quán).基于PLC現(xiàn)場(chǎng)網(wǎng)絡(luò)的絞吸式挖泥船監(jiān)控系統(tǒng)[J].南京:河海大學(xué),2002.
[9] 李振旺,朱明磊.GPS定位系統(tǒng)在絞吸式挖泥船中的應(yīng)用[J].世界橋梁,2003(4).
Calculation of Working Path for the Sections of Cutter Suction Dredger
Guo Hui Wu Jingpei
cutter suction;dredger;working path for the sections;algorithm
By virtue of ageo metrical model of the cutter suction dredger,the working path equations for the working depth and width of cutter suction dredger are putted forward in this paper,constituting the mathematical fundament for developing intelligent dredging equipments with independent intellectual property.
U674.31
A
1001-9855(2010)03-0041-04
2009-11-06
郭 輝(1981.08-)男,漢族,江蘇人,助理工程師,主要從事船舶監(jiān)控系統(tǒng)設(shè)計(jì)工作。
吳景培(1945.07-)男,漢族,上海人,高級(jí)工程師,主要從事船舶電氣設(shè)計(jì)工作。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年11期)2020-12-14 06:59:52
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
藝術(shù)品鑒證.中國(guó)藝術(shù)金融(2018年8期)2019-01-14 01:14:28
藝術(shù)品鑒證.中國(guó)藝術(shù)金融(2018年10期)2019-01-08 02:44:26
藝術(shù)品鑒證.中國(guó)藝術(shù)金融(2018年6期)2019-01-08 02:43:04
藝術(shù)品鑒證.中國(guó)藝術(shù)金融(2018年12期)2018-08-26 06:03:48
