三維激光掃描儀在土壤侵蝕監測中的應用——以青海省共和盆地威連灘沖溝監測為例
2010-05-08 12:59:16馬玉鳳時云瑩丁連剛展秀麗楊典正
水土保持通報 2010年2期
關鍵詞:研究
馬玉鳳,嚴 平,時云瑩,丁連剛,展秀麗,楊典正
(北京師范大學減災與應急管理研究院地表過程與資源生態國家重點實驗室,北京100875)
三維激光掃描技術是一個使用高激光和像機捕獲坐標和圖像信息的高精度立體掃描技術。在考古、文物保護、土木工程、醫學、工業、應急服務等領域已經逐步得到了應用[1-2]。由于三維激光掃描儀器的適時性、精準性、高效性好,近年來,地學研究也開始引入該項技術,在滑坡、泥石流、礦區地表沉陷、地質構造等多方面的監測發揮了其優勢[3-5],其在水土流失監測領域中的應用也初見端倪。
Milan等[6]使用三維激光掃描儀連續觀測一條河流,計算出河流侵蝕和堆積量以及河道的變化情況;張鵬等人[7]采用連續模擬降雨實驗,結合高精度GPS,三維激光掃描儀和測針板3種方法在溝蝕過程監測和侵蝕量估算進行了對比研究;于泳等人[8]分析了基于GIS的三維激光掃描儀在水土保持方案編制中應用的可行性和突出優勢;趙軍等人[9]使用微地貌掃描儀對相同初始條件下不同坡度土槽放水和降雨實驗后的地表形態進行監測,得出坡度對坡面侵蝕及溝蝕影響的初步規律。上述研究均是通過掃描的點云建立DEM模型以及模型斷面的二維投影信息來分析計算土壤的侵蝕特征,可以在掃描儀的數據處理軟件來完成計算,但是對于以點云為邊界所圍成的無云區平面信息鮮見關注,而這種在局部地形監測土壤侵蝕二維空間信息,尤其是與遙感影像結合的平面分析在水土保持研究中有著重要意義。
本研究在青海共和盆地野外多次調查的基礎上,以威連灘沖溝溝頭的一條支溝為研究案例,采用亞米級差分GPS和三維激光掃描儀分別對該支溝進行了侵蝕邊界的監測,利用點云處理Real Works Survey軟件,AutoCAD和GIS軟件對2種測量數據進行了處理計算和對比分析,并探討了三維激光掃描技術在土壤侵蝕研究應用中的缺陷及其改進,旨在為水土流失監測提供一種新的思路和方法。
1 監測區簡介
監測區位于青海省貴南縣沙溝鄉威連灘,地理坐標為35°53.891′N ,100°50.365′E,海拔 2 767 m 。該區屬于半濕潤森林草原地帶與干旱荒漠地帶之間高原溫帶內半干旱干草原和干旱荒漠草原的過渡性生物氣候亞帶。年平均氣溫為2.3℃,年降水量為398.7 mm,多年平均干燥度為3.9[10]。沖溝發育在共和盆地內含古沙丘和黃土丘陵的河湖相沖淤積平原上,所在的灘地土壤表層30 cm為砂黃土,下伏古風成砂,抗蝕能力較差(表1)。沖溝呈西北東南走向,溝壁陡峭,平均深在21 m,溝頭平均深30 m。沖溝侵蝕變化主要表現在溝頭發育的3條支溝上,對該區的農牧業生產、居住環境和交通構成嚴重威脅[11]。

表1 威連灘沖溝土壤粒度組成
2 研究方法
2.1 測量方案
2009年3月中旬,采用集思寶E718CM GPS對研究區的支溝沿溝岸邊界進行連續點的監測,在溝邊形狀彎曲部點采集間距為0.3~0.5 m,在平直區段點采集間距為0.5~1 m 。將易測 E640靜態GPS(平面精度:±5 mm+1 ppm,高程精度:±10 mm+1 ppm)作為基準站架設在長期觀測的定樁點(圖1),通過接收靜態機的載波信號記錄載波相位數據。
同時使用Trimble GX 3D激光掃描儀對支溝的邊界進行掃描(圖2),掃描的標準差為2.5 mm,在100 m范圍內測量,位置精度為12 mm,距離精度為7 mm,角度精度為 0.003°,視野范圍垂直水平 60°×360°,設置掃描點云的水平與垂直分辨率為80 mm。以連續導線的方式建設基準站掃描,每一基站通過掃描前一站3個標靶作為后期數據處理拼接的的參照公共點,其中第二基準站架在固定的打樁點。
2.2 數據處理
對于差分GPS采集的數據,通過E640后處理軟件下載相應的基準站數據,同時在E718CM上下載流動站數據,通過FieldMapper Tools輸入打樁點的經緯度坐標,然后用基準站數據對流動站數據進行后差分處理,后差分精度為0.1~0.2 m。將處理過的數據導入ArcGIS軟件,根據GPS采集點,數字化提取支溝的邊界信息(圖1)。

圖1 差分GPS支溝監測圖
對于三維激光掃描儀采集的點云數據,首先根據公共參照點在掃描儀配套的Real works Survey軟件對掃描的每一基站數據進行自動配準,剔除誤差點云,組成完整的點云圖景(圖2)。利用處理軟件提取支溝Top平面圖,并將圖添加比例尺后導出。對于該圖無點云區邊界的勾勒計算有兩種方法,一種是將支溝圖直接導入AutoCAD軟件中,通過Sketch命令徒手繪制邊界輪廓線,但是由于拖動鼠標繪制邊界不靈巧,易滑動,輪廓線效果不佳,出入大;另一種是將二維圖導入GIS軟件,數字化邊界后轉成*.dwg格式導入Auto-CAD軟件,本研究采用了后者,根據比例尺和其所在圖中的實測線段長之比,對沖溝的二維信息進行換算。
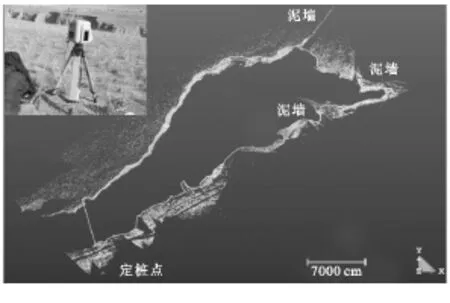
圖2 三維激光掃描儀切溝監測圖
3 結果與討論
由于監測區人工設置的泥墻,阻礙了掃描支溝溝頭末端,因此在2種數據對比分析時,把差分GPS和激光掃描儀掃描的邊界統一在一個區域范圍(表2),計算得到差分GPS測得的支溝侵蝕面積為36 524.792 1 m2,三維激光掃描儀所測得的侵蝕面積為36 435.144 9 m2,相差89.647 2 m2,而2種測量方法監測的支溝侵蝕周長相差28.13 m,差分GPS測得的侵蝕量大于三維激光掃描儀所測得的。侵蝕量差別的出現主要有2方面的原因:(1)GPS是由人工監測,涉及到安全問題,GPS的移動位置只能逼近溝岸,該研究在測量當中與實際邊界有0.3 m左右的間距,對于彎曲的邊界線,GPS的點測量還是未能更好的體現實貌,所以兩種測量的侵蝕周長差值并不大;(2)兩種儀器本身存在著誤差[12],差分GPS的誤差要高于三維激光掃描儀。三維激光掃描儀在土壤侵蝕監測中非接觸的高精度測量,較真實地反映地表形態是其最大優勢。
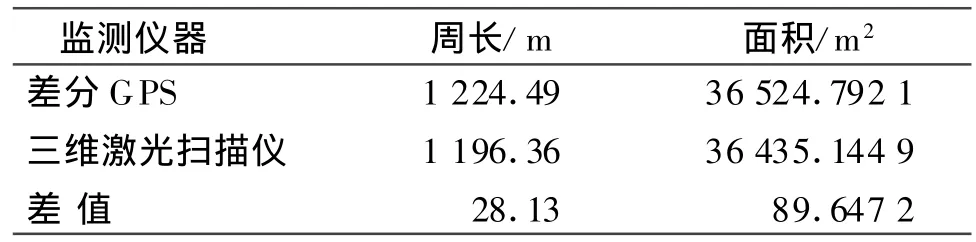
表2 差分GPS與三維激光掃描儀支溝監測侵蝕量
本次監測的侵蝕區較為平緩,但仍有掃描死角,存在數據缺損,造成數據黑洞(圖1)。支溝前端未掃描到的侵蝕面積,差分GPS計算為105.179 7 m2。以掃描儀的監測面積為基準,差分GPS與激光掃描儀每平米差0.002 m2,倘在安全的地形監測中差值更小。從數據處理的角度上來看,通過AutoCAD的二次開發軟件南方CASS,將兩種測量數據的定樁點設為統一基準點,有利于不同監測技術的對比分析,且對于掃描儀沒有掃描到的黑洞數據,高精度的差分GPS可作為一個局部的數據補充。
三維激光掃描儀掃描容易,但數據處理難,與遙感、GIS軟件兼容性較差[1],需要圖形處理軟件的多次轉換,也是制約應用于土壤侵蝕研究中的一個重要因素。在今后的研究中嘗試著用高精度的靜態機測量掃描控制點的坐標和方位,再進行坐標轉換,獲得實體點云數據在統一的坐標系中的坐標[13],這樣就能和遙感影像匹配起來進行更全面詳細的研究分析。此外對于深而陡的負地形,由于掃描儀的掃描俯角有限,高精度差分GPS采集的溝底數據也可與掃描的點云數據相匹配,構建較為完整的負地形DEM模型,為土壤侵蝕和區域生態環境保護提供可靠的基礎數據。
[1] 徐進軍,余明輝,鄭炎兵.地面三維激光掃描儀應用綜述[J].工程勘察,2008(12):31-34.
[2] 宋宏.地面三維激光掃描測量技術及其應用分析[J].測繪技術裝備,2008,10(2):40-43.
[3] Du J C,Teng H C.3D laser scanning and GPS technology for landslide earthwork volume estimation[J].Automation in Construction,2007,16:657-663.
[4] 郭祥,劉卉.三維激光掃描技術及其在地質中的應用展望[J].軟件導刊,2009,8(3):183-185.
[5] 李秋,秦永智,李宏英.激光三維掃描技術在礦區地表沉陷監測中的應用研究[J].煤炭工程,2006(4):97-99.
[6] Milan D J,Heritage G L,Hetherington D.Application of a 3D laser scanner in the assessment of erosion and deposition volumes and channel change in a proglacial river[J].Earth Surface Processes and Landforms,2007,32:1657-1674.
[7] 張鵬,鄭粉莉,王彬,等.高精度GPS,三維激光掃描和測針板三種測量技術監測溝蝕過程的對比研究[J].水土保持通報,2008,28(5):11-15,20.
[8] 于泳,王一峰.淺談基于GIS的三維激光掃描儀在水土保持方案編制中應用的可行性[J].亞熱帶水土保持,2007,19(2):53-55.
[9] 趙軍,雷廷武,張晴雯,等.激光微地貌掃描儀的開發研制及在坡面侵蝕研究初步應用[J].山東農業大學學報:自然科學版,2001,32(2):201-206.
[10] 董光榮,高尚玉,金炯,等.青海共和盆地土地沙漠化與防治途徑[M].北京:科學出版社,1993:10-33.
[11] 馬玉鳳,嚴平,王耿銳,等.青海共和盆地威連灘沖溝侵蝕遙感監測的初步結果[J].水土保持研究,2009,16(2):1-5.
[12] 鄭德華,沈云中,劉春.三維激光掃描儀及其測量誤差影響因素分析[J].測繪工程,2005,14(2):32-34,56.
[13] 馬立廣.地面三維激光掃描儀的分類與應用[J].地理空間信息,2005,3(3):60-62.
猜你喜歡
體育科技文獻通報(2022年3期)2022-05-23 13:46:54
天津外國語大學學報(2021年3期)2021-08-13 08:32:18
遼金歷史與考古(2021年0期)2021-07-29 01:06:54
科技傳播(2019年22期)2020-01-14 03:06:54
遼金歷史與考古(2019年0期)2020-01-06 07:45:20
民用飛機設計與研究(2019年4期)2019-05-21 07:21:24
電子制作(2018年11期)2018-08-04 03:26:04
汽車工程學報(2017年2期)2017-07-05 08:13:02
國際商務財會(2017年8期)2017-06-21 06:14:14
電子制作(2017年23期)2017-02-02 07:17:19
