基于機器視覺的船舶升沉檢測方法
2010-05-11 03:48:36鄒木春曾應堅
自動化與信息工程 2010年3期
鄒木春 曾應堅
1 引言
船舶的工作環境十分復雜,受風、浪、流、潮的影響,不可避免地產生顯著的升沉搖擺運動,給船上作業、水下作業帶來一定的影響,甚至會導致安全事故[1]。因此準確檢測船舶的升沉位移量,為生產系統提供合適的補償是非常必要的。
目前檢測船舶的升沉位移量方法主要有姿態傳感器法、零波面超聲波檢測法和傳感器系統檢測法等[2~4]。姿態傳感器法是為測量船體或水中拖體的動態變化而設計的,儀器需固定安裝在船體上,可以提供實時高動態精度的運動測量數據。但它價格比較昂貴,固定安裝后需作比較復雜的調試后方能使用;零波面超聲波檢測法基于零波面理論,利用超聲測距原理進行測量。其在環境復雜的情況下,噪聲和誤差都比較大,而且該辦法需安裝三個具有恒深度自動調節功能的超聲發射器,實際操作困難;傳感器系統檢測法則需在補給船(岸基)與被補給船上分別安裝各種傳感器,然后利用電腦系統來分析處理數據,調試系統時需考慮各傳感器的安裝位置與性能,對于經常變換被補給船只時,安裝調試工作量大、準確度不高。綜合上述辦法的利弊,結合民用起重作業的特點,本文提出一種基于機器視覺的船舶升沉檢測方法。
2 船舶升沉檢測系統架構
在波浪補償系統中,需要檢測的數據是補給船(或岸基)與被補給船的相對位置。對于起重作業來說,需要的僅是被補給船上貨物著落點與補給船(或岸基)上起重機吊臂間的相對高度。檢測系統架構如圖1所示,主要包括兩個攝像頭、一臺電腦(或DSP系統)、一個特征物體。系統雙目攝像頭固定安裝在起重機吊臂上,安裝時兩攝像頭光軸平面與水平面垂直。在被補給船上的貨物著落點附近放置特征物體,利用雙目立體視覺三維測量的辦法即可檢測出攝像頭與特征物體之間的相對位置,從而得出相對高度。為了便于圖像處理,系統采用的特征物體是一圓形色塊。

圖1 系統架構圖
3 基于機器視覺的船舶升沉檢測方法
3.1 船舶升沉雙目立體視覺三維測量機理
船舶升沉雙目立體視覺三維測量原理如圖2所示,設左攝像頭O-xyz位于世界坐標系的原點且無旋轉,圖像坐標系為Ol-XlYl,,有效焦距為fl;右攝像頭坐標為Or-xryrzr,圖像坐標系為Or-XrYr,,有效焦距為fr。
對于船舶升沉過程同一特征點P,在左右兩攝像機的圖像坐標分別為Pl=(Xl,Yl)、Pr=(Xr,Yr)

圖2 雙目立體視覺測量中空間點三維重建
則空間P點的三維坐標可以表示為

其中,O-xyz坐標系與Or-xryrzr坐標系之間的空間轉換矩陣為Mlr,

R,T分別為O-xyz坐標系與Or-xryrzr坐標系之間的旋轉矩陣和原點的平移變換矢量。標定R、T參數,即可根據圖像處理的輸出結果求出 P的實際坐標位置[5]。本檢測系統安裝左右兩攝像機時,因兩攝像機光軸相交,且構成的平面與兩攝像機圖像平面垂直,Or-XrYr,系在與 O-xyz系重合的基礎上繞 y軸旋轉 θ角度并在xz平面上平移到(tx,tz),若旋轉矩陣用歐拉角表示[6],則可得到如下R和T。

3.2 船舶升沉圖像處理

圖3 獲取的原圖
在雙目測距系統中,圖像處理是關鍵,本系統中圖像處理的辦法如下:雙目攝像頭獲取圖像后(見圖3),為使目標特征色塊突出,先對圖像進行針對特征顏色的色彩增強處理,盡量拉大圖像色素值的差距。同時,為使后續圖像處理節約時間和空間,把彩色圖像轉換為灰度圖像,再二值化,效果如圖4所示。接著對圖像進行中值濾波,去掉離散的孤點,修補目標內部的一些空白點[7],效果如圖5所示。最后在MATLAB中利用區域描繪子區域的質心求法[8],即函數 regionprops(L,’Centroid’),L 為圖像矩陣,Centroid是各色塊質心的 X、Y坐標向量,由此求得各區域質心坐標。根據特征色塊面積最大特點,可得到目標特征色塊點在左右兩個平面圖像中的坐標Pl=(Xl,Yl)、Pr=(Xr,Yr)。將 Xl、Yl、Xr、Yr代入經過標定后的雙目測距公式(2),便可得到目標點在空間的坐標(X,Y,Z),從而得到直接反映了補給船(或岸基)與被補給船的相對垂直距離Z,即船舶的升沉量。系統數據處理流程圖如圖6所示。

圖4 色彩增強與二值化結果

圖5 去孤立點濾波結果
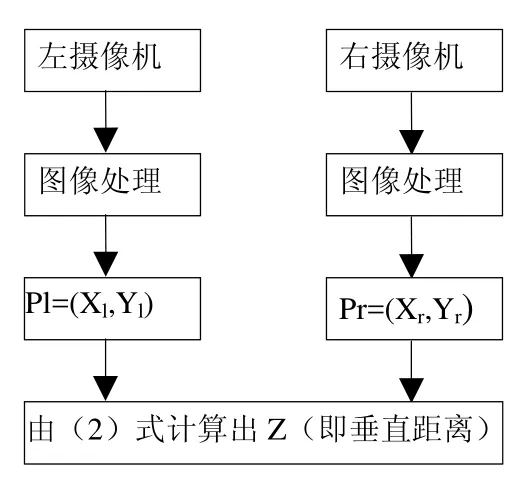
圖6 系統數據處理流程圖
4 應用試驗
依據上述方法,先對本文所用的系統進行標定。試驗時,將特征色塊放在實驗船舶中不同方位(即空間坐標X、Y)、不同距離(即空間坐標Z),獲取特征點在左右攝像機攝取的圖像坐標Pl(Xl,Yl)、Pr(Xr,Yr)后,利用MATLAB進行處理,即可計算出特征點到攝像頭的垂直距離Z,如下表1所示。

表1 雙目測距試驗數據
應用表明,該系統可以得到比較滿意的效果。
5 結束語
由2個攝像機和計算機組成的機器視覺測量傳感器是一種非接觸式、測量快速的傳感器,在一定的范圍內具有較高的測量精度。這種基于機器視覺的船舶升沉檢測方法安裝調試簡單、價格便宜,在民用起重作業的波浪補償系統中,它既可以代替更優于其他測量辦法,為波浪補償系統提供船舶升沉量的數據,滿足安全作業的要求。
[1] Wang Fan,Jin Hongzhang.Design a mini-type marine attitude measurement system for self-propelled model trials[J].Measurement: Journal of the International Measurement Confederation,2009,42(6): 954-962
[2] 郭發濱,張衛紅.姿態傳感器在水深測量中的應用[J].海洋測繪,2004,24(4):56-58
[3] 羅忠輝,吳百海,龍建軍等.一種新型深海采礦船升沉信號采集系統設計[J].儀表技術與傳感器,2003,(9): 20-22
[4] 徐小軍,何平,陳循,等.基于DSP的主動式波浪補償起重機控制系統設計[J].國防科技大學學報,2008,30(1):110-114
[5] 張廣軍.視覺測量[M].北京:科學出版社,2008:135-136
[6] 張瑞森,劉冀偉.基于雙目機器人的實時測距與追蹤系統[J].電子器件,2007,30(5):1619-1620
[7] 張錚,黃艷平,薛桂香.數字圖像處理與機器視覺[M]. 北京:人民郵電出版社,2010-04:156-158
[8] 張錚,黃艷平,薛桂香.數字圖像處理與機器視覺[M].北京:人民郵電出版社,2010-04:381-382
猜你喜歡
艦船科學技術(2022年14期)2022-09-22 03:07:40
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
船舶(2021年4期)2021-09-07 17:32:22
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
海峽科技與產業(2016年3期)2016-05-17 04:32:12
